
TORU 5.5 Komponenter
Generelt overblik

1) Tårn, 2) Drivenhed, 3) Håndteringsenhed til skotøjsæsker, 4) Rygsæk
TORU 5.5 består grundlæggende af fire komponenter. Håndteringsenheden til skotøjsæsker (3) bruges til at håndtere de genstande, der plukkes. Tårnet (1) beskytter mennesker mod farlige maskinbevægelser. Drivbunden (2) sørger for kontakt til gulvet. Rygsækken (4) fungerer som opbevaring af de genstande, der plukkes.
Håndteringsenhed til skotøjsæsker
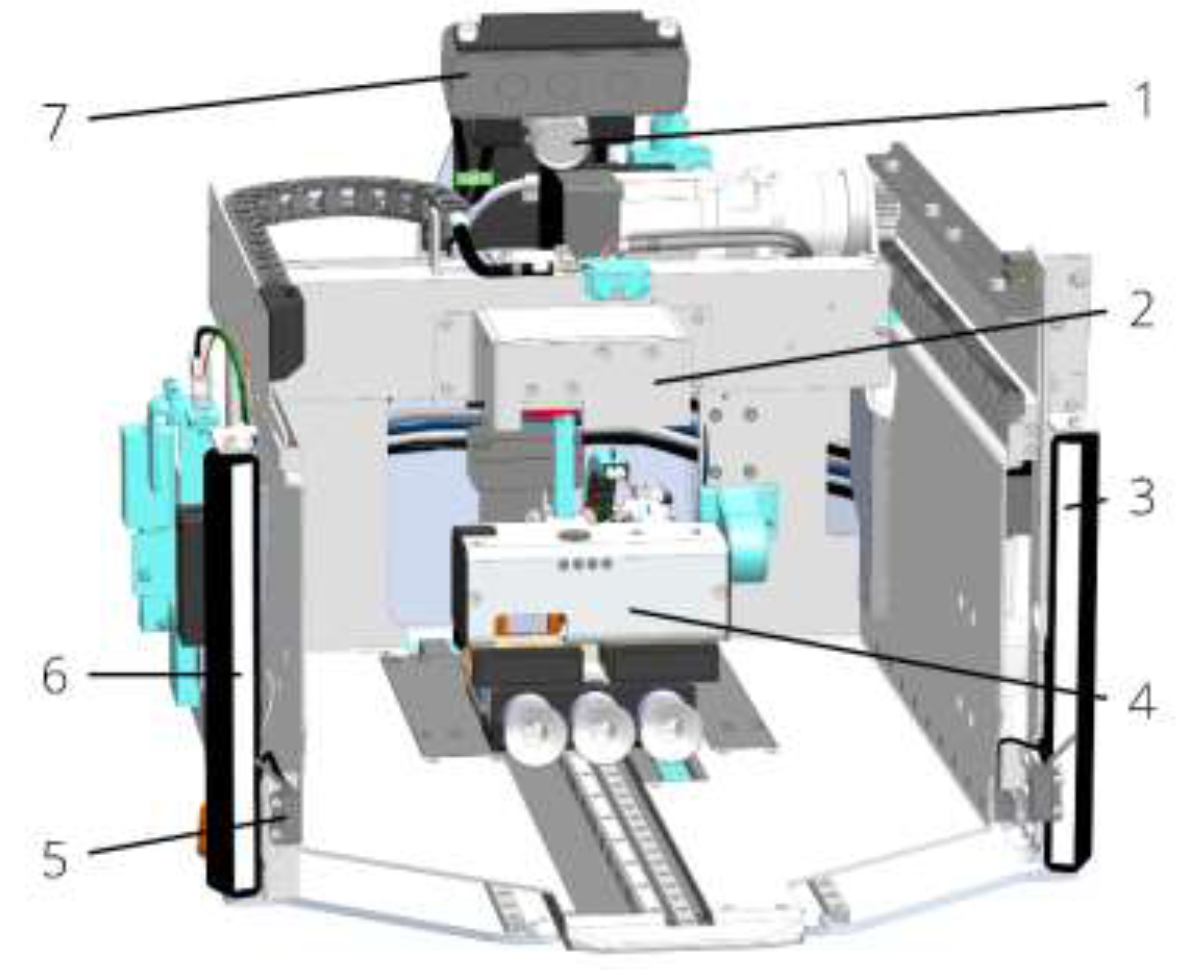
1) Stregkodekamera, 2) Tilbageskubbe-enhed, 3) LED venstre, 4) Vakuumenhed, 5) Lysbarriere, 6) LED højre, 7) 3D-kamera
Håndteringsenheden til skotøjsæsker interagerer med de genstande, der skal plukkes. Med 3D-kameraet kan griberen genkende genstandenes position, størrelse og retning i plukkestativet. Stregkodekameraet bruges til at genkende stregkoder på skoæsken. Med tilbageskubbe-enheden kan skotøjsæskerne skubbes tilbage i plukkestativet over den nederste æske, når en stak æsker er blevet grebet.
Forsiden

1) Nødstopknap, 2) Trykknap
Frontdækslet beskytter robottens indre. Der er monteret en nødstopknap (1) og en trykknap (2) på den.
Tårn

1) Tårn indvendigt, 2) Tårn udvendigt
Tårnet består af to dele, det indvendige tårn (1) og det udvendige tårn (2). Det udvendige tårn beskytter mennesker mod bevægelige maskindele. Den indvendige søjle forlænges med griberen, når tårnet teleskoperes. Tårnet kan drejes og åbner kun i stativets retning.
Rygsæk
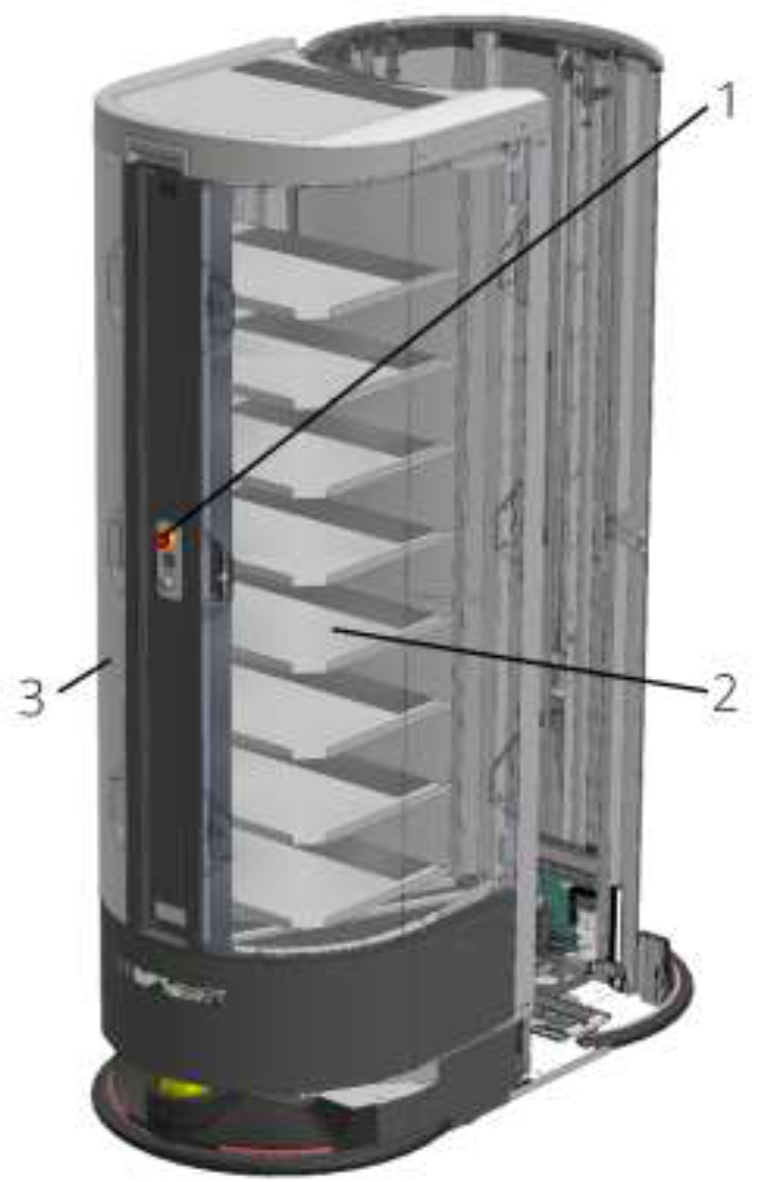
1) Kontrolpanel, 2) Låge til rygsæk, 3) Højre sidepanel
Rygsækken fungerer som opbevaring til de æsker, der bliver plukket. Kontrolpanelet (1) er placeret i midten af rygsækken. Lågen til rygsækken og dækslet (2, 3) beskytter personer mod bevægelige maskindele. De er skruet fast og kan afmonteres, når der skal udføres vedligeholdelsesarbejde og procesobservation.
Kontrolpanel
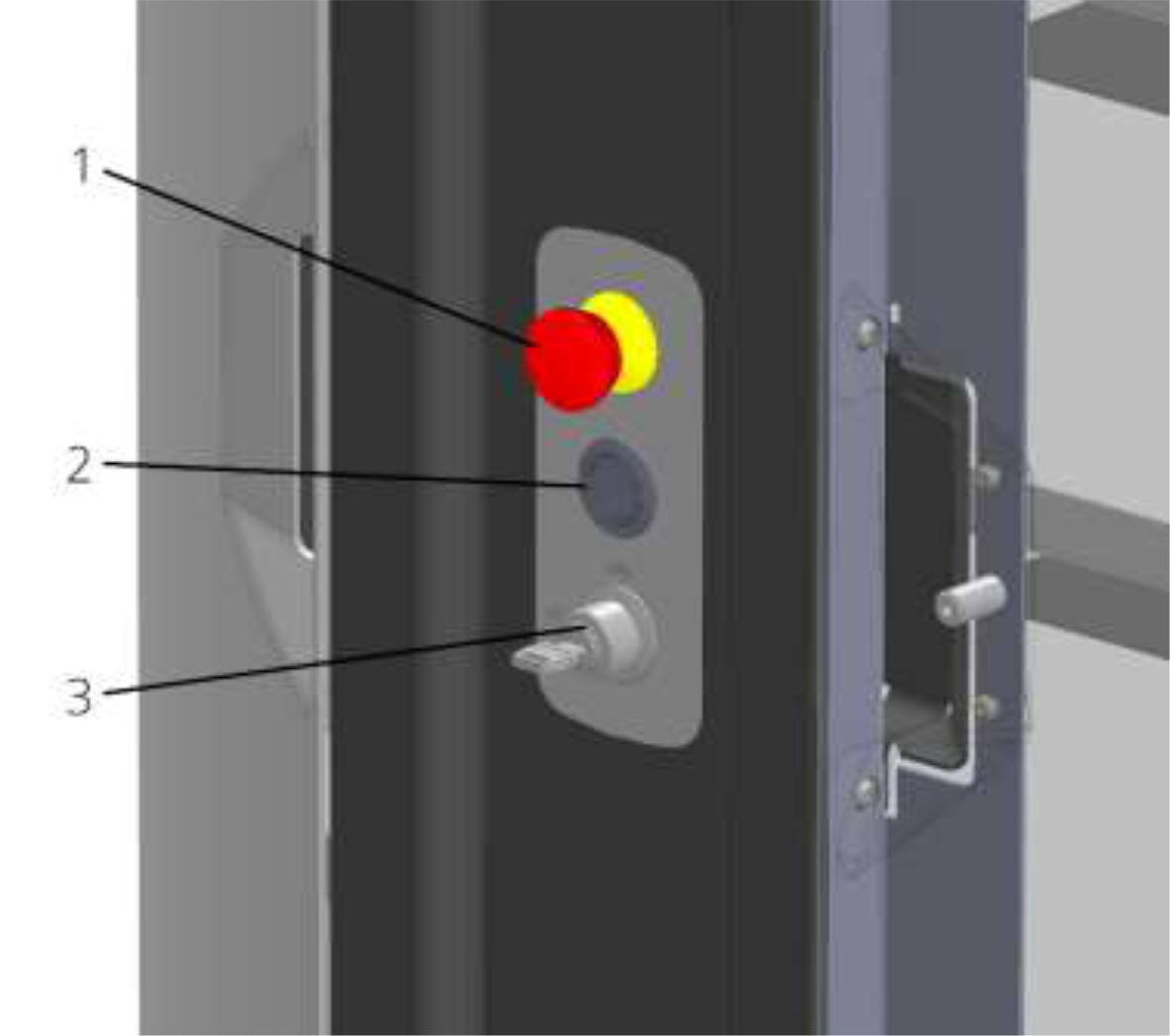
1) Nødstopknap, 2) Trykknap, 3) Nøglekontakt
Kontrolpanelet består af tre elementer. Når der trykkes på nødstopknappen (1), standser den alle robottens farlige bevægelser. Trykknappen (2) bruges til at få robotten tilbage til normal drift efter nødstop. Nøglekontakten (3) kan bruges til at tænde og slukke for robotten.
Drivbund

1) Rullehjul, 2) Drivhjul venstre, 3) Ladekontakt venstre, 4) Ladekontakt højre, 5) Drivhjul højre
.png?inst-v=a5276c9d-d703-4227-8c4d-b7392568c758) | Forsigtig! Laserklasse 1 iht. DIN EN 60825-1:2003-10. Alle anvendte sensorer har højst laserklasse 1. |
|---|
Drivbunden har kontakt med underlaget. Den er udstyret med sikkerhedsanordninger og sensorer, der registrerer omgivelserne omkring robotten. Industri-pc'en styrer robotten, mens sikkerhedsstyringen forhindrer, at robotten bevæger sig på en farlig måde.
Ladestation

Ladestationen bruges til at oplade robottens batterier. Robotten nærmer sig automatisk ladestationen under normal drift. En deaktiveret robot kan skubbes manuelt hen til ladestationen (se "Sådan oplades robotten manuelt").
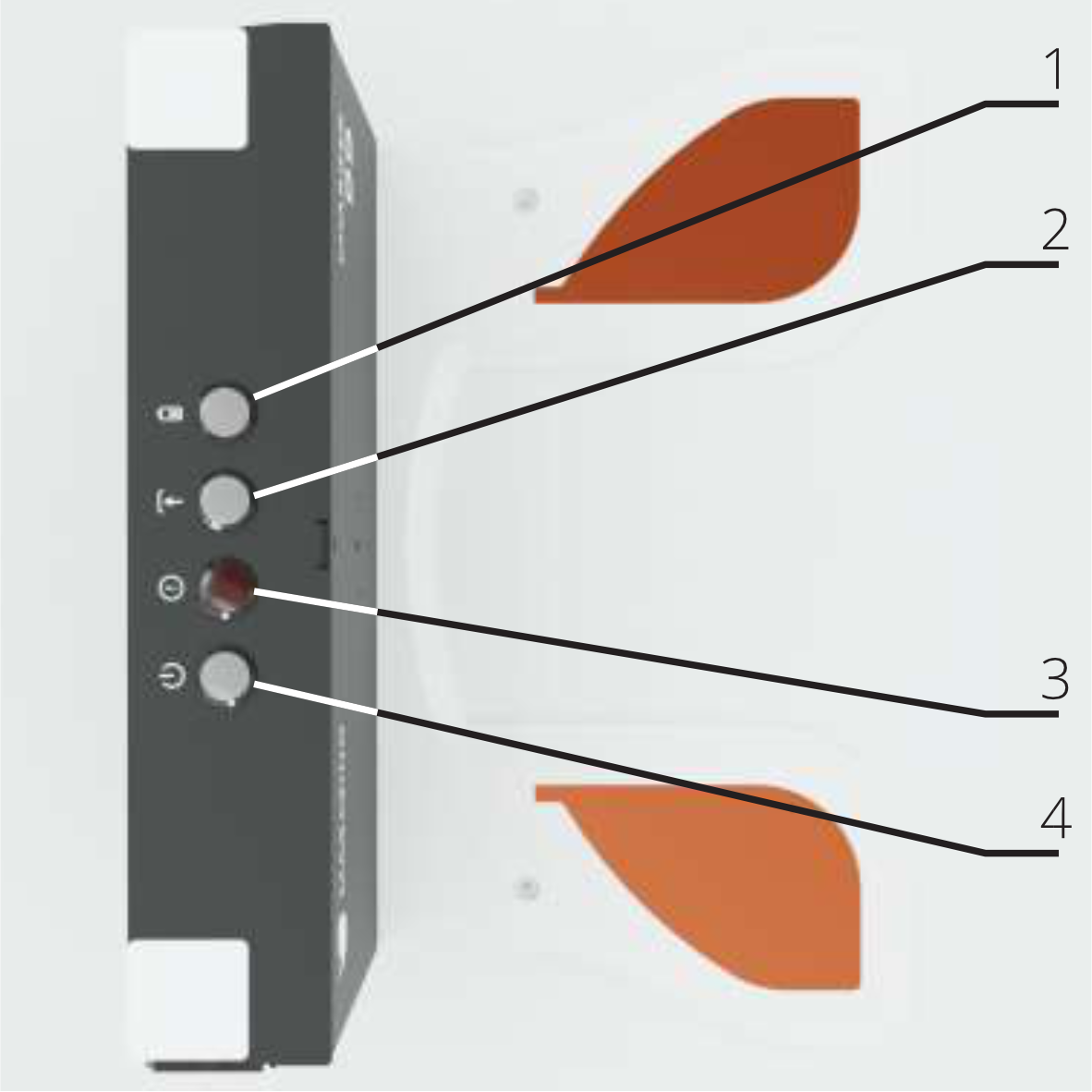
1) Opladningstilstand, 2) Dockingtilstand, 3) Fejlregistrering, 4) Strømforsyningstilstand.
Ladestationen har fire LED'er over ladestationen. De enkelte LED'er og samspillet mellem flere LED'er giver feedback om ladestationens aktuelle status og ladeprocessen.
Sådan foretages fejlfinding af ladestationen
 | Betydning |
 | Ladestationen er slukket.
|
 | Ladestationen starter op.
|
 | Ladestationen har opdaget en fejl.
|
 | En robot er blevet registreret, men er endnu ikke i ladeposition. Juster robottens position, indtil ladepositionen er registreret. |
 | Robotten oplader. |
 | Robotten er fuldt opladet. |
Piktogram | Betydning | Piktogram | Betydning | ||
|---|---|---|---|---|---|
 | LED'en lyser ikke. |  | LED'en blinker | ||
 | LED'en lyser. |  | LED'en blinker | ||
Sådan monteres ladestationen
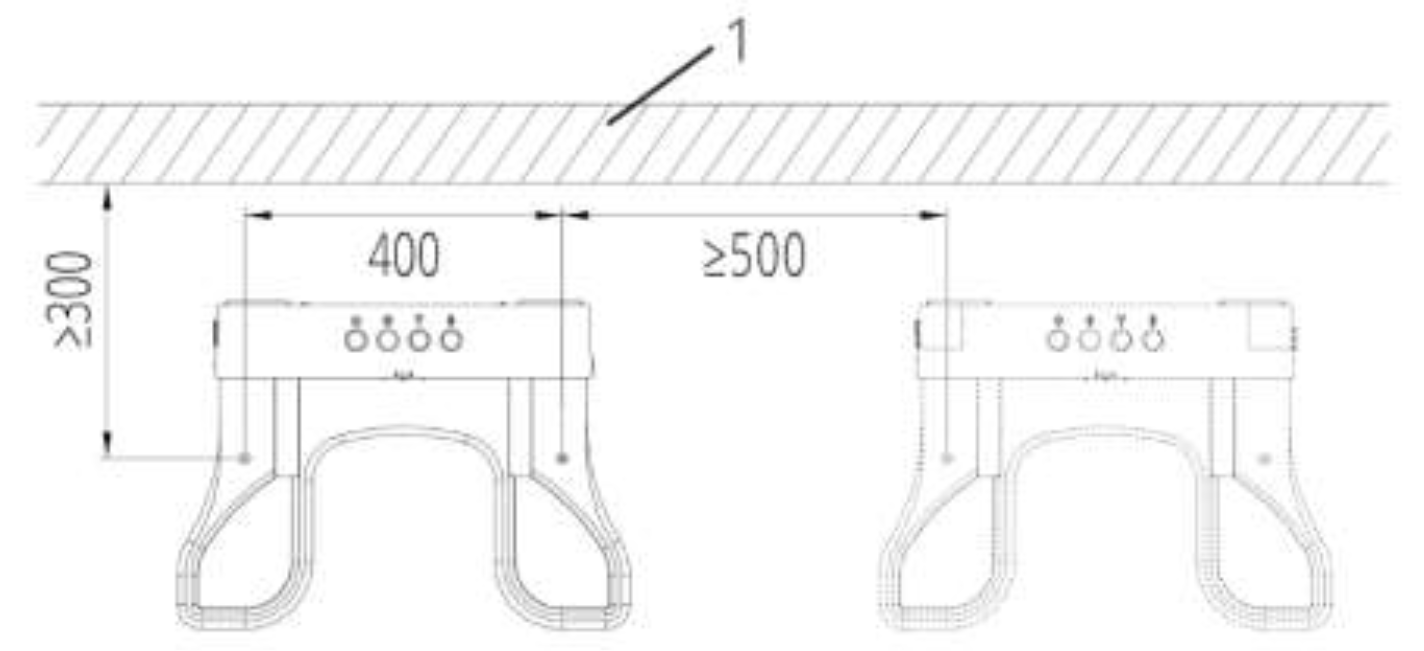
1) Væg
Ladestationerne skal skrues godt fast i gulvet. Hullerne til montering skal forberedes som vist ovenfor.
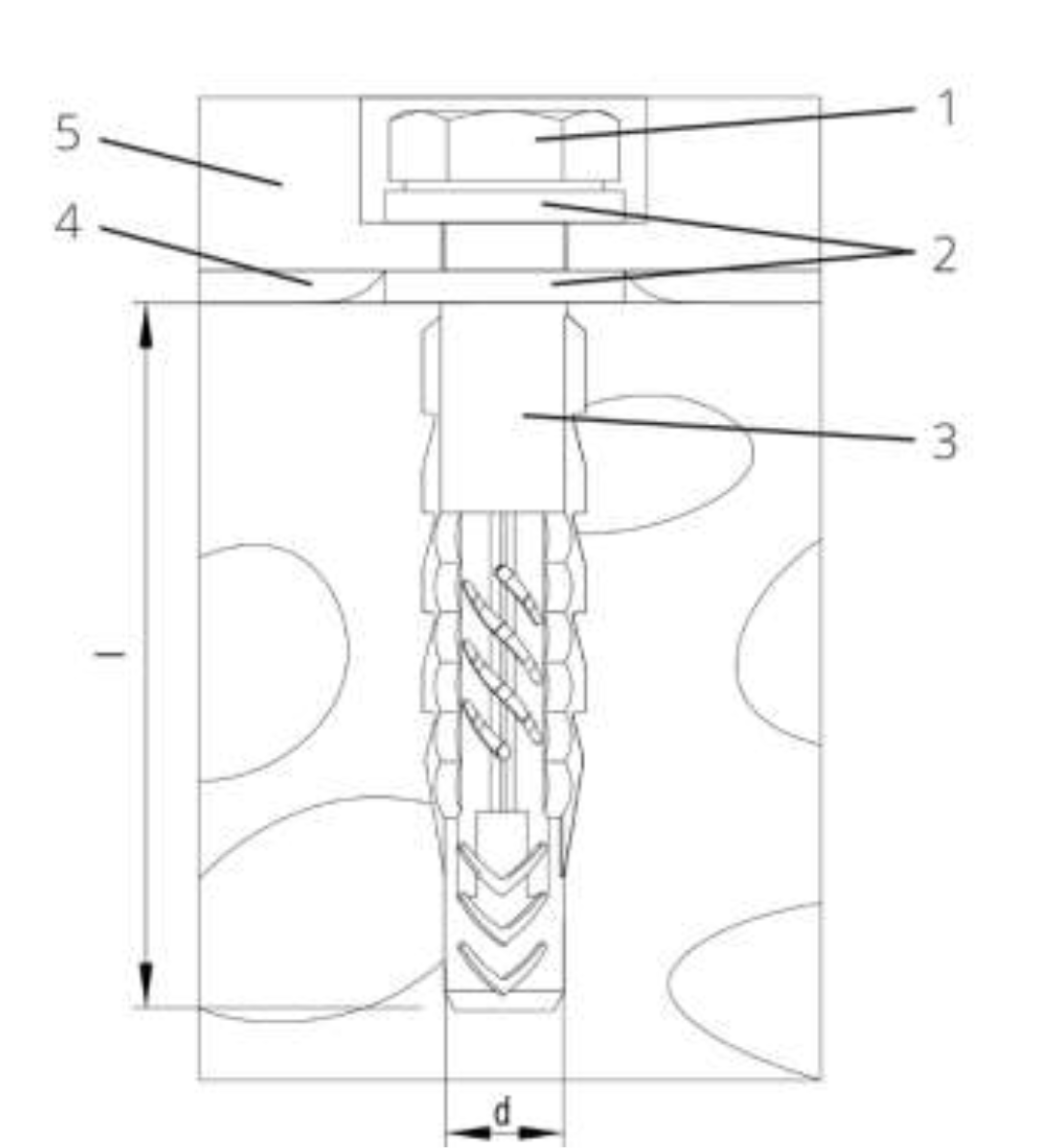
1) Sekskantskrue (d = 6 mm, l ≥ 30 mm), 2) Skive, 3) Dyvel, 4) Skumgummimåtte, 5) Ladestationens bundplade