
Wöchentliche Aufgaben
Aufgaben zur Sichtprüfung
Führen Sie die folgenden Aufgaben zur Sichtprüfung durch. Wenden Sie sich im Falle eines Schadens an den Kundendienst.
LED-Streifen
Prüfen Sie, ob alle vier LED-Streifen funktionsfähig sind. Sie sollten rot blinken, wenn der Not-Halt-Taster gedrückt wird.
Führen Sie eine Sichtprüfung der KLT Presse auf Verschleiß und Beschädigung durch.
Führen Sie eine Sichtprüfung der Riemen auf Verschleiß und Beschädigung durch.
Überprüfen Sie Kameras und Sensoren visuell auf Schäden:
Sicherheitslaserscanner vorne und hinten (3x).
Tiefenkamera im Greifer.
Barcode-Kamera im Greifer.
Reflektorstreifen-Detektor im Greifer
Navigationskameras vorne und hinten.
Top-Laserscanner.
Tiefenkamera über der KLT-Presse.
Binärsensor an der KLT-Presse.
Überprüfen Sie die SOTO Ladestation visuell auf Schäden.
Führen Sie eine Sichtprüfung aller Regalböden und Regaladapter durch. Sicherstellen, dass
Die Regalböden sich in der modellierten Position befinden (innerhalb der Toleranzen)
Der Bereich um die Andockform frei ist
Für die oberen Andockformen prüfen Sie bitte, ob die mit der Stange verbundene Ebene parallel zur Vorderseite des Regals verläuft. Abweichungen können dazu führen, dass der Roboter schräg an das Regal andockt, was zu Handling-Problemen führen kann.
Die Regaladapter nicht verschoben oder beschädigt sind
Die QR Codes und das reflektierende Band auf dem Adapter nicht beschädigt sind
Die Rollen im Regalfach sind weder blockiert noch beschädigt. Dies kann dazu führen, dass KLTs im Fach stecken bleiben und nicht herunterrollen.
Die Lichtvorhänge ausgerichtet sind
Überprüfen Sie anhand der blauen Diagnose-LEDs, ob die Lichtvorhänge von SOTO korrekt ausgerichtet sind.
Fahren Sie SOTO über Werkzeuge → "Roboter herunterfahren" herunter.
Schalten Sie SOTO über den physischen Schalter aus
Schalten Sie SOTO über den physischen Schalter wieder ein und warten Sie, bis die blauen Diagnoseleuchten an den Lichtvorhängen aufleuchten. Sie bleiben für zwei Minuten sichtbar.
Prüfen Sie die blauen Diagnose-LEDs an jedem der vier Lichtvorhang-Empfänger (siehe Abbildung unten). Die Lichtvorhang-Empfänger befinden sich am unteren Ende jeder der vier Öffnungen von SOTO. Wenn an einem Lichtvorhang zwei oder weniger blaue LEDs leuchten, wenden Sie sich bitte an den Support, um die Lichtvorhänge neu auszurichten.
.jpg?inst-v=2a9dbfcd-d3f9-45af-871a-a5760069f4dc)
Reinigungsanleitung
Reinigung der Bremsstange der vertikalen Achse
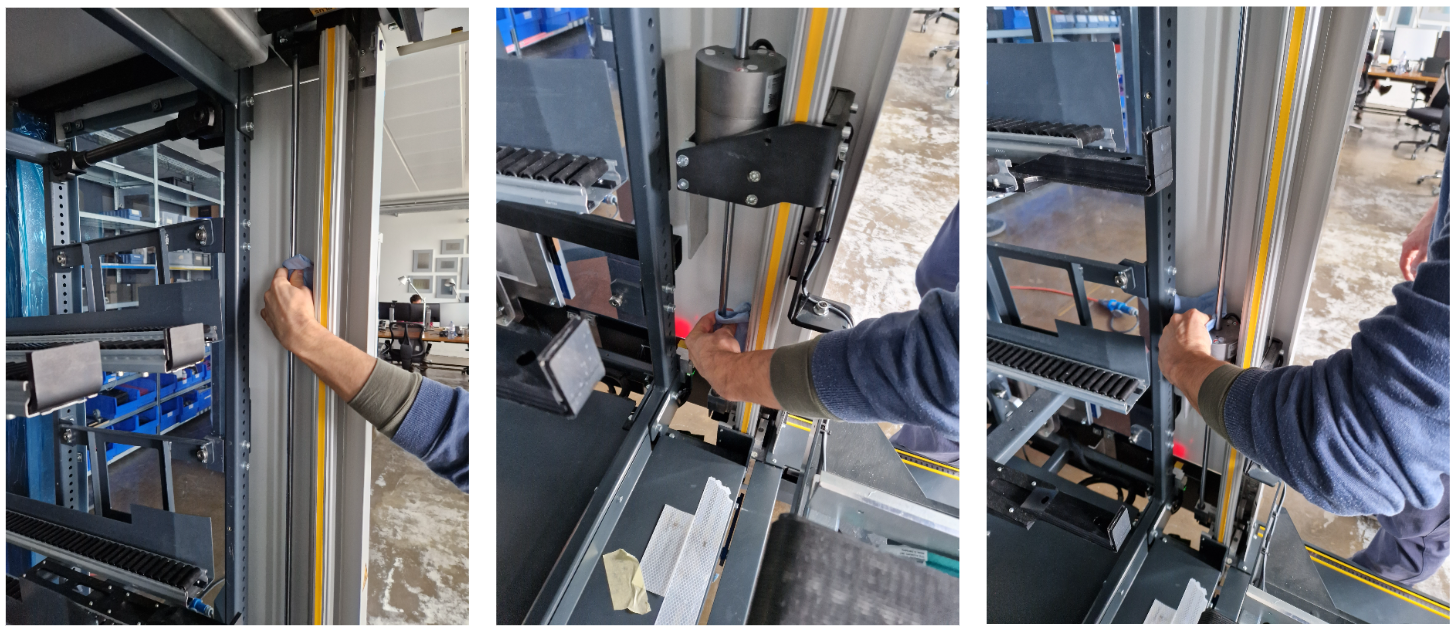
Reinigen und entfetten Sie jede der beiden Bremsstangen der vertikalen Achse (zwischen dem Rucksackregal und dem Greiferraum).
Drücken Sie den Not-Halt-Taster, um die Arbeit am Roboter zu sichern.
Nehmen Sie ein Papiertuch und befeuchten Sie es mit einem handelsüblichen Bremsenreiniger/Entfetter.
Wischen Sie die beiden Bremsstangen der vertikalen Achse (oberhalb und unterhalb der Bremse) und die Bremse selbst mit dem Tuch ab.
Lösen Sie den Not-Halt-Taster.
Reinigung der Förderbänder
Clean the two conveyor belts in SOTO’s gripper.
Drücken Sie den Not-Halt-Taster, um die Arbeit am Roboter zu sichern.
Verwenden Sie Seifenwasser und ein Tuch, um die Oberfläche der Riemen zu reinigen.
Trocknen Sie die Oberfläche nach der Reinigung mit einem trockenen Tuch ab.

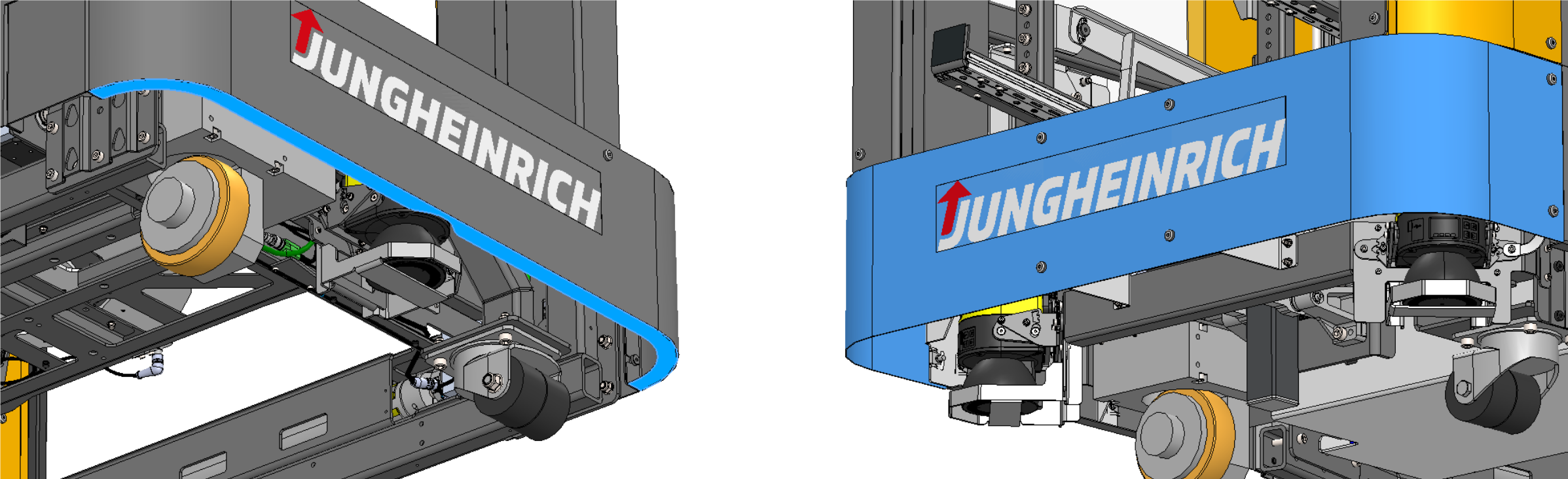
Schieben Sie das Förderband nach hinten (siehe Abbildung unten), und wischen Sie die Oberseite des Förderbands ab. Wiederholen Sie den Vorgang, bis der gesamte Riemen sauber ist.

Wiederholen Sie den Vorgang für den zweiten Riemen.
Lösen Sie den Not-Halt-Taster.
Reinigen der Kamera
.png?inst-v=2a9dbfcd-d3f9-45af-871a-a5760069f4dc) | Achtung! Vermeiden Sie es, die Kameras zu berühren. Bereits kleine Verschiebungen der Kamera können die Leistung beeinflussen, so dass eine Neukalibrierung durch einen Servicetechniker erforderlich sein kann. |
|---|
Überprüfen Sie die Barcode-Kamera, die Greifertiefenkamera und die Tiefenkamera über der KLT-Klemme auf Verschmutzungen der Linse.
Nur wenn Staub vorhanden ist, entfernen Sie diesen mit einer ölfreien weichen Bürste oder einer Objektiv-Blasebürste vom Objektiv. Berühren Sie die Kamera nicht weiter.
 | Hinweis! Sollten Sie Wasser- oder Ölflecken auf der Linse entdecken, wenden Sie sich bitte an den Kundendienst, bevor Sie versuchen, diese zu entfernen. |
|---|
Reinigung der Sensoren
Führen Sie für jeden der Sensoren in der Liste unten die folgenden Schritte aus:
Entfernen Sie vorsichtig den Staub vom Sensor mit einem Staubpinsel
Reinigen Sie die Abdeckungen vor den Sicherheitslaserscannern, um zu verhindern, dass Staub und Spinnweben die Laserscanner behindern.
Befeuchten Sie ein sauberes, fusselfreies Reinigungstuch mit lauwarmem Wasser und einer kleinen Menge antistatischem Kunststoffreiniger
Reinigen Sie den Sensor vorsichtig mit dem Tuch. Wenden Sie so wenig Kraft wie möglich an, um den Sensor nicht aus seiner Position zu bewegen.
Liste der zu reinigenden Sensoren:
Sicherheits-Laserscanner (3x).
Lichtvorhänge (8x).
Navigationskameras (2x)
Saugen von SOTOs Innenraum
Entfernen Sie vorsichtig Staub und Schmutz aus dem Inneren des Roboters mit einem Staubsauger. Achten Sie darauf, die Sensoren nicht mit dem Staubsauger zu berühren.