
Betrieb
Automatischer Modus
SOTO 2.1 ist ein autonomer Roboter und arbeitet hauptsächlich im Automatikmodus. Der Roboter erhält seine Aufträge selbständig über das bereits bestehende System und bearbeitet sie. Ein Eingriff durch geschultes Personal oder eine Fachkraft ist nur im Falle einer Störung erforderlich.
Lichtsignale im automatischen Modus
Weißes Licht pulsiert | Weißes Licht blinkt | Eine Seite weiß und die andere rot | Rotes Licht blinkt |
|---|---|---|---|
 |  |  |  |
SOTO ist in Bereitschaft und wartet auf Sammeltransportaufträge. | Der Pfad ist blockiert. | SOTO zeigt mit dem weißen Licht die Fahrtrichtung an. | SOTO hat einen Fehler. |
Eine Seite weiß und die andere blinkt gelb | Gelbes Licht blinkt | Grünes Licht pulsiert | Grünes Licht konstant |
|---|---|---|---|
 | |  | |
SOTO zeigt eine Kurvenfahrt an. | SOTO interagiert mit einer Übergabestation. Der Lichtvorhang vor der Übergabestation ist stummgeschaltet. | SOTO wird aufgeladen. | SOTO ist vollständig aufgeladen. |
Akustische Signale im automatischen Modus
Summer: Der Summer gibt ein Signal, wenn eine Schutzfeldverletzung des kleinsten Feldes auf dem virtuellen Bumper auftritt oder ein Lichtvorhang verletzt wird, während kein Not-Halt-Taster gedrückt ist.
Lautsprecher: Der Roboter hat einen Lautsprecher, der derzeit nicht benutzt wird.
Manueller Betrieb
Der Roboter kann auf zwei Arten manuell gesteuert werden. Die Bewegung des Roboters kann über einen Controller erfolgen. Bei Verwendung eines Controllers bleibt die Sicherheitssteuerung immer aktiviert.
Wenn der Roboter deaktiviert ist, können Hubrollen angebracht werden, damit der Roboter geschoben werden kann.
Bedienung mit einem Controller
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Gefahr! Unfallgefahr! SOTO kann außerhalb des Arbeitsbereichs im manuellen Modus gefahren werden. Als Betreiber sind Sie für die Sicherheit während des gesamten Betriebs von SOTO mit dem Steuergerät verantwortlich. |
|---|
 | Hinweis! Beschädigungsgefahr! Im manuellen Modus kann der Roboter gegen Hindernisse gefahren werden, die von den Laserscannern nicht erkannt werden. Fahren Sie nicht gegen Hindernisse. Achten Sie immer auf einen ausreichenden Abstand nach oben, damit der obere Laserscanner nicht beschädigt wird. |
|---|
Manueller Betrieb des Roboters mit dem Controller
SOTO kann manuell verfahren werden, indem man den Roboter in den manuellen Modus wechselt.
Montageposition des Controllers
SOTO kann mit einem handgehaltenen Controller ferngesteuert werden. Der Regler ist in einer Halterung in der Rückwand der Fahrbasis untergebracht.

Anleitung zur Verwendung des Controllers
SOTO mit dem Controller steuern und bewegen
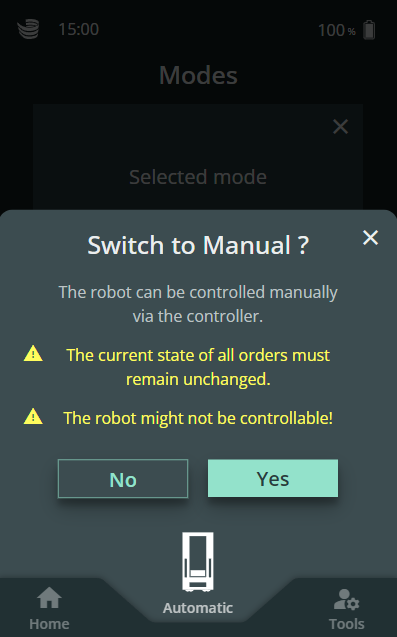
| 1 | Ändern Sie die Betriebsart von SOTO auf manuell:
|  |
| 2 | Wählen Sie "Ja", um zu Manuell zu wechseln. ⚠️Wenn sich noch aktive Sammeltransportaufträge im Backpack befinden, ändern Sie bitte nicht den Zustand und die Position der Ladungsträger. | 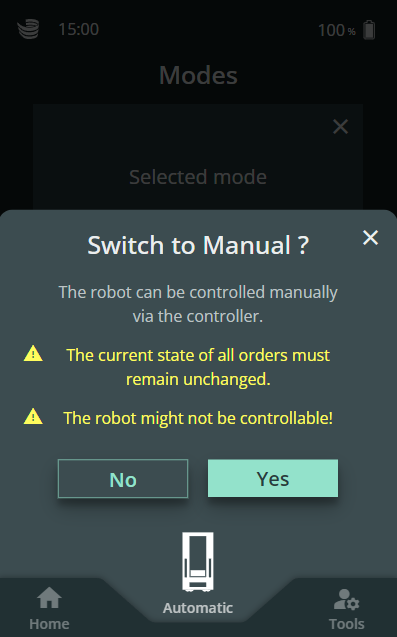 |
| 3 | Nehmen Sie den Controller aus der Halterung. Hinweis! Der Controller befindet sich unterhalb des Rucksackregals. Um das Auslösen des Lichtvorhangs zu vermeiden, entfernen Sie bitte den Controller von der Außenseite des Rucksackregals. |  |
| 4 | Die Verbindung kann nun über die Schaltfläche "Start" hergestellt werden.2️⃣auf dem Controller. | 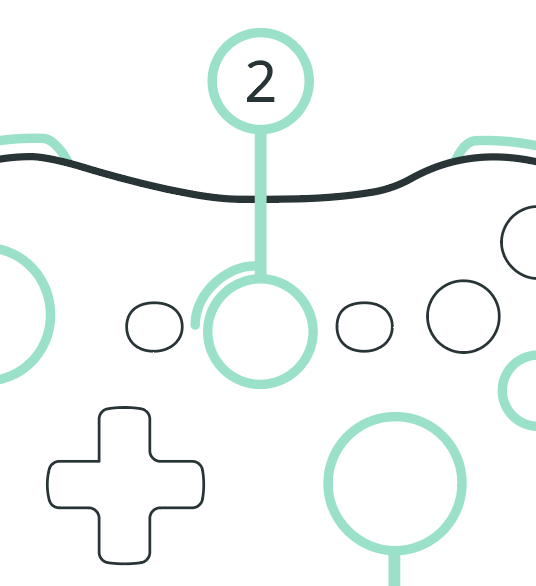 |
| 5 | Wenn die Verbindung erfolgreich war, erscheint ein Controller-Symbol in der Kopfzeile des SOTO-Displays.
| .png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) |
| 6 | Nachdem Sie den Roboter an die gewünschte Stelle manövriert haben, trennen Sie den Controller und legen ihn in seine Halterung zurück. Vergewissern Sie sich beim Verstauen des Controllers, dass er wieder sicher in der Halterung einrastet. Um den normalen Betrieb wieder aufzunehmen, schalten Sie SOTO wieder in den automatischen Modus. | 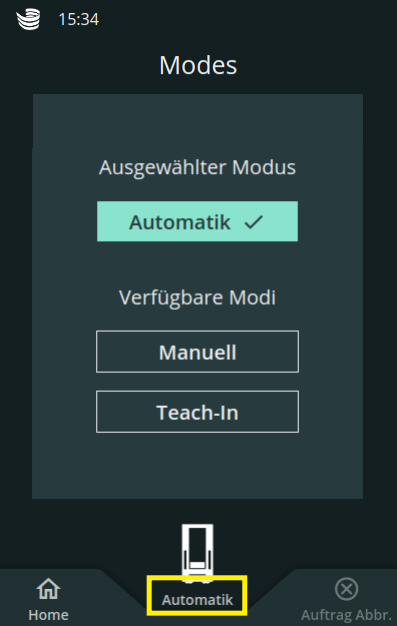 |
Vergessen Sie nicht, SOTO wieder in den automatischen Modus zu schalten.
Anleitung zur Verwendung des Controllers - Tasten & Konfigurationen
Der Roboter kann nun mit dem Controller gesteuert werden. Navigieren Sie den Roboter zu seiner gewünschten Zielposition.
Die Standardgeschwindigkeit des Roboters ist auf 0,3 m/s eingestellt.
Nicht alle Tasten des Controllers sind belegt.
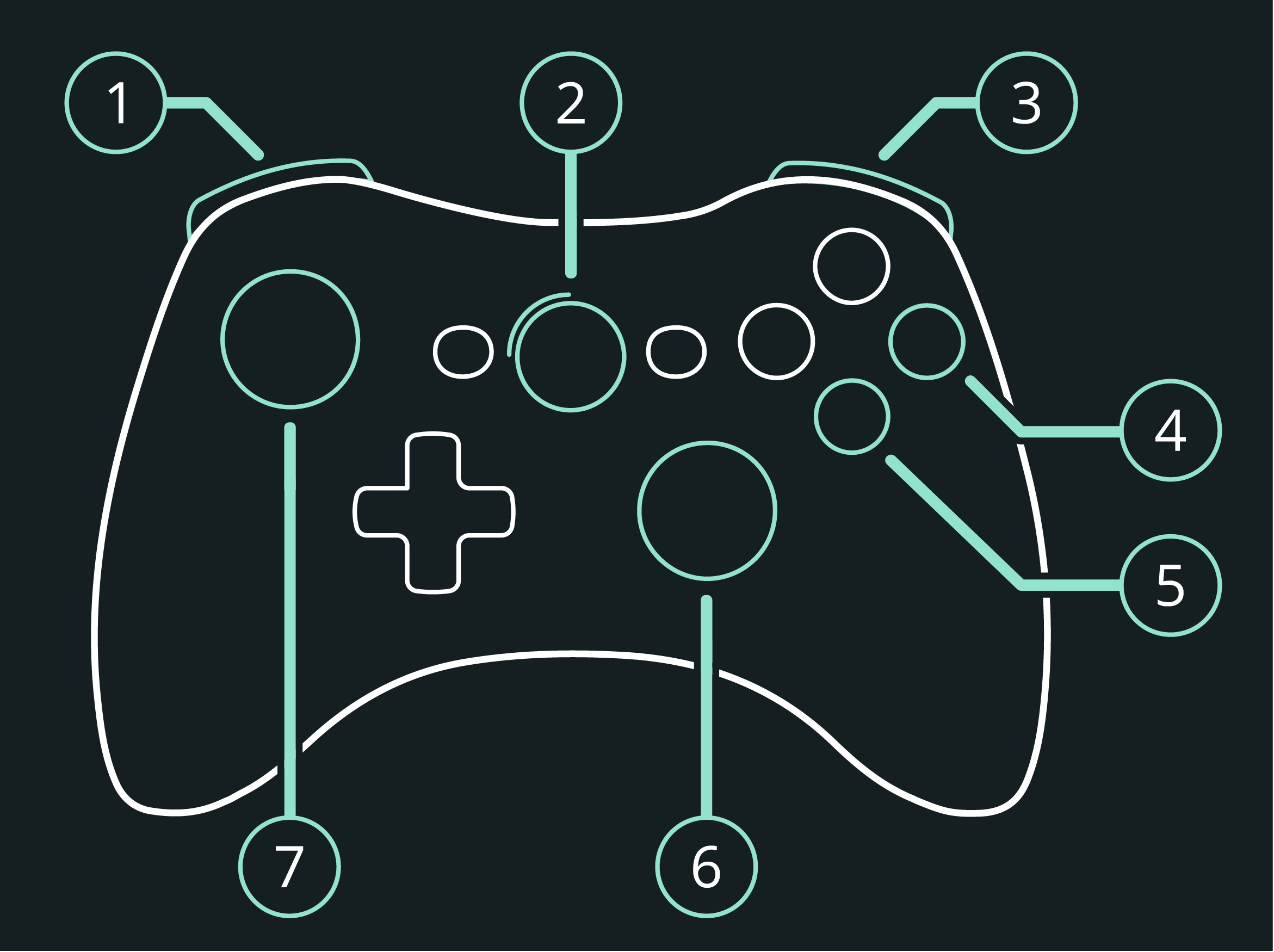
Schaltfläche | Funktion |
|---|---|
| Reduzierte Geschwindigkeit: Der Roboter reduziert seine Geschwindigkeit auf 0,05 m/s
|
| ⚠️Das Licht zeigt die erfolgreiche Verbindung an. Drücken Sie einmal, um den Controller zu starten. |
| Maximale Geschwindigkeit: Der Roboter beschleunigt auf 1,5 m/s
|
| Rucksackregalbedienung: Kippt den Rucksack nach vorne. |
| Rucksackregalbedienung: Kippt das Rucksackregal nach hinten. |
| Rotationssteuerung: Ändert die Orientierung des Roboters durch Drehen um seinen Mittelpunkt. |
| Bewegungssteuerung: Bewegt den Roboter in X- und Y-Richtung, ohne seine Orientierung zu verändern |
Fahren Sie immer mit reduzierter Geschwindigkeit, wenn Sie den Roboter in die Nähe von Hindernissen bewegen, die von den Laserscannern nicht erkannt werden können - insbesondere die Ladestation.
Die Schutzfelder bleiben im manuellen Modus aktiv. Der Roboter reduziert automatisch seine Geschwindigkeit, wenn die Schutzfelder durch umliegende Hindernisse verletzt werden. Beachten Sie, dass die unteren Laserscanner nur Hindernisse in 0,12 m Höhe erkennen.
Tipps für eine bessere Erfahrung
Versuchen Sie, den USB-Dongle in einen offenen Anschluss zu stecken → wenn sich der Anschluss innerhalb des Metallgehäuses befindet, kann dies die Signalstärke beeinträchtigen.
Versuchen Sie, den Abstand während der Roboter-Steuerung kurz und frei von Hindernissen zu halten.
Vergewissern Sie sich, dass die Batterie des Controllers nicht nahezu leer ist. Eine niedrige Batteriespannung erhöht die Verzögerung beträchtlich.
Fehlerbehebung
Wenn Sie sich im Manuell Modus befinden und der Roboter sich weigert zu fahren, schalten Sie zurück in den Modus Automatisch. Bestätigen Sie den Fehler (falls es einen gibt), lassen Sie die Motoren eine Referenzfahrt ausführen. Gehen Sie dann zurück in den Manuell Modus, um den Roboter zu bedienen. Bitte überprüfen Sie den obigen Abschnitt, um ein komfortables Fahrerlebnis zu haben.
Sollten Sie während der Arbeit etwas bemerken oder entdecken, das nicht in dieser Anleitung beschrieben ist, kontaktieren Sie bitte MAGAZINO unter http://support.magazino.eu.
Verwendung des Touch-Displays
Das Display hat mehrere Funktionen.
Informationen zum SOTO-Roboter und seinen Aufträgen können im automatischen Modus abgerufen werden.

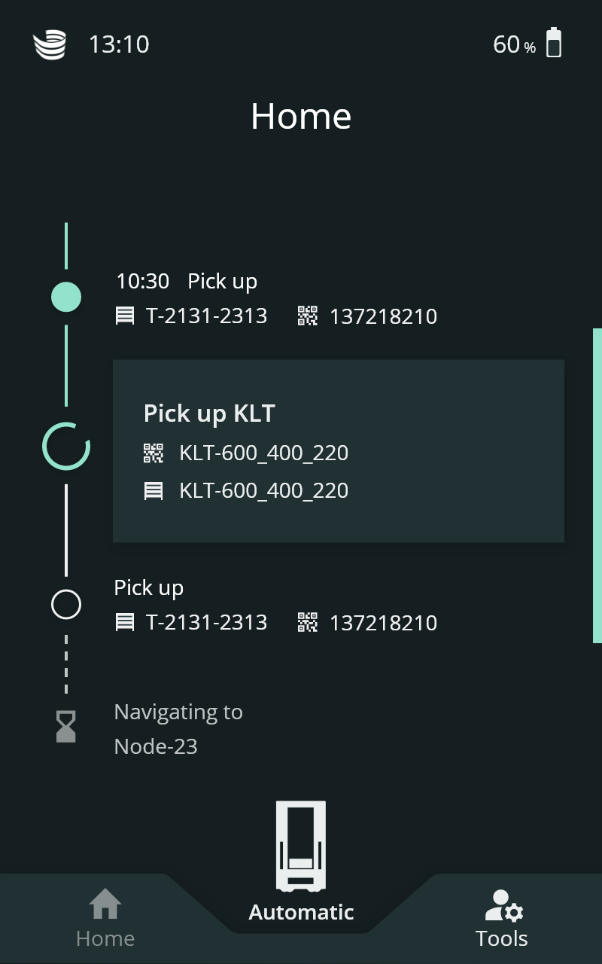
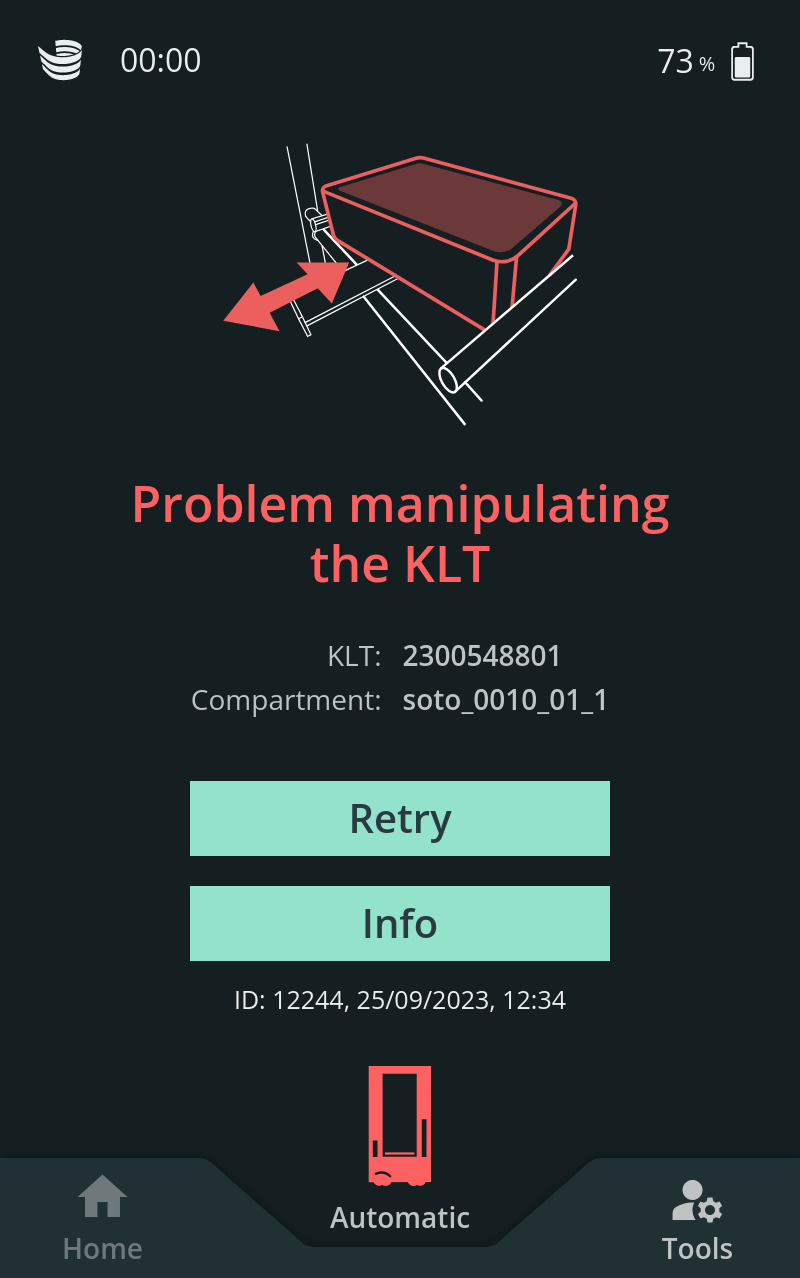
Im Falle einer Störung zeigt das Display an, wie Sie die Störung beheben können.
Das Display kann auch dazu verwendet werden, den Roboter in den manuellen Modus und vom manuellen Modus zurück in den automatischen Modus zu schalten.
Weitere Informationen zum SOTO Display finden Sie in der Dokumentation zur SOTO Display-Schnittstelle.
Not-Halt-Taster verwenden
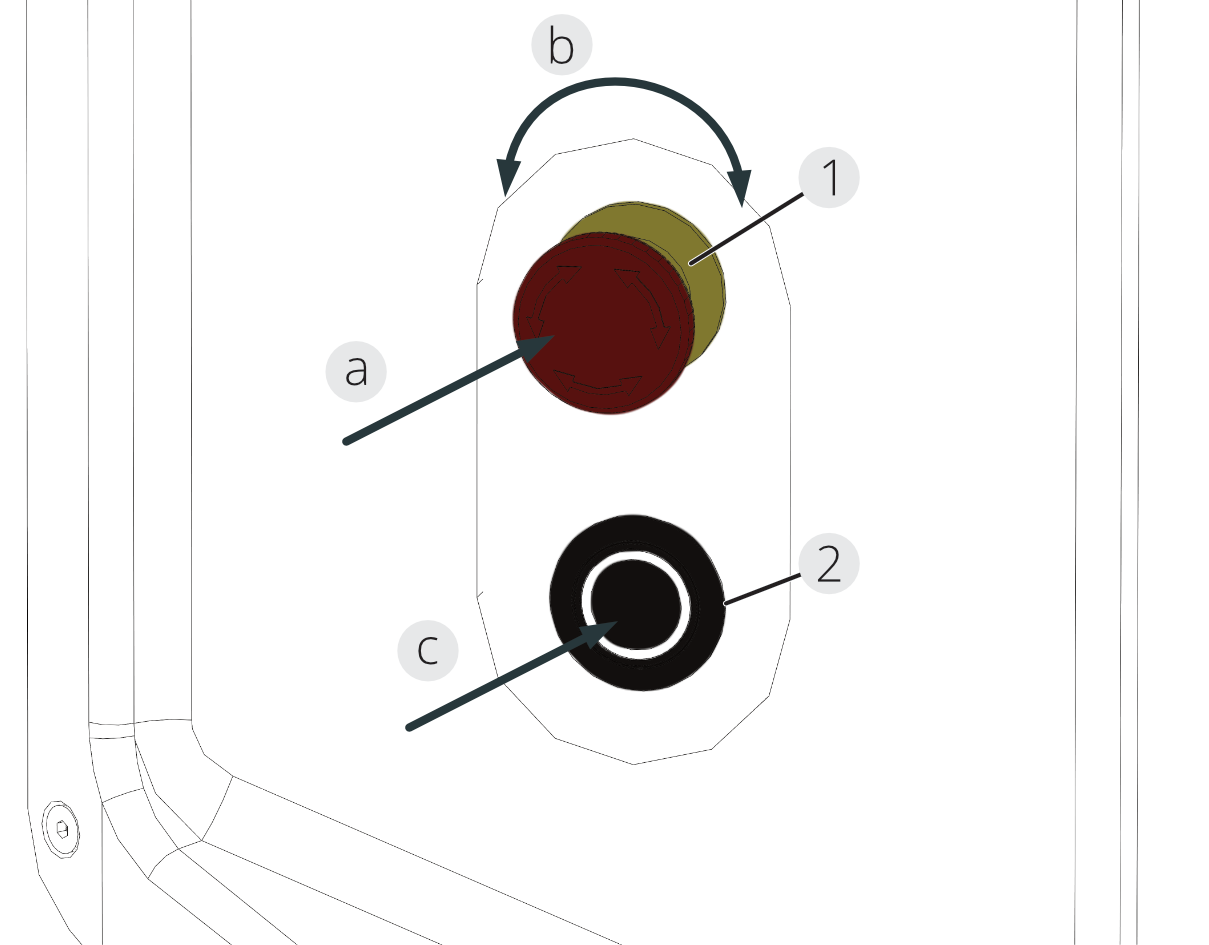
1) Not-Halt-Taster, 2) Drucktaster
Die Not-Halt-Taster dienen dazu, Unfälle und Schäden am Roboter zu vermeiden. Durch Drücken eines Not-Halt-Tasters werden alle Bewegungen des Roboters sofort gestoppt.
Drücken Sie (a) den Not-Halt-Taster (1). Der Roboter stoppt alle gefahrbringenden Bewegungen. Entriegeln Sie den Not-Halt-Taster, um den Roboter wieder in Betrieb nehmen zu können. Drehen Sie (b) den Not-Halt-Taster in eine beliebige Richtung, bis der Taster entriegelt ist. Drücken Sie (c) den Drucktaster (2), um den Roboter wieder in Betrieb zu nehmen.
Betrieb mit Hubrollen
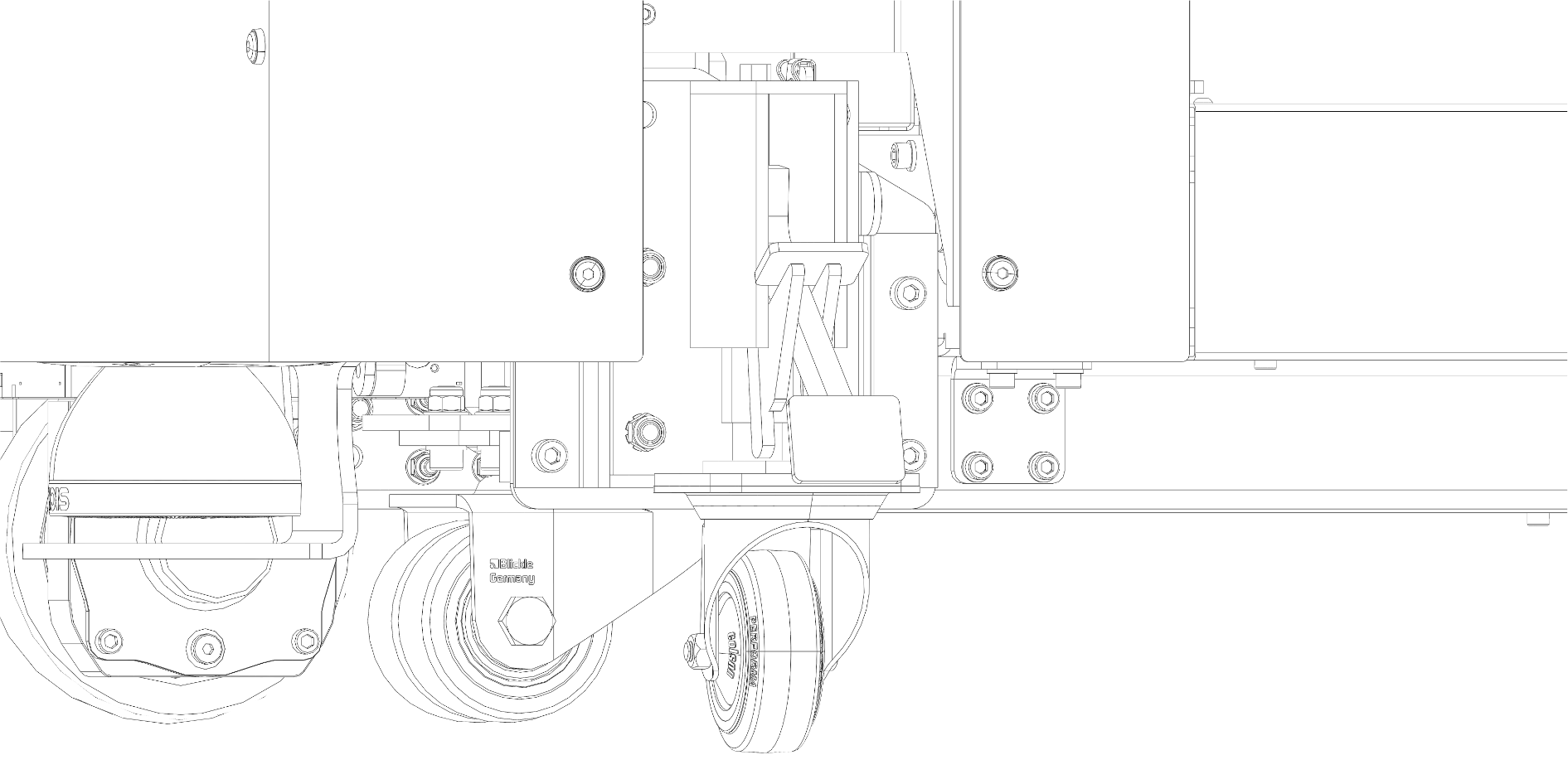
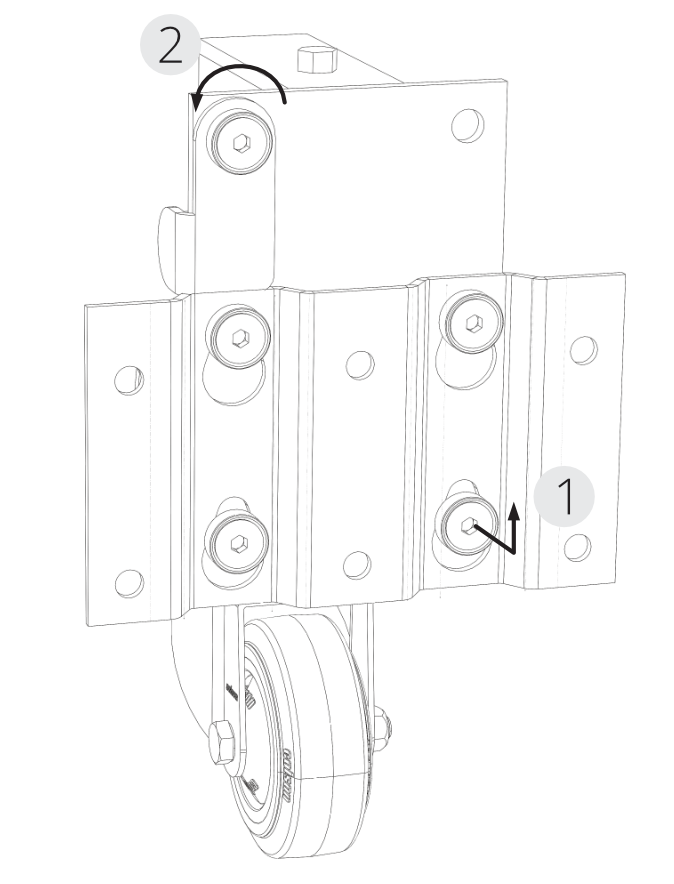
1) Führung, 2) Sicherung
Die Hubrollen werden in einen Schnellverschluss (1) eingehängt und von der Sicherung (2) in Position gehalten. Im aufgebockten Zustand wird die Hubrolle durch das Gewicht des Roboters gesichert.
Nachdem alle vier Hubrollen montiert sind, kann der Roboter durch Betätigen des Pedals aufgebockt und geschoben werden.
| Hinweis! Montierte Hubrollen verletzen das Schutzfeld des Roboters. Demontieren Sie alle Hubrollen, bevor Sie den Roboter in Betrieb nehmen. |
|---|
| Hinweis! Der Roboter kann beschädigt werden, wenn er schnell von den Hubrollen abgesenkt wird. Senken Sie den Roboter immer vorsichtig und kontrolliert ab. |
|---|