
Inbetriebnahme
Technische Daten
Physischer Fußabdruck (L × B) | 2146 × 1060 mm | Maximale Akkukapazität | 84 Ah |
Virtueller Fußabdruck (L × B) | 2430 × 1280 mm | Durchschnittliche Betriebsspannung | 51,2 V |
Höhe (in Betrieb) | 2240 mm | Leergewicht | 733 kg – 777 kg 741 kg bei Standardkonfiguration des Rucksackregals |
Maximale Geschwindigkeit | 1,5 m/s | Höchstgewicht pro KLT | 20 kg |
Maximale Akkulaufzeit | Bis zu 8 Stunden | Maximale Nutzlast | 207 kg – 251 kg 243 kg bei Standardkonfiguration des Rucksackregals |
Ladedauer | 1.6 Stunden | Maximale Akkukapazität | 84 Ah |
Einschalten des Roboters
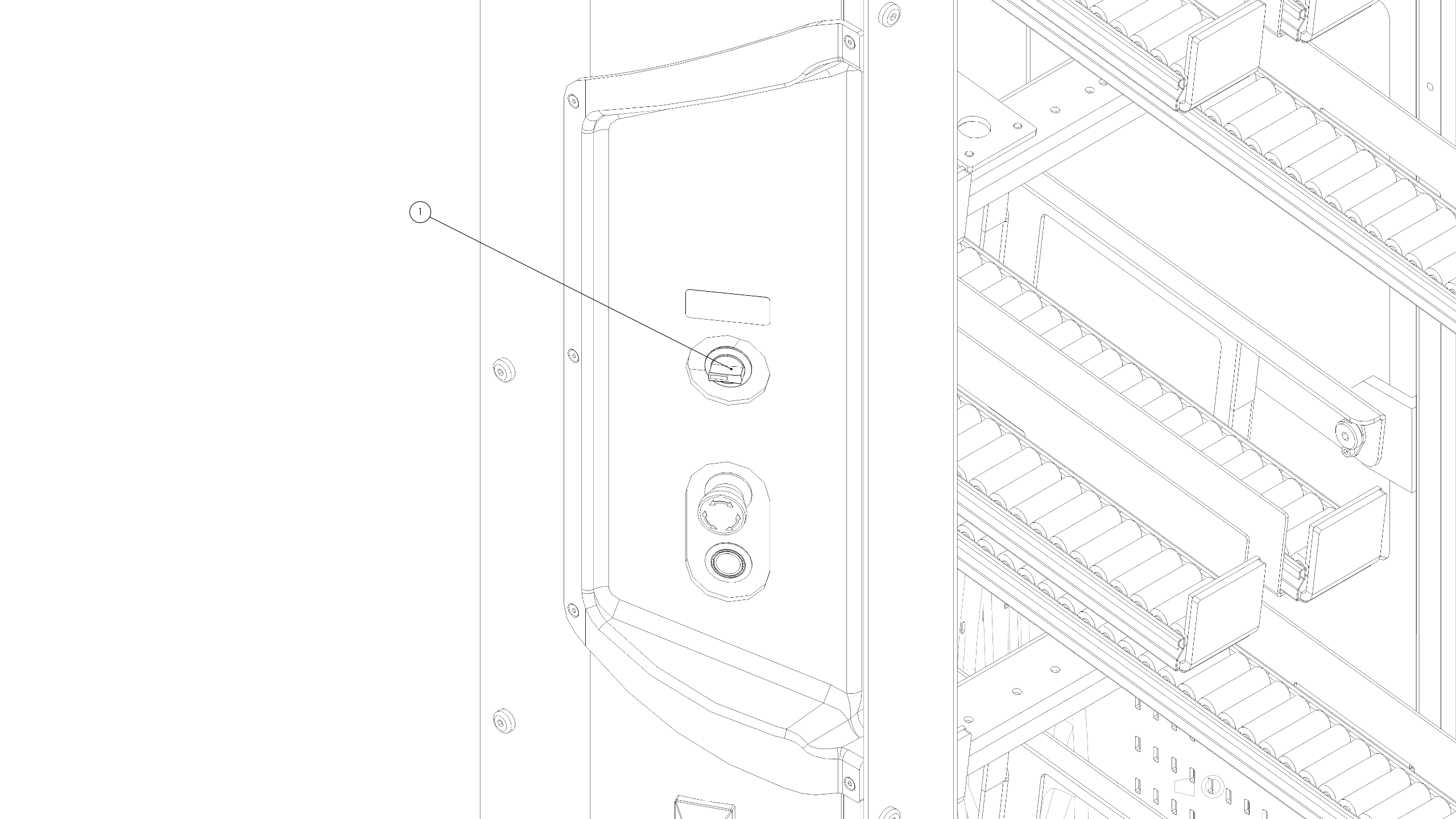
POSITION | BESCHREIBUNG | TEILENUMMER |
1 | Netzschalter | 1018517 |
SOTO 2.1 wird über den Hauptschalter auf der linken Rückseite des Rucksacks eingeschaltet. Optional kann der Netzschalter auch als Schlüsselschalter ausgeführt werden, so dass der Roboter im Falle einer Wartung gegen Wiedereinschalten gesichert werden kann.
Drehen Sie den Hauptschalter (1) im Uhrzeigersinn.
Richtungsangaben
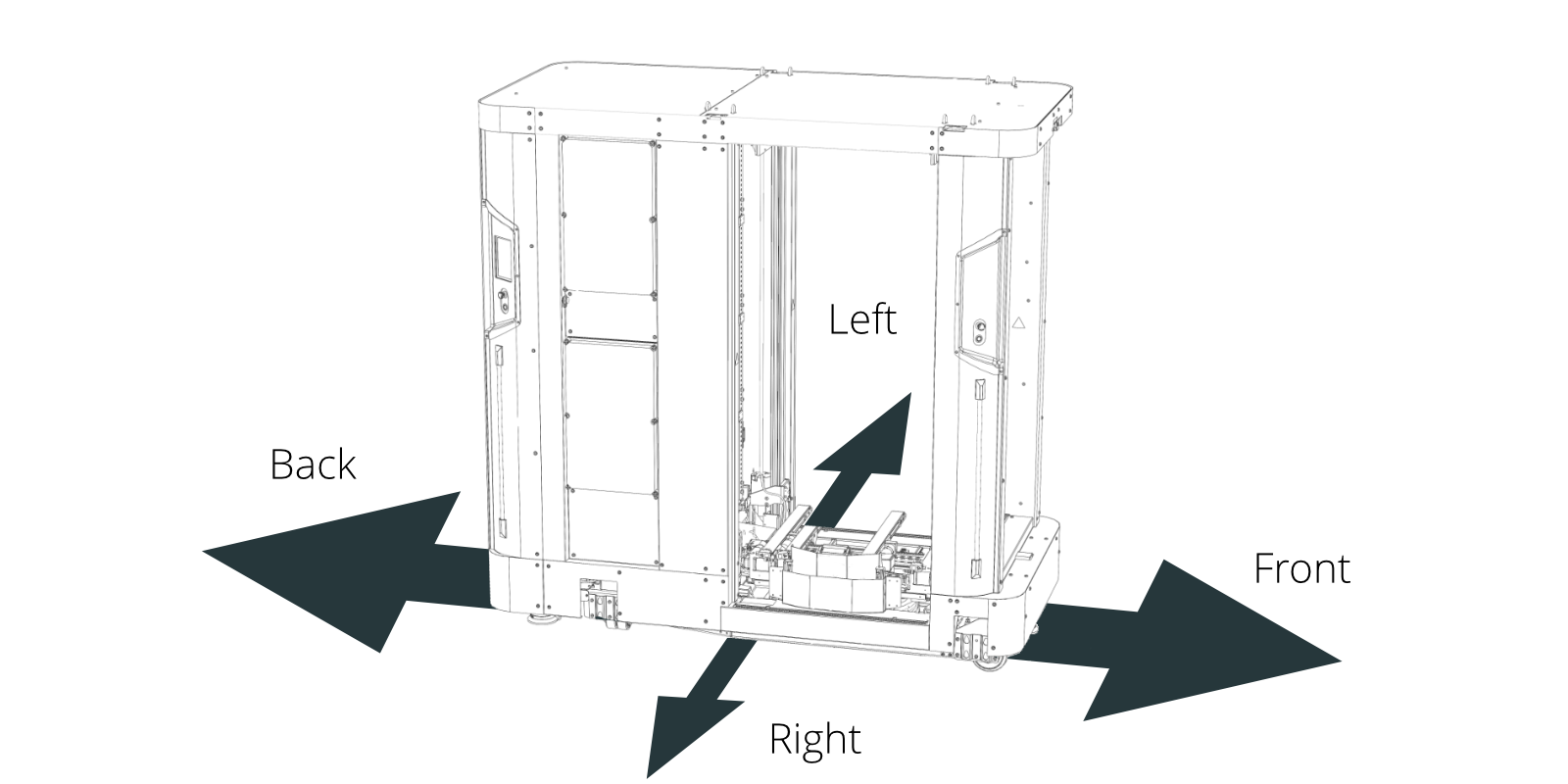
SOTO 2.1 hat einen omnidirektionalen Antrieb. Die Hauptfahrrichtungen nach vorne und hinten verlaufen entlang der Längsachse, die Nebenfahrrichtungen nach links und rechts entlang der Querachse des Roboters.
Das Fahren mit hoher Geschwindigkeit ist nur in der Hauptfahrrichtung möglich. Die Fahrt in der Nebenrichtung ist nur mit der sicheren Geschwindigkeit erlaubt.
Arbeitsbereich erstellen
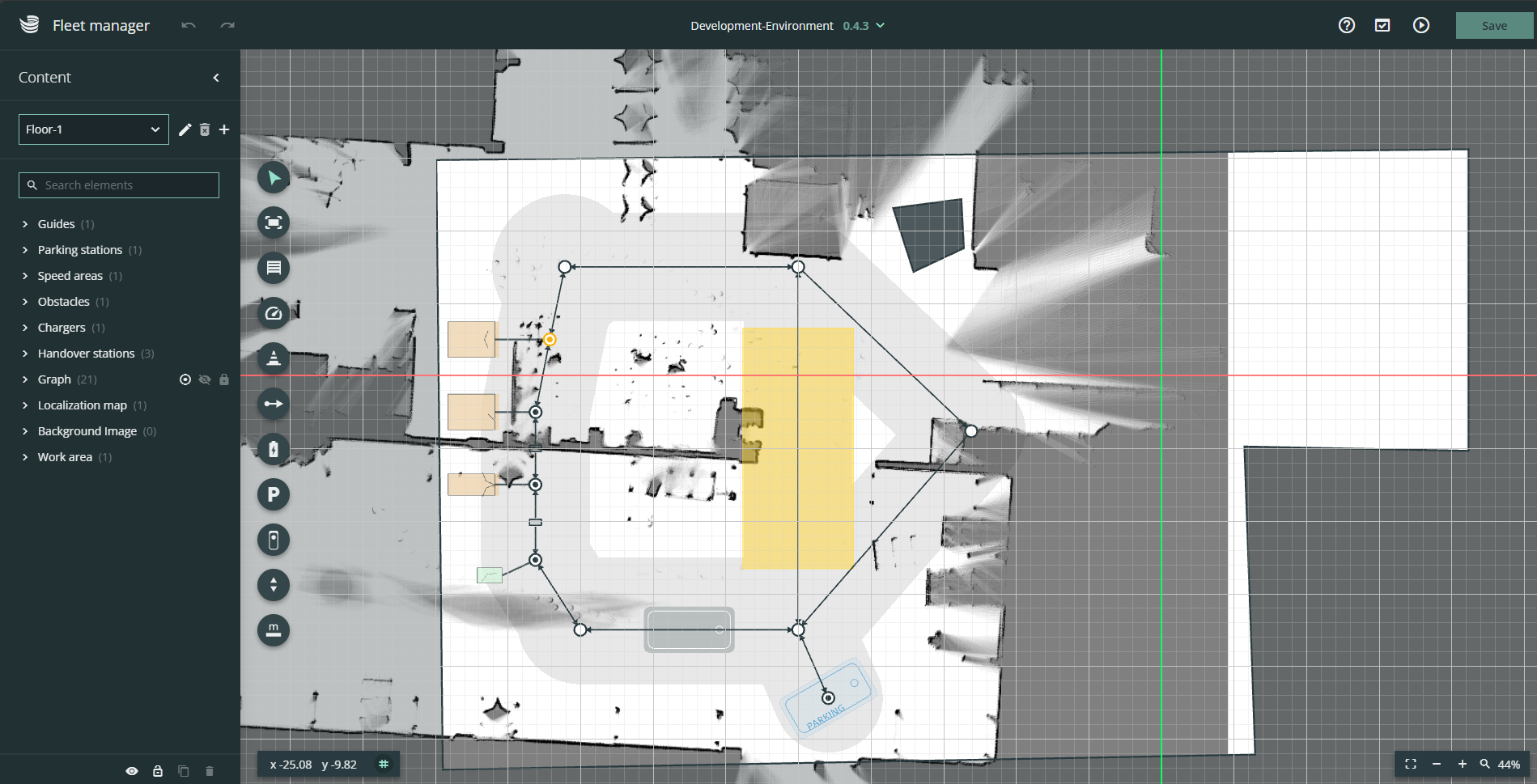
Damit der Roboter seine Arbeit aufnehmen kann, muss ein neuer Arbeitsbereich erstellt oder ein bestehender Arbeitsbereich auf den Roboter geladen werden.
Um einen Arbeitsbereich zu erstellen oder zu laden, folgen Sie den Anweisungen der "Environment Editor Bedienungsanleitung".