Sicherheit
Allgemeine Sicherheitshinweise
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Warnung! Verletzungsgefahr! Personen können von herabfallenden Ladungsträgern erfasst werden. Vermeiden Sie den Gefahrenbereich an Übergabestationen. |
|---|
| Warnung! Verletzungsgefahr! Im Falle eines Fehlers kann es notwendig sein, die Ladungsträger manuell aus dem Roboter zu entfernen. Halten Sie sich an die Empfehlungen für das sichere Heben und Tragen von Lasten. |
|---|
| Vorsicht! Verletzungsgefahr! Personen können durch das Durchlaufregal hindurchgreifen und bewegliche Teile des Greifers sowie den Ladungsträger erreichen. |
|---|
 | Hinweis! Laserklasse 1 nach DIN EN 60825-1:2003-10. |
|---|
Übersicht der Warnhinweise
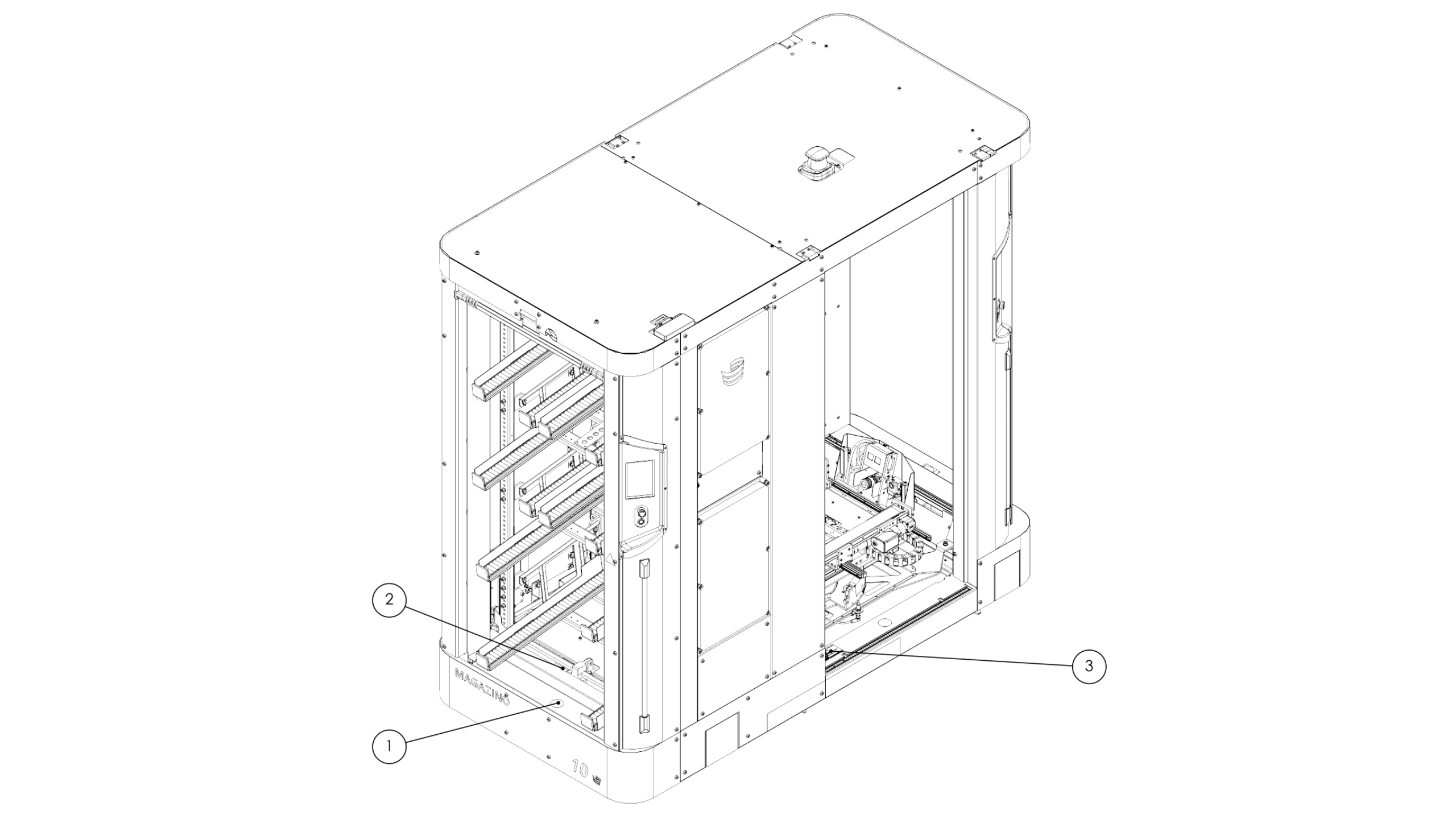
POSITION | TEILENUMMER | BESCHREIBUNG |
1 | 1013625 | Sticker ISO 7010 W024 |
2 | 1020161 | Sticker Inductive Charging Plate |
3 | 1020808 | Sticker - Forklift left 1/3 |
4 | 1020809 | Sticker - Forklift left 2/3 |
5 | 1020810 | Sticker - Forklift left 3/3 |
6 | 1013626 | Sticker ISO 7010 P024 |
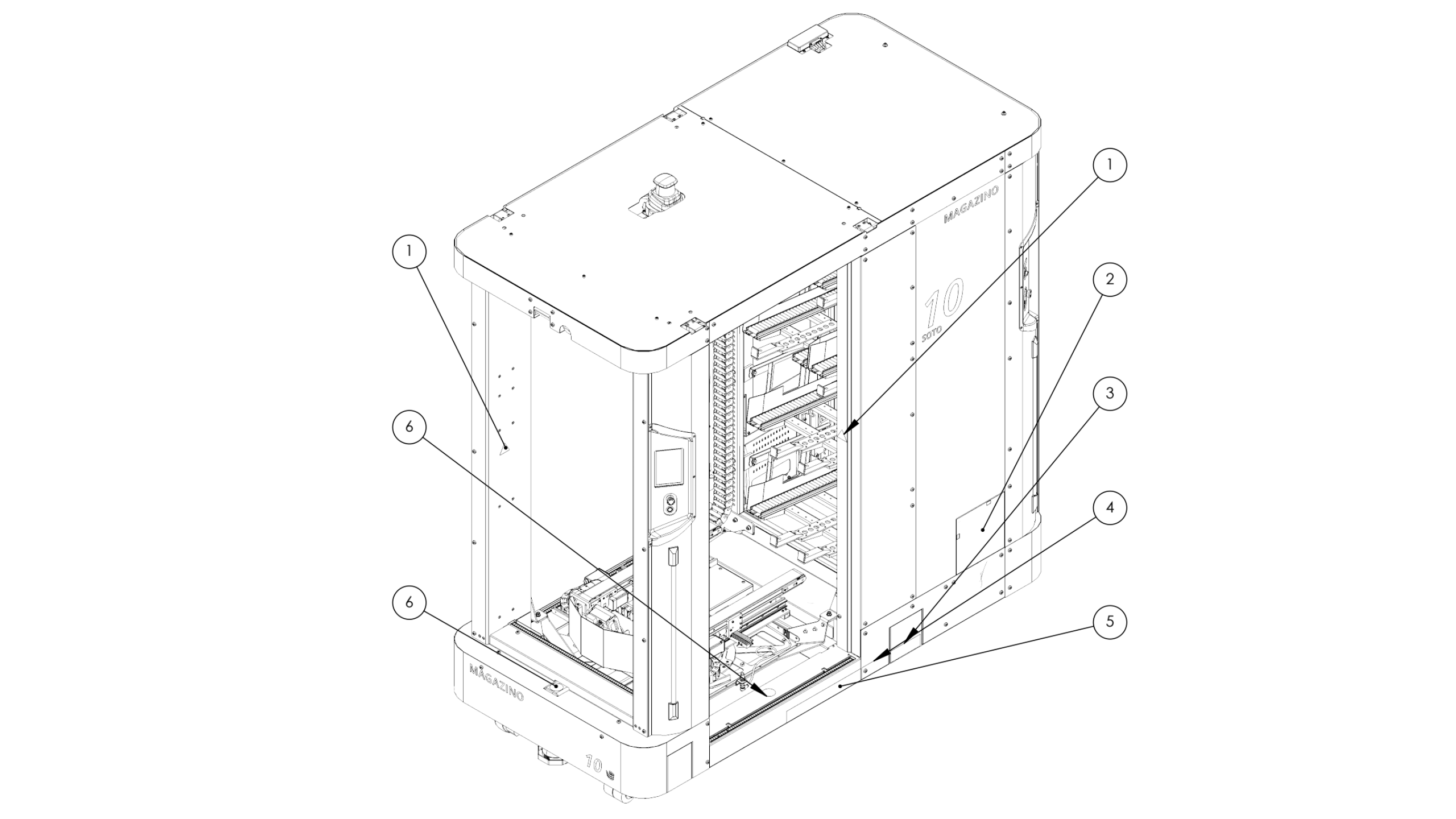
POSITION | TEILENUMMER | BESCHREIBUNG |
1 | 1013625 | Sticker ISO 7010 W024 |
2 | 1013626 | Sticker ISO 7010 P024 |
3 | 1020806 | Sticker - Forklift right 1/2 |
4 | 1020807 | Sticker - Forklift right 2/2 |
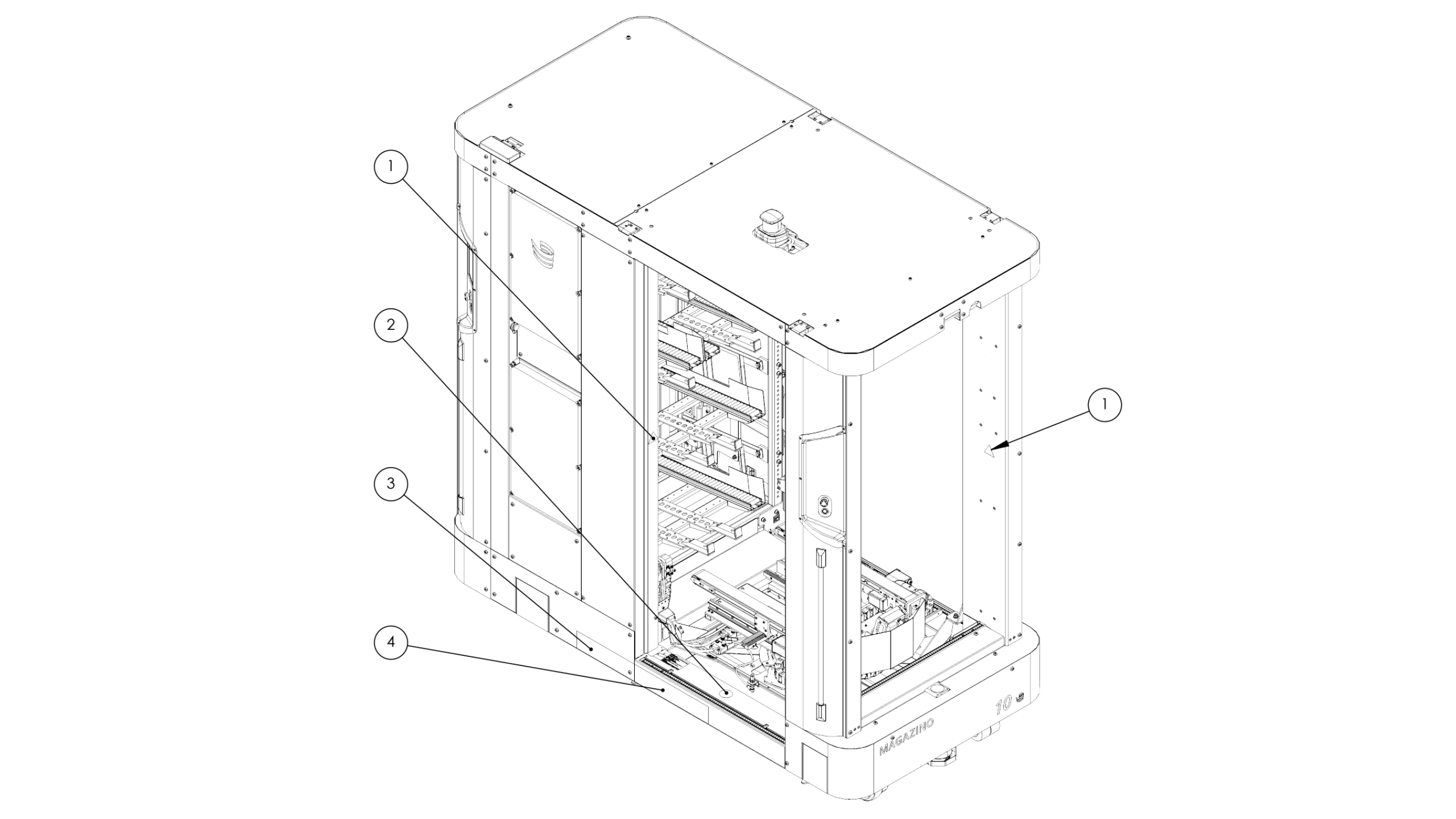
POSITION | TEILENUMMER | BESCHREIBUNG |
1 | 1013626 | Sticker ISO 7010 P024 |
2 | 1013635 | Typeplate Toru |
3 | 1018854 | Sticker Camera Warning symbol + Labeling (dark or light) |
POSITION | TEILENUMMER | BESCHREIBUNG |
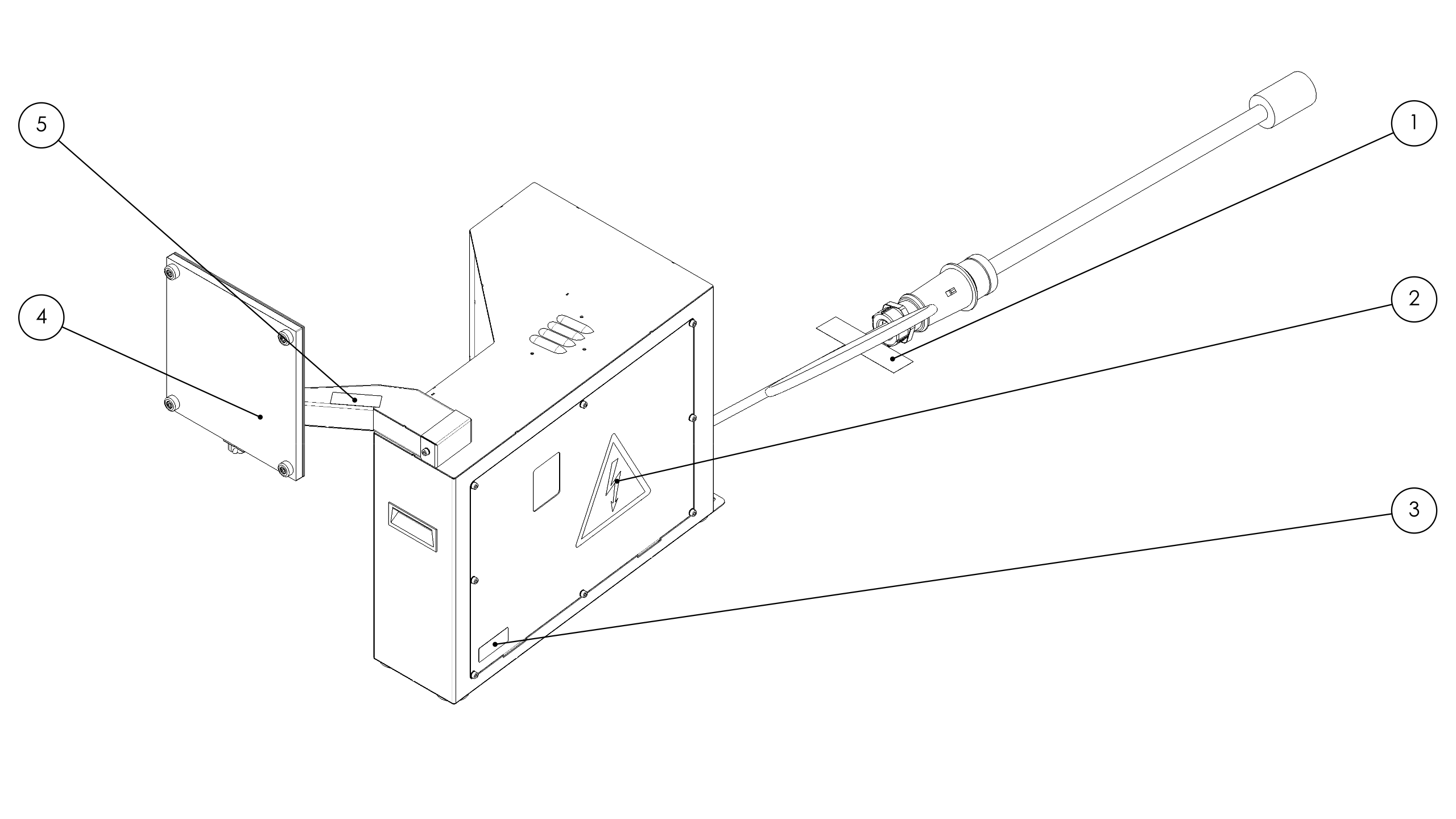
1 | 1020724 | Sticker - Warning charging station |
2 | 1020387 | Sticker Charger Door ISO 7010 W012 |
3 | 1010246 | Charging Station Nameplate |
4 | 1020702 | Sticker charging plate charging |
5 | 1020814 | Sticker - SOTO Charging Station |
Das Typenschild und der Hinweis auf den datenschutzkonformen Einsatz von Kameras beim Greifen befinden sich im unteren Bereich der rechten Öffnung am Roboter. Die Warnschilder, die auf eine mögliche Gefährdung von Händen und Fingern hinweisen, sind gut sichtbar an allen Seiten der Öffnungen angebracht.
| Hinweis! Der Roboter und das Ladegerät dürfen nur mit angebrachten Warnhinweisen betrieben werden. Kontaktieren Sie Magazino, wenn beschädigte oder entfernte Warnschilder ersetzt werden müssen. |
|---|
Sicherheitskonzept
Das Sicherheitskonzept des Roboters gewährleistet einen sicheren, autonomen Betrieb neben dem Menschen. Der Einsatz von bewährten Sicherheitskomponenten in Verbindung mit einer Sicherheitssteuerung sorgt dafür, dass sich der Roboter im automatischen Betrieb stets in einem sicheren Zustand befindet.
Die Not-Halt-Taster befinden sich an allen vier Seiten in Griffweite. Die Betätigung eines Not-Halt-Tasters führt zum sofortigen Stopp aller gefährlichen Roboterbewegungen.
Sicherheitslaserscanner werden zur Personenerkennung in der Haupt- und Nebenfahrtrichtung eingesetzt. Sie überwachen die verschiedenen Schutzfelder. Eine Verletzung eines Schutzfeldes zwingt den Roboter, seine Geschwindigkeit auf die sichere Geschwindigkeit von 0,3 m/s zu reduzieren. Eine Verletzung des Schutzfeldes (virtueller Bumper) führt zum sofortigen Anhalten des Roboters.
Sicherheitslichtvorhänge sichern alle Öffnungen des Roboters. Der Griff in den Rucksack oder in den Arbeitsbereich des Greifers führt zum sofortigen Stopp aller gefährlichen Roboterbewegungen.
Damit der Roboter mit einer Übergabestation interagieren kann, wird der angedockte Zustand an der Übergabestation erkannt und dann der entsprechende Lichtvorhang zur angedockten Seite hin deaktiviert.
Um den Roboter im Falle eines Stromausfalls bewegen zu können, müssen die Aufbockrollen angebracht werden. Der aufgebockte Roboter kann von zwei Personen sicher geschoben werden.
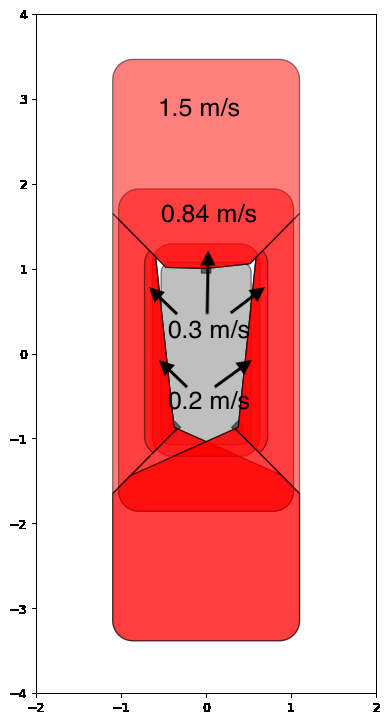
Laserscanner-Sicherheitskonzept
SOTO verwendet zwei angetriebene Lenkrollen. Jedes Rad kann sich um 360° drehen und vorwärts und rückwärts fahren. Die Fahrtrichtung wird unabhängig für jedes der beiden angetriebenen Lenkrollen mit Hilfe des Encoders gemessen. Der Encoder meldet direkt an die Sicherheits-SPS. Die Drehung des Encoders wird dann in 12 Segmente dekodiert, davon 6 mit 45° Grad (Fahrtrichtung links und rechts, max. zulässige Geschwindigkeit 0,3 m/s) und zwei Segmente, die in schnelle (Fahrtrichtung vorwärts und rückwärts, max. zulässige Geschwindigkeit 1,5 m/s) und mittlere (Drehen während der Fahrt, max. zulässige Geschwindigkeit 0,84 m/s) Geschwindigkeitssegmente beim Vorwärts- oder Rückwärtsfahren unterteilt sind. Die resultierenden Felder sehen wie folgt aus: