Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
Die Lichter von SOTO zeigen jetzt den Betriebsstatus an
Die Beleuchtung von SOTO wurde mit neuen Lichtsignalen ausgestattet, die den Betriebszustand anzeigen. Ein schwaches rotes Licht zeigt nun den normalen Betrieb an, während ein helles rotes Blinken einen Fehler anzeigt. Dadurch lässt sich der Status von SOTO im Live-Betrieb auch aus der Ferne schnell und einfach erkennen.
Sie können jetzt die Geschwindigkeit von SOTO mit dem Logitech-Controller steuern.
Drücken Sie die obere linke Taste auf der Rückseite des Controllers für langsame, präzise Bewegungen.
Drücken Sie die obere Rechts-Taste auf der Rückseite des Controllers, um mit bis zu 1,5 m/s schnell zu fahren.
Diese Tasten sind nicht durchgehend aktiviert, Sie müssen sie also während der Fahrt gedrückt halten.
Verwalten Sie Ihre SOTO-Flotte mit dem neuen Magazino Fleet Manager
Der Magazino Fleet Manager (MFM) ist eine cloudbasierte Anwendung, die das Management Ihrer Roboterflotte vereinfacht. MFM umfasst den früheren eigenständigen Umgebungseditor und den Auftragsmanager, die Kunden bisher zur Verfügung standen.
Hauptmerkmale:
Mit dem Environment Editor können Sie Roboter-Arbeitsbereiche entwerfen und modifizieren, indem Sie potenzielle Routen, Übergabestationen, Ladestationen und vieles mehr festlegen. Sie können den Arbeitsbereich leicht an sich ändernde Produktionsbedingungen anpassen.
Die Live-Ansicht verfolgt den Status jedes Roboters und Punkt in Echtzeit und gibt Ihnen einen umfassenden Überblick über Ihre Flotte.
Der Sammeltransportauftrag-Manager überwacht den Status aller Sammeltransportaufträge in Echtzeit und ermöglicht die manuelle Erstellung von Test-Sammeltransportaufträgen.
Die Flottenübersicht bietet Einblicke in die Kennzahlen des Betriebs, wie z. B. die Lebensdauer des Akkus und die Anzahl der Ladungsträger.
Benachrichtigungen halten Sie über Fehlermeldungen, Feueralarme und Karteneinsätze auf dem Laufenden und verbessern so das Bewusstsein für den Betrieb.
MFM wurde entwickelt, um die Effizienz Ihrer Roboterflotte zu steigern und das Management zu vereinfachen. Wir freuen uns auf Ihr Feedback, während Sie dieses neue Tool erkunden.
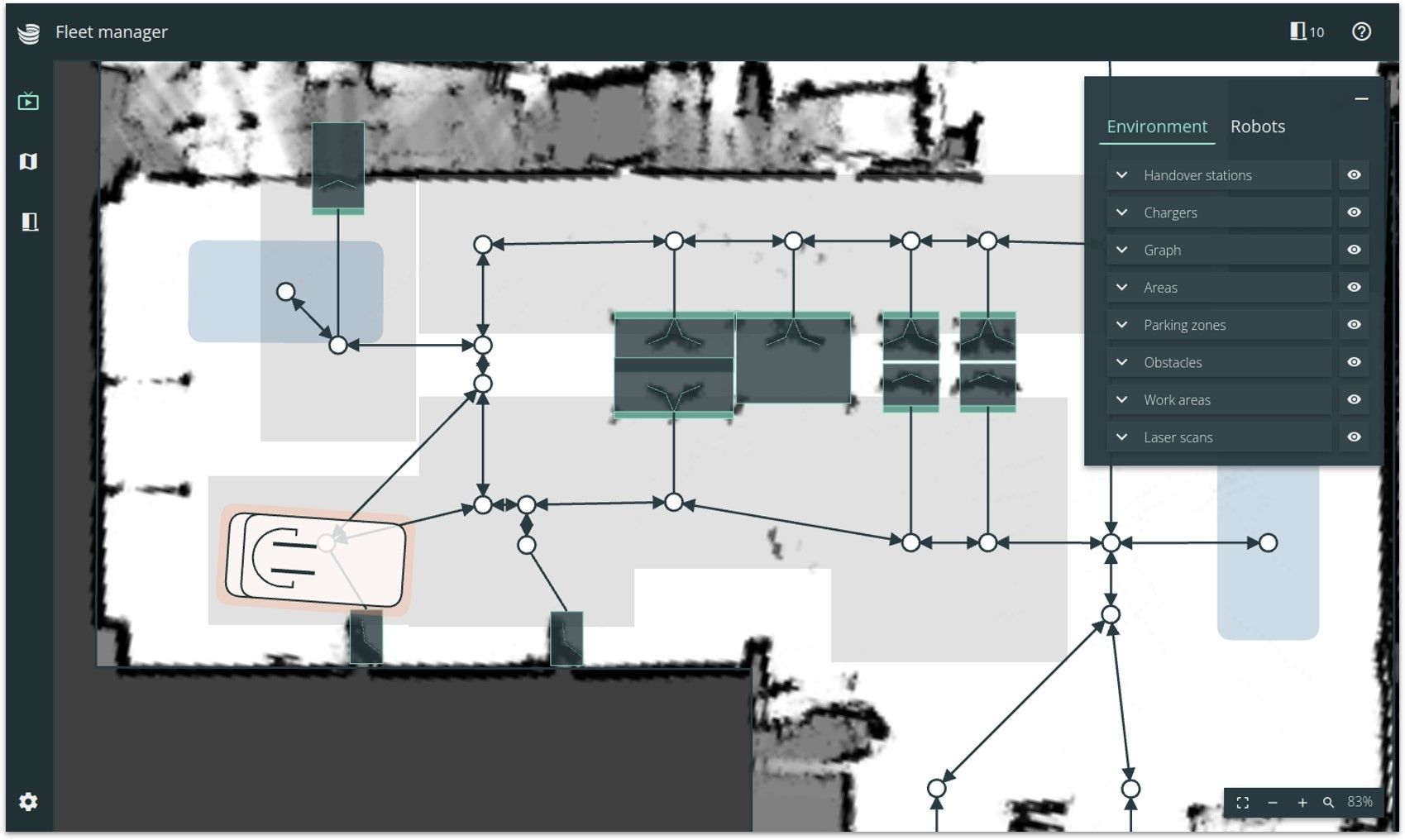
Live-Visualisierung der Laserdaten vereinfacht das Anpassen der Regale
Mit der neuen Live-Visualisierung der Laserdaten im Environment Editor (EE) lassen sich die Regalpositionen schnell und einfach anpassen.
So funktioniert es:
Klicken Sie im EE auf das Lasersymbol, um die Live-Visualisierung der Laserdaten einzuschalten.
Fahren Sie Ihr SOTO in die Nähe des Regals, das Sie anpassen möchten.
Klicken Sie auf die Lokalisierungskarte im linken Menü, um die Lokalisierungskarte einzusehen.
Schalten Sie zwischen dem oberen und unteren Laserscanner, um die Position der Andockformen auf dem Regal zu erkennen, je nachdem, wo sie sich befinden.
Ziehen Sie das Regal an die neue Position und betätigen Sie Speichern.
Auf diese Weise müssen Sie nicht den gesamten Raum neu gestalten, sondern sparen Zeit und vereinfachen den Prozess.
Vorschau von Zäunen beim Zeichnen neuer Knotenpunkte
Sie können jetzt eine Vorschau der Zäune in Echtzeit sehen, während Sie neue Knoten zeichnen. Dadurch können Sie sehen, wie die Zäune nach der Erstellung aussehen würden, und genauere Anpassungen vornehmen.
Mehrere Zäune gleichzeitig bearbeiten
Sie können nun die Zaunbreite für mehrere Knoten und Kanten gleichzeitig ändern. Das macht es einfacher, umfangreiche Änderungen an Ihrer Arbeitsumgebung vorzunehmen.
Zäune werden nun für ausgewählte Knoten und Kanten hervorgehoben
Der Umgebungseditor hebt jetzt Zäune für ausgewählte Knoten und Kanten in einer anderen Farbe hervor. Dadurch ist es einfacher zu sehen, welche Zäune mit einem bestimmten Knoten oder einer Kante verbunden sind.
Kartieren Sie Ihre Umgebung direkt auf dem SOTO-Display
Die Kartierung Ihrer Umgebung ist jetzt viel einfacher. Sie können Ihre Karte direkt auf dem Bildschirm des Roboters einsehen, indem Sie mit dem Controller navigieren und die Kartenaufzeichnung in Echtzeit betrachten. Sobald Sie fertig sind, wird die Karte automatisch in den Magazino Fleet Manager zur Umgebungsmodellierung hochgeladen.
Damit entfällt die Notwendigkeit, einen Laptop mit sich zu führen oder an einen separaten Computer anzuschließen. Zeichnen Sie einfach Ihre Karte mit dem Roboter auf und schon können Sie loslegen!
Die SOTO-Lokalisierung wurde verbessert, um Abweichungen zu verringern
Die Lokalisierung von SOTO wurde verbessert, um Abweichungen zu reduzieren (ein Zustand, bei dem der Roboter denkt, dass er sich mehr bewegt als er tatsächlich tut). Diese Verbesserung macht SOTO genauer, wodurch die Abläufe in Ihrem Lager reibungsloser werden.
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
SOTO-Navigation unterstützt teilweise offengelassene Fahrwege in VDA 5050
Die Navigation von SOTO unterstützt nun auch teilweise offengelassene Aufträge nach VDA 5050 und verbessert damit die Koordination mehrerer Roboter (Multi-Robot-Koordination) und die Integration mit spezifischen Leitsteuerungen.
Derzeit unterstützte Funktionen:
Teilweise offengelassene Befehle (Navigation)
Vollständig offengelassene Befehle
Dichte Liste von Knoten (ohne Position)
Dichte Liste von Knoten mit Position (ohne Ausrichtung)
Dünne Liste von Knoten
Base/Horizont-Verarbeitung, einschließlich Warten auf die Freigabe einer Basis und Optimieren einer Basis für einen bekannten Horizont
Derzeit nicht unterstützte Funktionen:
Vollständig vordefinierte Navigation (dichte Liste von Knoten mit Ausrichtung auf Knoten und Kanten)
Begrenzung der Geschwindigkeiten auf Kanten
Bericht über den aktuellen Pfad im vollständig offengelassenen Modus
Die SOTO-Lokalisierung wurde verbessert, um Abweichungen zu verringern
Die SOTO-Lokalisierung wurde verbessert, um Abweichungen zu verringern Dies bedeutet, dass die Position des Roboters auch in komplexen Umgebungen genauer und zuverlässiger bestimmt werden kann.
Zu den Verbesserungen des Lokalisierungsalgorithmus gehören:
Verbesserte Positionierung: Es wurde eine Kreuzreferenzierung von Positionsdaten mit Daten des Laserscanners eingeführt. Dieser Ansatz ermittelt die genaue Position des Roboters präziser.
Erhöhte Fehlerresistenz: Der Algorithmus ist nun widerstandsfähiger gegen Fehler, was die Wahrscheinlichkeit verringert, dass der Roboter seine Orientierung verliert.
Diese Optimierungen ermöglichen eine präzisere Navigation des Roboters und führen somit zu einer signifikanten Steigerung der Gesamteffizienz in den Lagerabläufen.
Laserkalibrierung kann jetzt in Mag-CLI durchgeführt werden
Das Mag-CLI-Tool enthält jetzt eine neue Laserkalibrierungsfunktion. Dadurch können Sie die Laserscanner des Roboters kalibrieren, um Abweichungen, die während des Transports entstanden sind, auszugleichen.
Die neue Laserkalibrierungsfunktion umfasst die folgenden Merkmale:
Kalibrierung mit einem Befehl
Sie können jetzt die Laserscanner des Roboters mit einem einzigen Befehl in Mag-CLI kalibrieren.
Befehl: magcli hardware calibrate laser-scanners
Sie müssen die Schrauben immer noch manuell einstellen, um den Laserscanner zu positionieren.
Hochauflösende Darstellung
Der Roboter erstellt ein neues hochauflösendes Off-Screen-Rendering für die Ferninspektion. Sie können dieses Rendering auf Ihren PC herunterladen, um die Bilder vor und nach der Kalibrierung zu vergleichen.
Unabhängige Wiedergabe
Das Rendering kann auch unabhängig von der Kalibrierung erstellt werden. Dies kann für Debugging- oder Visualisierungszwecke nützlich sein.
Befehl: magcli take-picture laser-scanners
Verbesserte Bilderfassung für Front-Face-Tracking
Der Prozess der Bildaufnahme wurde verbessert, um sicherzustellen, dass die Bilder die richtigen Helligkeitsstufen für optimale Tiefendaten haben. Durch diese Verbesserung wird die Frontalverfolgung deutlich verbessert.
Für die Tracking-Funktion wurden die Ansichten der Ober- und Greiferkamera integriert. Dies ermöglicht genaue Abstands- und Winkelmessungen der KLTs, zwei entscheidende Aspekte für eine präzise Fördertechnik.
Neues Komponenten-Status "gripper_occupied"
Die Komponente „gripper_occupied“ wurde hinzugefügt. Dieser Status kann drei mögliche Werte annehmen: BESETZT, LEER und UNGEWISS.
Der Status „Gripper_occupied“ wird derzeit für zwei Zwecke verwendet:
Um zu prüfen, ob es erlaubt ist, in den manuellen Modus zu wechseln. Dies ist nur möglich, wenn der Greifer LEER ist.
Um zu bestimmen, ob der Szenen-Aggregator das, was er sieht, aggregieren soll.
Mehrere neue Befehle für Mag-CLI v3.0
Mag-CLI v3.0 wurde mit mehreren neuen Befehlen veröffentlicht. Um eine Liste aller Befehle zu sehen, geben Sie den folgenden Befehl ein:
CODE
$ magcli commands list
Darüber hinaus enthält Mag-CLI v3.0 auch benutzerspezifische Versionen.
Neue Befehle
Im Folgenden finden Sie einige der neuen Befehle, die in Mag-CLI v3.0 hinzugefügt wurden:
job create charging [charger_name] – Erstellt einen Ladeauftrag für das angegebene Ladegerät.
job create navigation [compartment_name] – Erstellt einen Navigationsauftrag.
job retry - Job-Wiederholung für problematische Jobs.
job unassign [robot_name] - Hebt die Zuweisung eines Jobs von einem Roboter auf.
job list - Listet alle aktiven und ausstehenden Aufträge auf einem Roboter auf.
display videos [robot_name] [N] - Zeigt die letzten N Manipulationsvideos für einen Roboter an.
take-picture [gripper-camera / laser-scanners] - Nimmt ein Bild mit der Greifer-Kamera oder den Laserscannern auf.
hardware readings [component] - Zeigt Hardware-Messwerte mit einem grafischen Messgerät an.
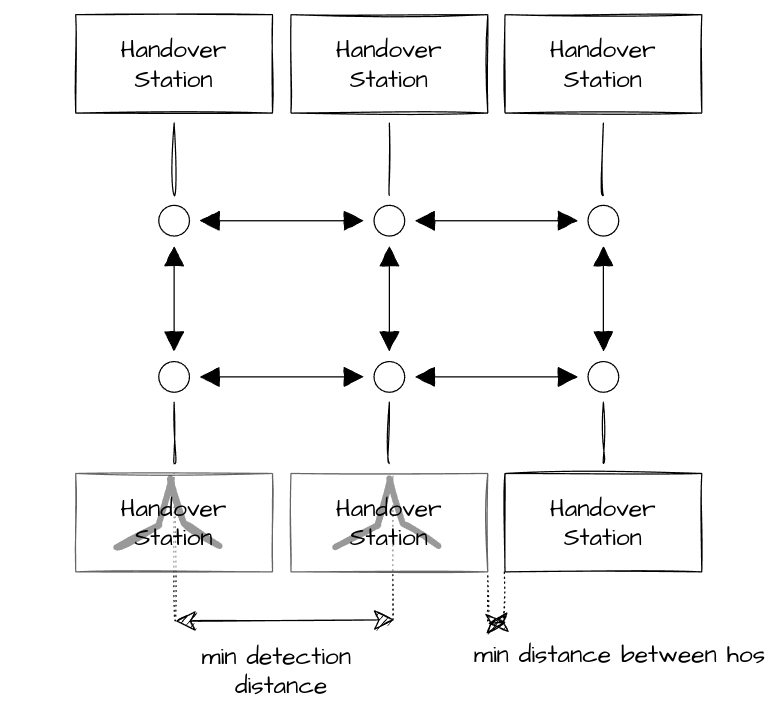
Direkte Verbindungen zwischen Übergabestationen
Mehrere Übergabestationen können auf engem Raum platziert sein, so dass ein Übergabebereich mit hoher Dichte entsteht. In diesen Fällen ist es möglich, die Knoten der Übergabestationen direkt über eine Kante miteinander zu verbinden. Dies verhindert, dass der Roboter auf zusätzlichen Knoten navigieren und drehen muss, was die Leistung des Roboters verringern kann.
Bei der Erstellung von direkten Verbindungen zwischen Übergabestationen ist es wichtig, die jeweiligen Einschränkungen der Andockrichtungen zu berücksichtigen. Eine Missachtung kann dazu führen, dass der Roboter eine 180-Grad-Drehung durchführen muss, falls eine Übergabestation eine spezifische Andockrichtung aufweist und die anderen nicht. Eine solche Drehung kann wiederum dazu führen, dass der Roboter die Zone verlassen muss, um einen geeigneten Platz zum Wenden zu finden.
Tipps
Wenn zwei Übergabestationen benachbart sind, verbinden Sie sie direkt mit einer Kante. Die Verwendung eines schmalen Zauns an dieser Kante hilft dem Roboter bei der Planung.
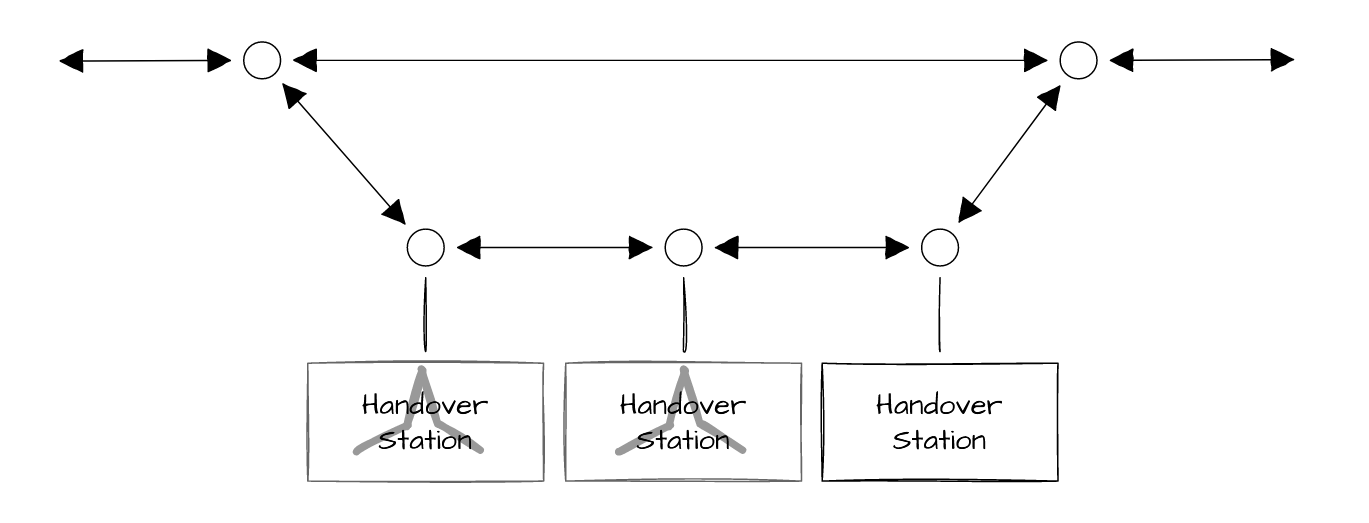
Wenn sich zwei Übergabestationen gegenüberliegen, verbinden Sie sie direkt mit einer Kante.
Achten Sie auf den Mindestabstand zwischen den Übergabestationen. Die Übergabestationen haben eine Mindestbreite und einen Abstand zwischen ihren Säulen und den Andockformen. Wenn sie zu nahe beieinander liegen, kann der Roboter sie nur schwer wahrnehmen und unterscheiden, was zu einer Leistungseinbuße führt.
Es wird empfohlen, eine ähnliche Andockrichtung für alle benachbarten Übergabestationen zu platzieren. Beachten Sie, dass sich die Andockrichtung bei gegenüberliegenden Übergabestationen umkehrt. Beispielsweise können die oberen Übergabestationen die Andockrichtung RECHTS erhalten, dann sollte die untere LINKS erhalten. Für aktive Hilfe verwenden sie die "Andockfläche anzeigen"-Funktion.
Fahren durch einen Bereich mit hoher Dichte
Der Roboter muss nicht immer an Übergabestationen andocken, sondern kann den Bereich einfach durchfahren. In diesem Fall ist es besser, eine parallele Fahrspur für den Roboter einzurichten, durch die er fahren kann.
Verbesserte Kollisionsvermeidung mit Top-Laserscanner
Hindernisse in der Ebene des oberen Laserscanners werden nun erkannt. Beispielsweise wird ein Warnhinweis generiert, wenn eine Box auf den Roboter gelegt wird.
Der Hindernisstatus des Laserfeld-Monitors wird auf "Blockierte Front" gesetzt, wenn ein Hindernis erkannt wird.
Die zulässige Geschwindigkeit entlang der blockierten Richtungen wird auf 0 gesetzt. Das Topic top_laser_retraction_state wird mit dem entsprechenden Richtungsstatus veröffentlicht.
Es werden keine Fähigkeiten gekürzt.
Eingezogene Laserscanner-Erkennung
Der Roboter erkennt jetzt, wenn der Laserscanner eingezogen ist:
Der Hindernis-Zustand des Laserfeld-Monitors wird auf "Retracted" gesetzt, wenn der Laserscanner eingezogen ist.
Die Geschwindigkeit wird nicht auf 0 gesetzt, sodass der Roboter noch manuell gefahren werden kann.
Das Topic top_laser_retraction_state wird mit dem Status „eingeklappt“ veröffentlicht.
Die Funktionen „can_navigate“ und „can_manipulate“ werden entfernt.
Die Architektur des Magazino Flottenmanagers
Der Magazino Fleet Manager (MFM) wird in Kubernetes gehostet, einem von Google verwalteten Kubernetes-Service. Kubernetes ist eine Abstraktionsschicht, die die einfache Verwaltung von Containeranwendungen ermöglicht. Dies gibt dem MFM die Flexibilität, verschiedene Projektszenarien zu unterstützen, z. B. Full VDA 5050 und proprietäre Middleware. Kubernetes bietet auch einen standardisierten Weg, Anwendungen zu hosten, unabhängig von der IT-Infrastruktur oder den Betriebssystemversionen. Dies bedeutet, dass Kunden den MFM vor Ort hosten können.
Kubernetes ermöglicht auch Upgrades und Rollbacks ohne Ausfallzeiten. Dies bedeutet, dass das MFM aktualisiert werden kann, ohne die Verfügbarkeit der Anwendung zu beeinträchtigen. Die gesamte Verwaltung erfolgt mithilfe des Prinzips "Infrastructure as Code".
Authentifizierung
Benutzer melden sich beim MFM mit Azure Active Directory-Konten an. Roboter authentifizieren sich mit Client-Zertifikaten.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.


.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
(1).png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
(1).png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
(1).png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)