Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
Bestimmte Funktionen auf dem SOTO-Display sind jetzt passwortgeschützt
Um die Sicherheit zu gewährleisten, können bestimmte Aktionen auf dem SOTO-Display nur nach Eingabe eines vierstelligen Passcodes ausgeführt werden. Die folgenden Aktionen sind passwortgeschützt:
Modus wechseln
Roboter zurücksetzen
Manuell abbrechen
Manuell abschließen
Roboter ausschalten
SOTO folgt dem topologischen Graphen besser
SOTO bevorzugt nun Navigieren auf der Kante und hält sich dabei eng an den im Umgebungseditor modellierten Graphen. Wenn ein Hindernis vorhanden ist, umfährt SOTO das Hindernis problemlos, indem der Roboter um das Hindernis herumnavigiert. Nachdem das Hindernis umfahren wurde, manövriert SOTO zurück zur Mitte der Kante, um sich optimal auszurichten.
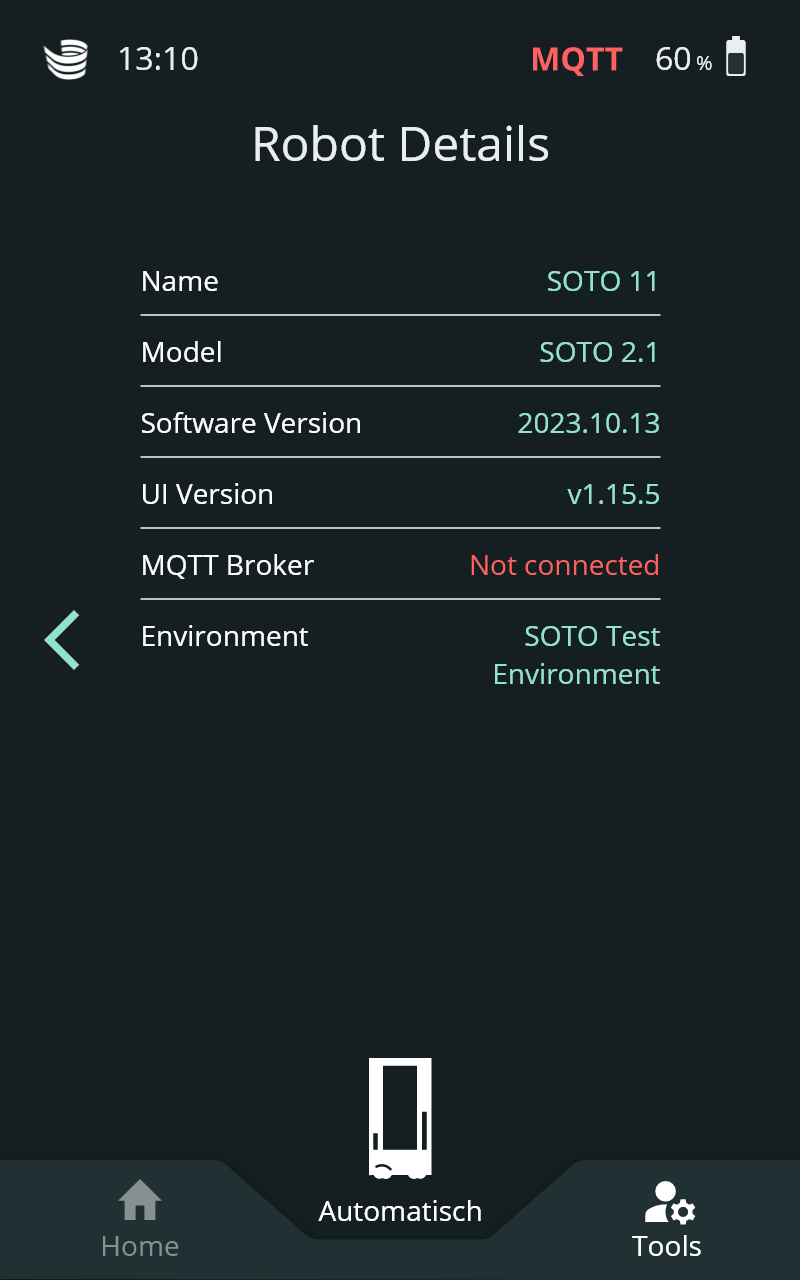
Das SOTO-Display zeigt den MQTT-Verbindungsstatus an
Das SOTO-Display zeigt nun den Verbindungsstatus zum MQTT-Broker in der rechten oberen Ecke an. Wenn der Roboter nicht verbunden ist, erscheinen die MQTT-Buchstaben in Rot. Wenn die Verbindung stabil ist, werden keine Buchstaben angezeigt. Der Verbindungsstatus wird auch im Abschnitt "Roboterdetails" des Display-Menüs angezeigt.
Die Reset-Taste zeigt den Mobilitätsstatus von SOTO an
Die Reset-Taste zeigt nun die Bewegungsfähigkeit des Roboters an. Wenn die Reset-Taste nicht leuchtet, kann sich der Roboter nicht bewegen. Wenn die Taste konstant leuchtet, bedeutet dies, dass sich der Roboter bewegen kann.
Verbesserte Objekterkennung auf Bodenebene
SOTO wurde so verbessert, dass er Objekte ab einer Mindesthöhe von 7 cm über einer ebenen Fläche erkennt, wodurch die Sicherheit in Environments mit niedrigen Hindernissen, wie z. B. Gabelstaplern, erhöht wird.
Optimierte KLT-Übertragung in die Regale
SOTO überträgt jetzt KLTs effizienter in die Regale. Der Roboter beginnt im oberen linken Fach eines Regals und bewegt sich Fach für Fach nach unten. Nach Abschluss eines Abschnitts geht es zum nächsten über und beginnt von unten, wodurch ein Bewegungsmuster entsteht, das einem horizontalen „S“ ähnelt. Diese Methode optimiert die Zeit, die für das Einstellen der KLTs in die Regale benötigt wird, und macht den Transferprozess effizienter.
Verbesserte KLT-Positionierungsgenauigkeit bei der Regalbestückung
SOTO erkennt und korrigiert nun aktiv falsch ausgerichtete KLTs während der Regalplatzierung. Mit Hilfe der Box-Tracking-Technologie erkennt SOTO jede Fehlausrichtung im Trichter und passt die Box für die richtige Platzierung an. Dies verbessert die Genauigkeit und Stabilität bei der Handhabung von KLTs.
Verhinderung von Kollisionen mit dem Rucksackregal
SOTO ist nun besser in der Lage, Kollisionen von KLTs mit dem Rucksackregal zu verhindern. Wenn der Kleinladungsträger (KLT) auf dem Greifer falsch ausgerichtet ist, wird die KLT-Presse verwendet, um sie neu auszurichten, was die Genauigkeit und Stabilität der KLT-Handhabung verbessert.
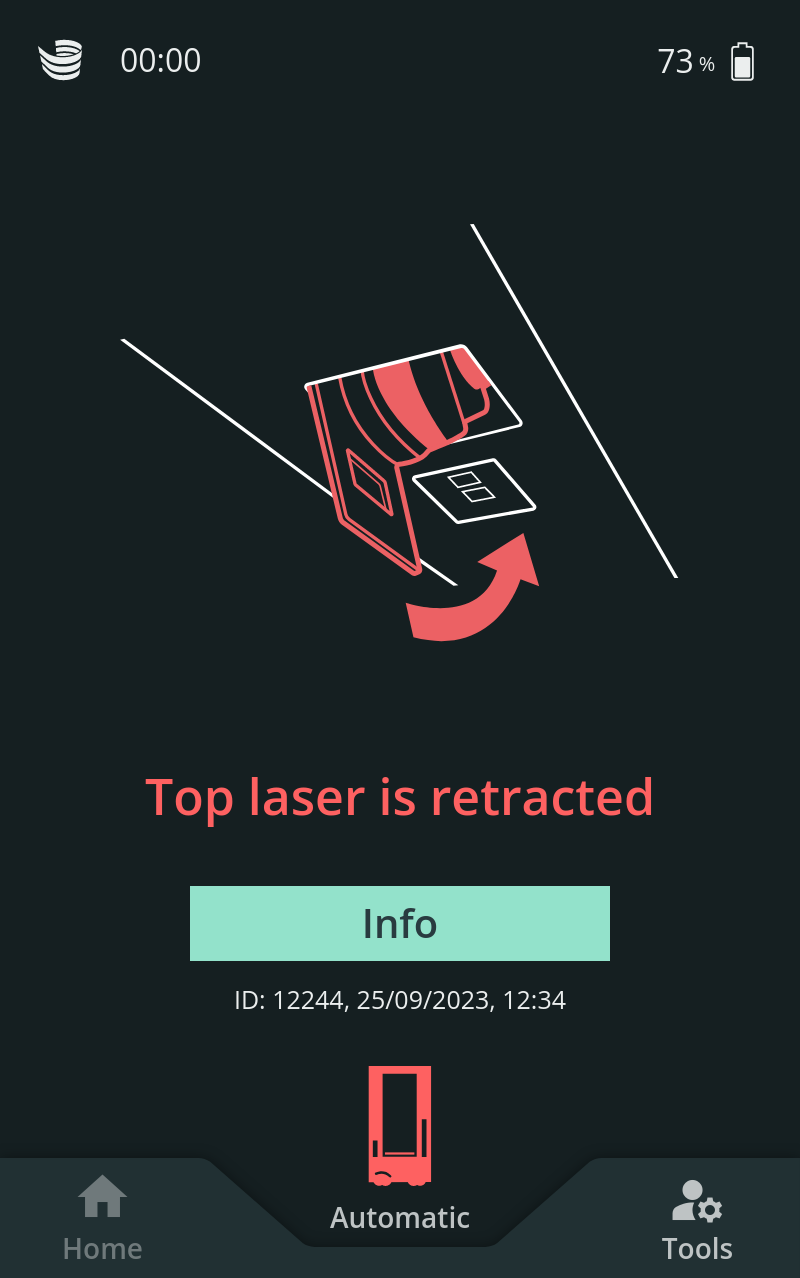
Heruntergezogene Laserscanner-Erkennung
Das SOTO-Display zeigt nun eine Fehlermeldung an, wenn der obere Laserscanner eingeklappt ist, was darauf hinweist, dass der Roboter neu lokalisiert werden muss. In diesem Fall werden auf dem Display detaillierte Anweisungen zur Behebung des Problems angezeigt.
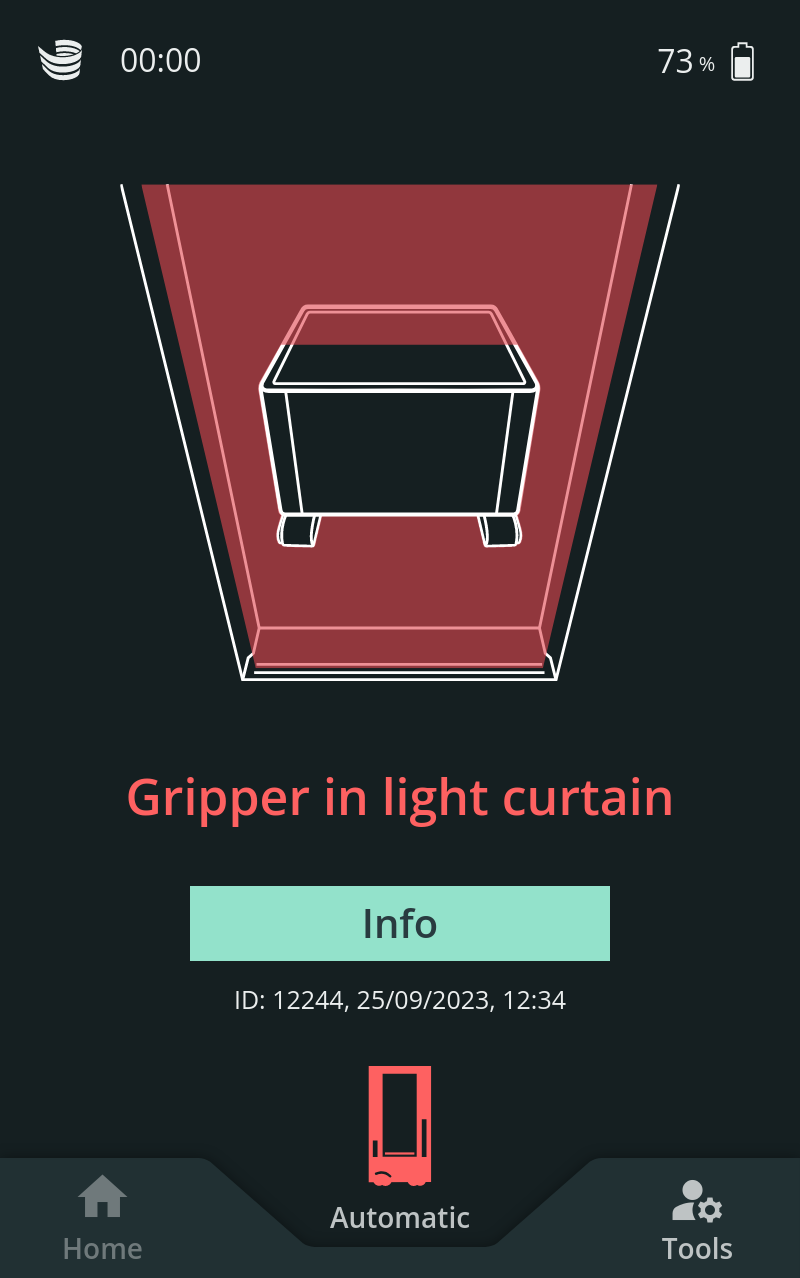
Display-Anweisungen für den Fall, dass der Greifer den Lichtvorhang auslöst
Das SOTO-Display zeigt nun eine Fehlermeldung an, wenn der Lichtvorhang durch den Greifer unterbrochen wird. In diesem Fall werden auf dem SOTO-Display detaillierte Anweisungen zur Behebung des Problems angezeigt.
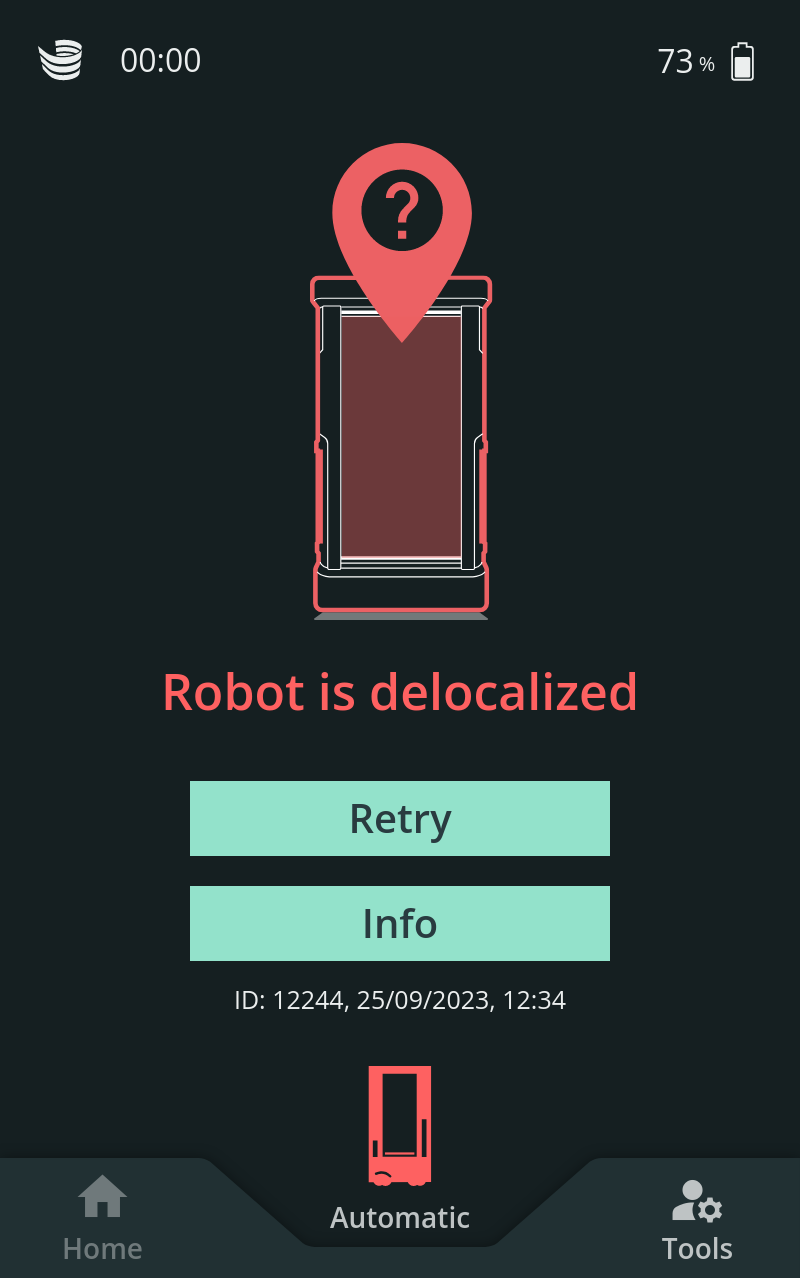
Display-Anweisungen bei einer Delokalisierung des Roboters
Das SOTO-Display zeigt nun eine Fehlermeldung, wenn SOTO deplatziert ist. In diesem Fall werden auf dem Display detaillierte Anweisungen angezeigt, wie der Roboter neu lokalisiert werden kann.
SOTO zeigt eine Fehlermeldung an, wenn der Roboter nicht zwischen den Betriebsmodi wechseln kann
Das SOTO-Display zeigt nun eine Fehlermeldung an, wenn der Roboter nicht zwischen den Betriebsmodi wechseln kann. In diesem Fall wird auf dem Display eine kurze Erklärung des aufgetretenen Problems angezeigt.
Alle Transportaufträge manuell ausführen
Die SOTO-Anzeige bietet nun die Möglichkeit, alle KLTs aus dem Roboter zu entfernen und die Sammeltransportaufträge manuell abzuschließen. Detaillierte Anweisungen finden Sie im Dokumentationsbereich.
Hinweis: Diese Option sollte nur verwendet werden, wenn dies absolut notwendig ist.
Magazino Fleet Manager (MFM)
Bestimmen Sie, ob SOTO Hindernisse auf der linken oder rechten Seite umfährt
Zäune können jetzt größer oder kleiner auf einer Seite im Environment Editor erstellt werden. Dies bestimmt den Navigationspfad des Roboters um Objekte herum und bevorzugt entweder links oder rechts:
Wenn eine Kante ausgewählt wird, öffnet sich ein Einstellungsfeld mit Eingabemöglichkeiten für „Feld A“ und „Feld B“, die der linken und rechten Seite der Kante auf der Karte entsprechen.
Der Zaun kann auf beiden Seiten größer oder kleiner gemacht werden.
Im Live-View kann der Status jedes Roboters eingesehen werden
Wenn Sie in der Live-Ansicht auf einen Roboter klicken, öffnet sich ein Seitenfenster mit detaillierten Informationen über den Status des Roboters. Dieses Seitenfenster beinhaltet:
Die Softwareversion des Roboters.
Die Anzahl der KLTs an Bord.
Der aktuelle Auftrag wird bearbeitet.
Eine Taste zum Aktivieren oder Deaktivieren des Roboters.
Im Falle eines Feueralarms erscheint ein rotes Feuersymbol neben dem Roboter. Sobald der Alarm aufgehoben ist, wird das Symbol grau und signalisiert, dass der Roboter manuell reaktiviert werden muss.
Duplizieren von Umgebungen im Umgebungseditor
Im Umgebungseditor ist es nun möglich, Umgebungen zu duplizieren. Klicken Sie dazu auf das Dreipunktmenü neben jedem „Environment“ in der Liste und wählen Sie „Duplizieren“ aus.
Neues Menü zum Erstellen von Regalen im Umgebungseditor
Der Environment Editor bietet jetzt eine präzisere und anpassbare Erstellung von Übergabestationen. Die wichtigsten Merkmale sind:
Einfache Regalidentifizierung mit Namensoptionen.
Einstellbare Breite und Höhe für Regale und KLTs.
Verschiedene Andockmöglichkeiten, einschließlich frontal oder seitlich mit unterschiedlichen Andockformen.
Erweiterte Einstellungen zur Definition des Typs der Übergabestation.
Die Regale können auch in der Live-Ansicht bearbeitet werden, um schnelle Anpassungen vorzunehmen. Weitere Informationen finden Sie im Dokumentationsbereich.
24-Stunden-Auftragshistorie
In der Auftragsübersicht werden jetzt die Transportaufträge der letzten 24 Stunden angezeigt. Darüber hinaus können Benutzer im Dropdown-Menü neben „Ausgewählte Transportaufträge“ zwischen abgeschlossene, abgebrochenen und cancelled sammeltransportaufträge im Dropdown-Menü neben „Ausgewählte Transportaufträge“ filtern.
Warnbenachrichtigungen in der Live-Ansicht
Die Live-Ansicht enthält jetzt Warnmeldungen. Wenn eine Warnung auftritt, wird das Robotersymbol gelb. Wenn Sie auf den Roboter klicken, wird die Warnmeldung auf der rechten Seite angezeigt.
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Automatische E1-Fehlerbehebung
SOTO ist nun in der Lage, E1-Laserscannerfehler automatisch zu beheben.
Zeitbereich-Argumente in MagCLI
Der Befehl "display stats task_phases" in MagCLI unterstützt nun ein Zeitbereichsargument. Auf diese Weise lassen sich die Zeitpunkte der Aufgabenphasen für bestimmte Zeiträume abrufen, was bei der Leistungsanalyse hilfreich ist.
Nützliche Szenarien:
Anzeige von Daten ab einem bestimmten Tag (z. B. Anzeige der Statistik task_phases -s 2023,06,01 für Daten ab dem 1. Juni 2023).
Anzeige von Daten ab einem bestimmten Zeitpunkt an einem Tag (z. B. Anzeige der Statistik task_phases -s 2023,06,01,12 für Daten ab 12 Uhr am 1. Juni 2023).
Anzeige von Daten bis zu einem bestimmten Tag (z. B. Anzeige der Statistik task_phases -e 2023,06,01 für Daten bis zum 1. Juni 2023).
Anzeige von Daten bis zu einem bestimmten Zeitpunkt an einem Tag (z. B. Anzeige der Statistik task_phases -e 2023,06,01,12 für Daten bis 12 Uhr am 1. Juni 2023).
Angabe eines vollständigen Zeitbereichs (z. B. display stats task_phases -s 2023,06,01,08 -e 2023,06,03,16 für Daten vom 1. Juni, 8 Uhr morgens, bis zum 3. Juni, 16 Uhr nachmittags, 2023).
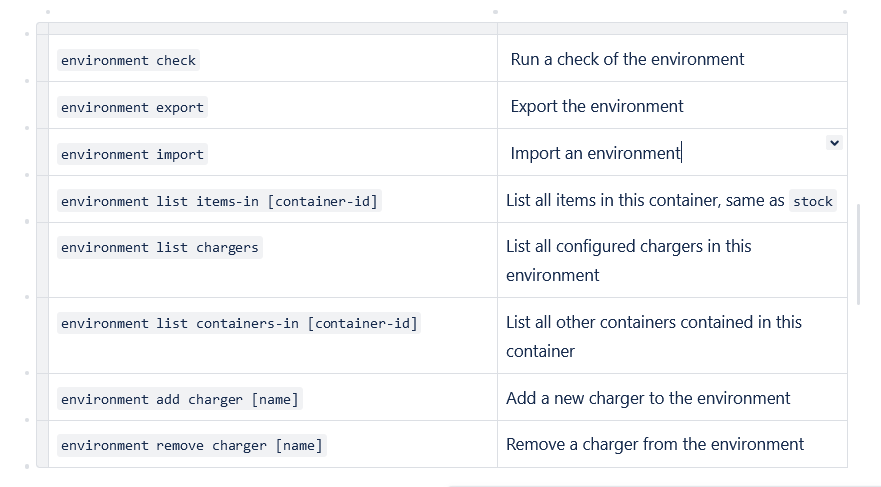
Neue Befehle zur Implementierung einer Umgebung in MagCLI
Es wurden neue MagCLI-Befehle für eine verbesserte Verwaltung der Roboterumgebung hinzugefügt. Die folgende Tabelle gibt einen kurzen Überblick über die einzelnen Befehle und ihre spezifischen Funktionen, die es ermöglichen, schnelle Umgebungsänderungen vorzunehmen.
Neue Befehle zur Anzeige von Firmware- und Hardware-Versionen in MagCLI
Zur Unterstützung bei der Überwachung und Fehlersuche im Robotersystem wurden zwei Befehle zur detaillierten Verfolgung der Hardware- und Firmware-Version hinzugefügt:
Show hardware versions Zeigt die Hardwareversionen der Roboterkomponenten an, wie sie in den ROS-Parametern aufgezeichnet sind.
Hardware-Show FW-Versionen Listet alle Firmware- und Hardware-Versionen jedes CAN-Bus-Teilnehmers auf.
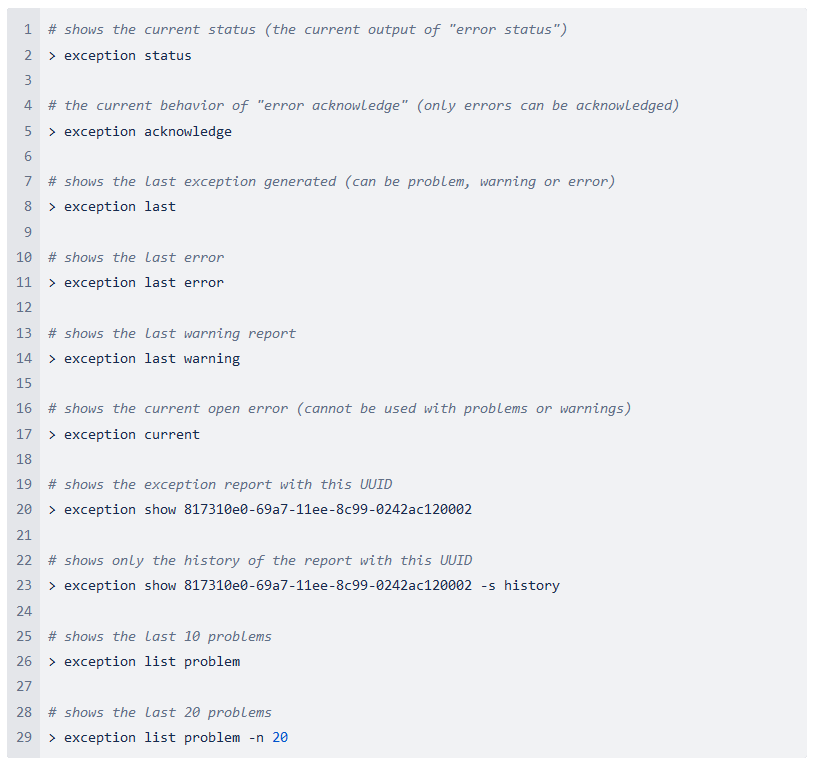
Detaillierte Exception Reports in MagCLI
MagCLI enthält jetzt neue Skripte für die detaillierte Analyse von Exceptions. Eine vollständige Liste der entsprechenden Befehle finden Sie im MagCLI-Dropdown-Menü.
Um einen bestimmten Fehler zu analysieren, gehen Sie wie folgt vor:
Ermitteln Sie die UUID des letzten Fehlers mit dem Befehl „Ausnahme zuletzt“ oder „Ausnahmeliste“, um eine vollständige Liste der letzten Ausnahmen zu erhalten.
Notieren Sie die UUID.
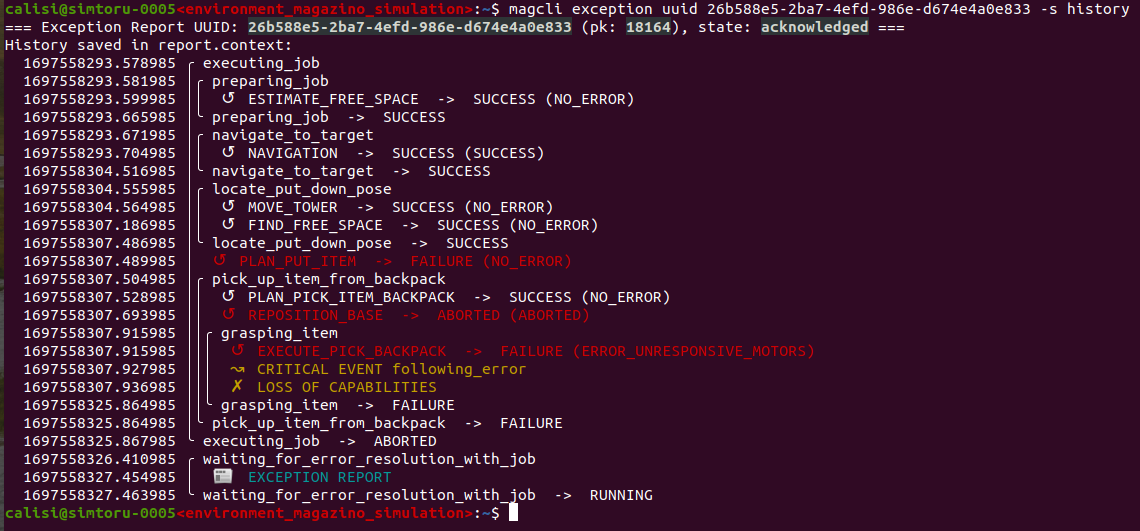
Geben Sie $ magcli exception [uuid] -s history ein, um die Aktivitäten des Roboters bis zum Auftreten des Fehlers anzuzeigen.
Screenshot vom SOTO-Display erstellen
Es ist jetzt möglich, einen Screenshot des SOTO-Displays zu erstellen, indem Sie den folgenden Befehl in MagCLI eingeben und den Anweisungen folgen: magcli take-picture screen
Das Bild wird auf dem internen Laufwerk von SOTO gespeichert (der Dateipfad wird vom Tool ausgegeben) und kann über ssh auf den Computer des Benutzers übertragen werden. Die Datei muss übertragen werden, damit das Bild angezeigt werden kann.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.


.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
(1).png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)