Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
SOTO hält sich genauer an die Fahrtrichtungen
SOTO hält sich nun an die im Environment Editor (EE) zu platzierenden Orientierungen. Dies verbessert die Zuverlässigkeit, insbesondere bei der Navigation durch enge Räume.
Die Standardkonfiguration für neue Kanten ist, dass die Ausrichtung von SOTO frei ist (d. h., der Roboter kann entweder mit der Rückseite oder der Vorderseite nach vorne fahren). Eine Anleitung, wie Sie den Roboter so platzieren, dass er an Kanten ausgerichtet ist, finden Sie auf dieser Seite.
SOTO nutzt die volle Kapazität des Rucksackregals
SOTO kann nun die gesamte Kapazität seines Rucksackregals für die KLT-Lagerung nutzen. Zuvor musste ein Fach einen leeren Platz für Nachbestellungen enthalten. Durch diese Verbesserung kann die Anzahl der pro Tour transportierten KLTs maximiert werden.
Hinweis: Wenn das Rucksackregal mit nur einem Fach für eine bestimmte Größe (z. B. ein 200x300-Fach) ausgelegt ist, benötigt das Rucksackregal dennoch einen freien Platz.
SOTO dockt zuverlässiger an Ladegeräte an
SOTO dockt jetzt zuverlässiger an Ladegeräte an und stellt sicher, dass der Akku bei niedrigem Ladezustand effektiv aufgeladen wird. Diese Verbesserung trägt dazu bei, dass der Roboter während der geplanten Betriebszeiten ausreichend aufgeladen ist.
Verbesserte Wiederherstellung nach Schutzfeldverletzungen
SOTO ist robuster, wenn es darum geht, sich von Verletzungen des Schutzfelds zu erholen oder wenn es zu einem Kontakt mit dem virtuellen Bumper kommt. Dies führt zu reibungsloseren Wiederherstellungen, sodass der Roboter den Betrieb effizienter wieder aufnehmen kann.
Verbesserte KLT-Verfolgung
SOTO pickt jetzt KLTs aufgrund von Verbesserungen des KLT-Tracking-Algorithmus etwas schneller. Diese Verbesserungen haben die Greiferprüfungen und -bewegungen beschleunigt, was zu Zeiteinsparungen führt.
LED-Signalisierung ausstehender Aktionen
Das Signalsystem des Roboters wurde aktualisiert. Wenn die LEDs derzeit keine Bewegung anzeigen, wird SOTO die nächste Aktion mithilfe der LEDs anzeigen und zwei Sekunden warten, bevor sie ausgeführt wird. Diese Sicherheitsfunktion macht Umstehende auf bevorstehende Bewegungen aufmerksam. Die LEDs schalten sich nach 10 Sekunden vollständiger Inaktivität aus.
Verbesserte Leistung mit Flottenmanagern von Drittanbietern
SOTO ist besser in der Lage, VDA5050-Befehle zu verarbeiten, die von Flottenmanagern von Drittanbietern übertragen werden. Dies führt zu zuverlässigerem Verhalten und besserer Leistung, wenn SOTO in gemischten Flottenumgebungen eingesetzt wird.
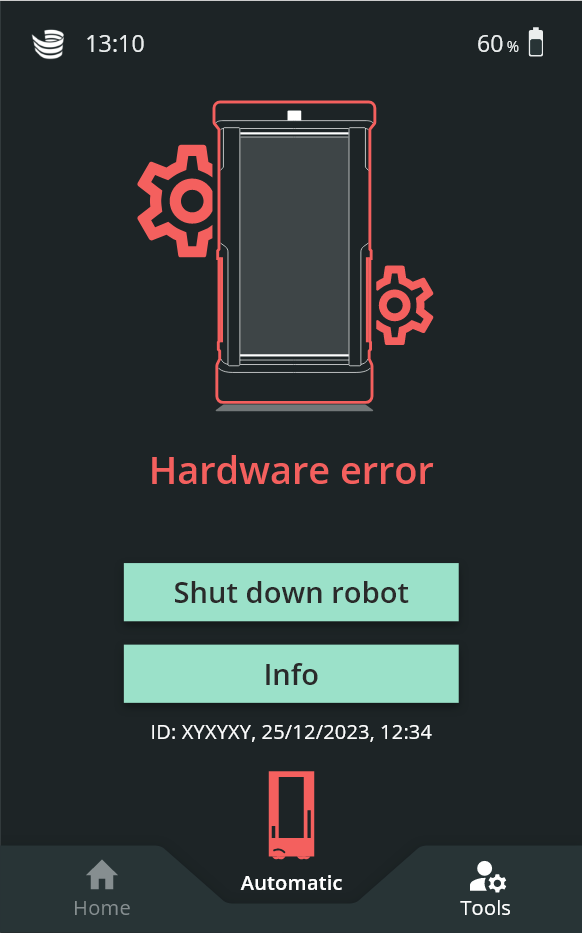
Anleitung zum Herunterfahren und Neustarten des Roboters
Es gibt ein neues Tutorial, in dem erklärt wird, wie man den Roboter vollständig herunterfährt und neu startet. Dies kann in seltenen Fällen erforderlich sein, wenn SOTO einen Hardwarefehler erkennt:
Drücken Sie die Taste "Shutdown" auf dem SOTO-Display.
Sobald die Lichter ausgeschaltet sind und der Roboter heruntergefahren ist, schalten Sie den E/A-Schalter am Roboter um.
Warten Sie 10 Sekunden lang und schalten Sie den Roboter wieder ein.
Überprüfen Sie, ob der Fehler erneut auftritt.
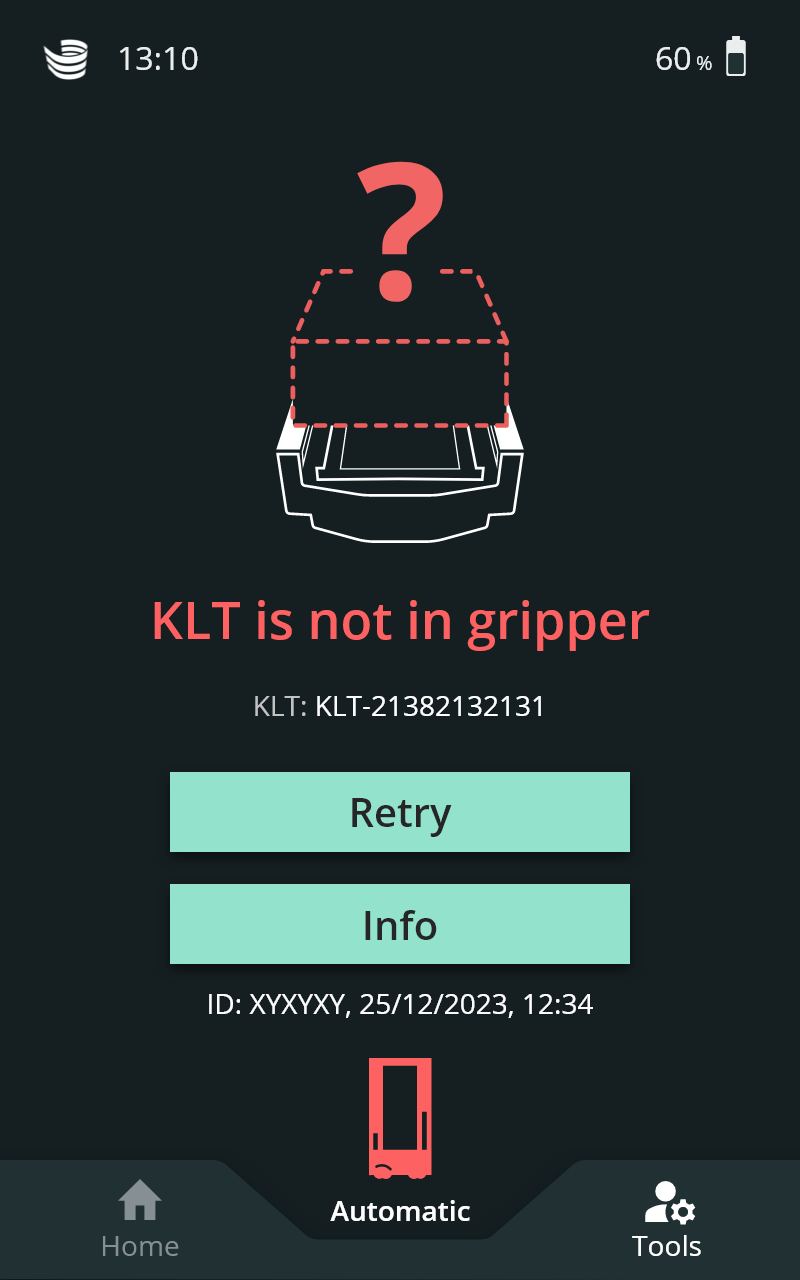
Anleitung für fehlende Artikel im Greifer
Es gibt ein neues Tutorial für den Fall, dass ein Objekt im Greifer fehlt. Dies kann passieren, wenn sie während der Übergabe manuell entfernt wird. Das Tutorial auf dem SOTO-Display bietet Anweisungen zur Behebung des Problems.
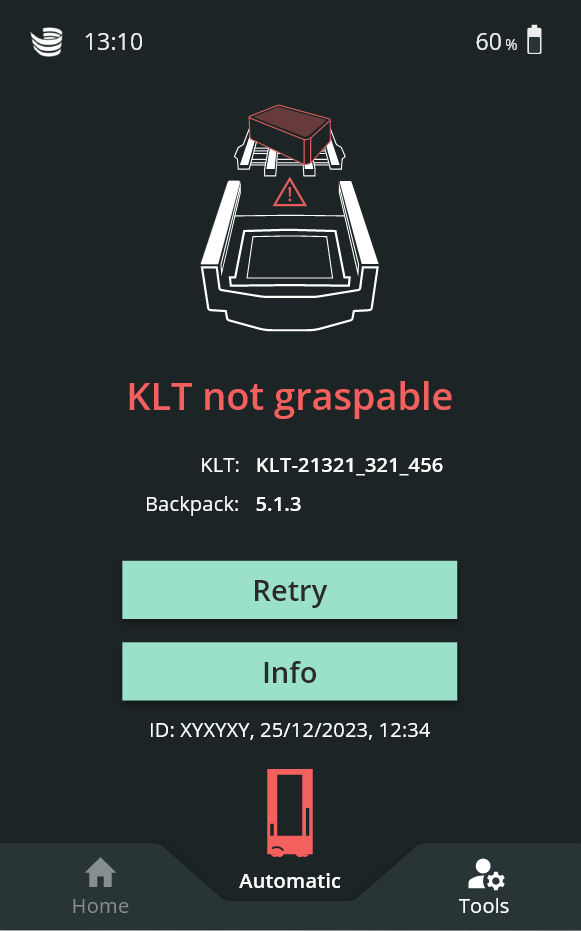
Anleitung für nicht erreichbare KLTs
Es gibt ein neues Tutorial für den Fall, dass ein KLT im Rucksackregal nicht erreichbar ist. Dies kann passieren, wenn der KLT im Rucksackregal feststeckt. Das Tutorial auf dem SOTO-Display bietet Anweisungen zur Behebung des Problems.
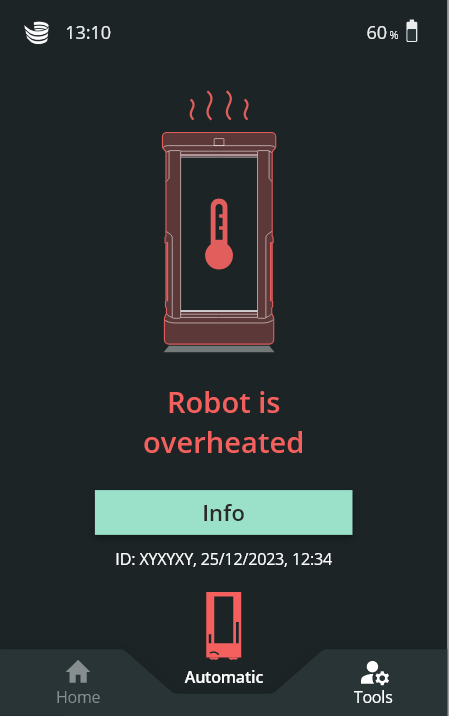
Anleitung bei Überhitzung
Es gibt ein neues Tutorial für den Fall, dass SOTO eine kritische Temperatur erreicht hat und abgekühlt werden muss. In diesem Fall bietet das SOTO-Display die Möglichkeit, den Support zu kontaktieren.
Anleitung für Systemfehler
Es gibt ein neues Tutorial für den Fall, dass SOTO auf einen Systemfehler stößt. Das Tutorial auf dem SOTO-Display bietet Anweisungen zur Behebung des Problems.
Hardwaretest auf dem SOTO-Display angezeigt
SOTO führt täglich einen Hardwaretest durch, um einzelne Komponenten zu überprüfen. Während dieses Tests wird die Meldung „Hardwaretest läuft“ auf dem SOTO-Display angezeigt, während der Roboter Greiferbewegungen ausführt. Dieser Test wird nur durchgeführt, während SOTO lädt.
Magazino Fleet Manager (MFM)
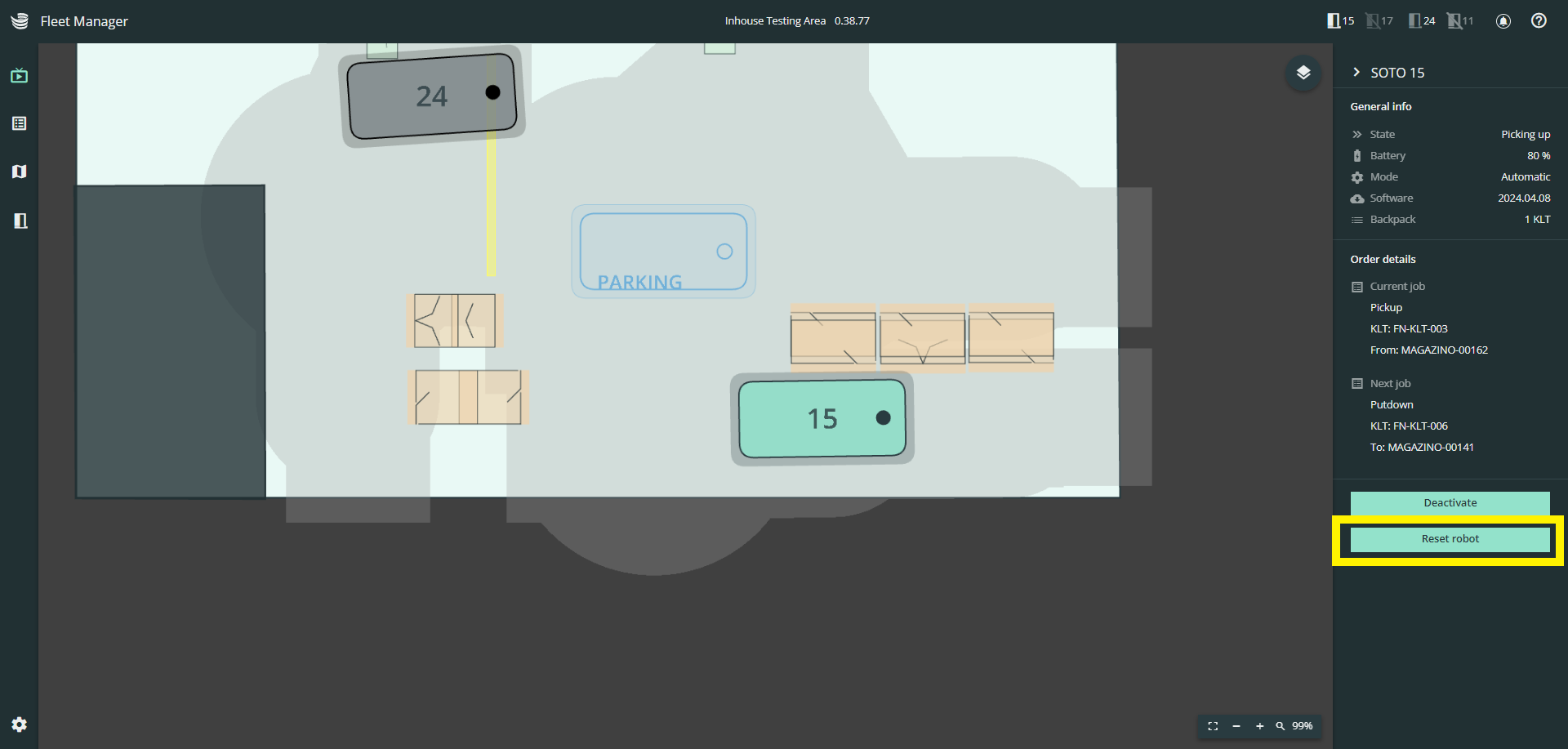
Roboter in Live-Ansicht zurücksetzen
Die Live-Ansicht bietet die Möglichkeit, den Roboter von allen KLTs zu leeren und die Sammeltransportaufträge manuell zu bearbeiten:
Klicken Sie in der Live-Ansicht auf einen beliebigen Roboter.
Klicken Sie im rechten Bereich auf „Roboter zurücksetzen“.
Folgen Sie den Anweisungen des Tutorials.
Hinweis: Die mit den KLTs im Rucksackregal verknüpften Sammeltransportaufträge werden standardmäßig in der LVS „abgebrochen“. Jede weitere Bearbeitung muss direkt in der WMS-Benutzeroberfläche gebucht werden. Die Funktion „Reset-Roboter“ ist nicht verfügbar, wenn SOTO von einem Flottenmanager eines Drittanbieters gesteuert wird.
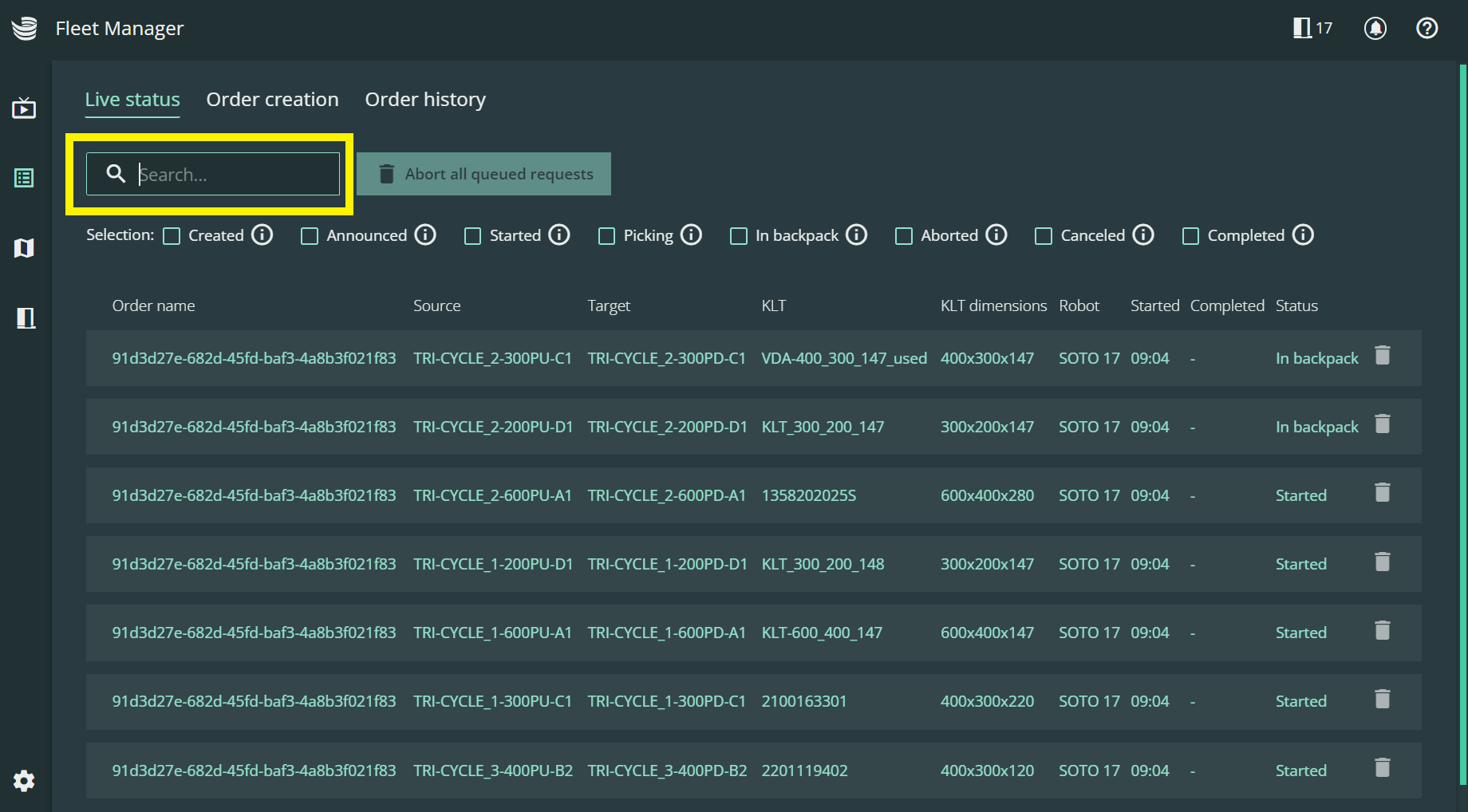
Neue Suchfunktion in der Übersicht „Sammeltransportauftrag“
Die Sammeltransportauftrag-Übersicht bietet eine Suchfunktion, mit der Sie nach folgenden Kriterien filtern können:
Name des Sammeltransportauftrags
Quelle
Ziel
KLT-Nummer
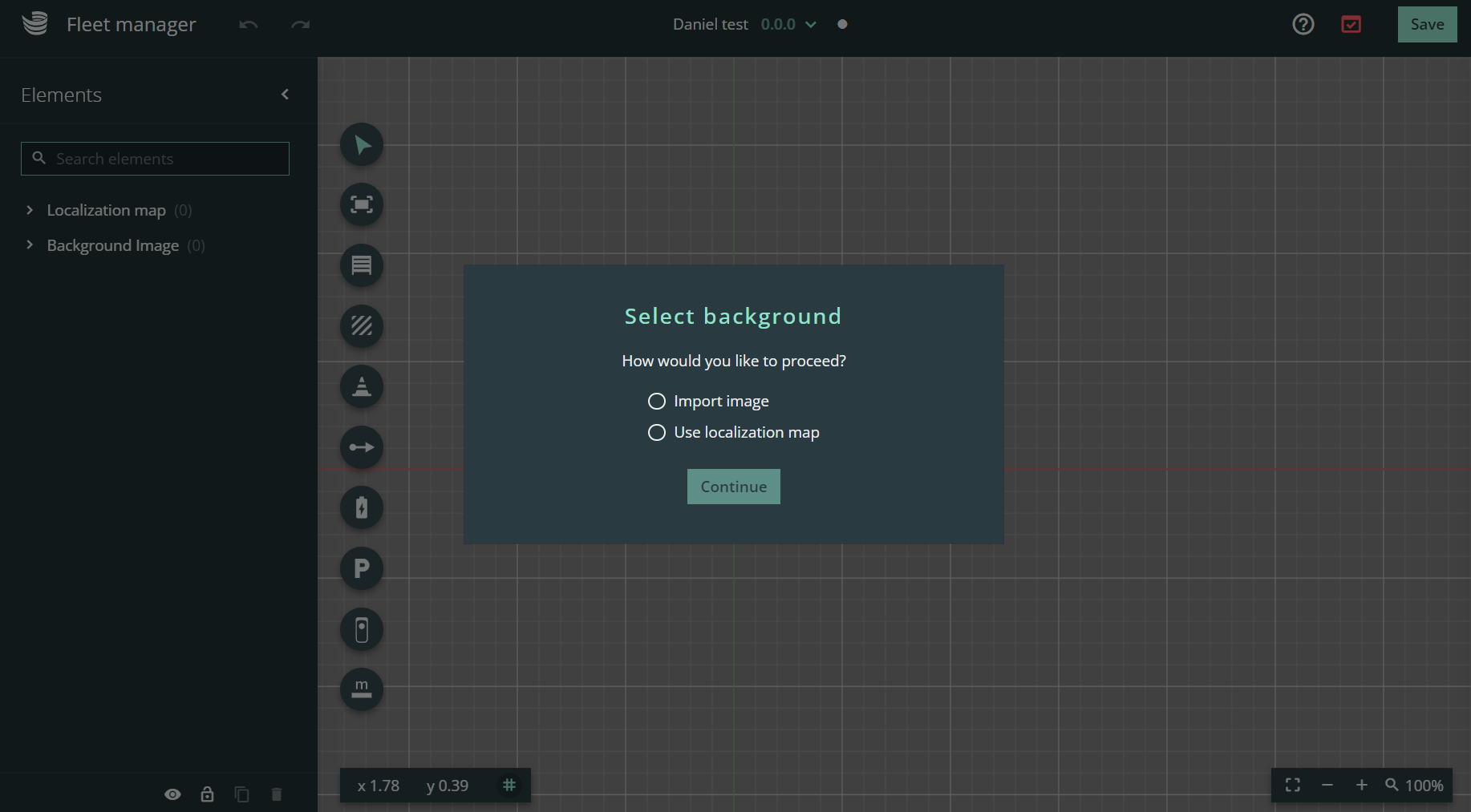
Fügen Sie dem Environment Editor ein Hintergrundbild hinzu
Im Environment Editor kann nun anstelle der standardmäßigen 2D-Karte ein Hintergrundbild platziert werden. Dadurch können Baupläne (z. B. CAD-Bilder) hochgeladen werden, die Orientierungspunkte für eine einfachere Planung der Roboterbahn enthalten. Das ausgewählte Hintergrundbild wird auch in der Live-Ansicht angezeigt.
Wichtig: Bitte stellen Sie sicher, dass die Bildgröße mindestens 15 MB beträgt und das Bild im PNG-Format vorliegt.
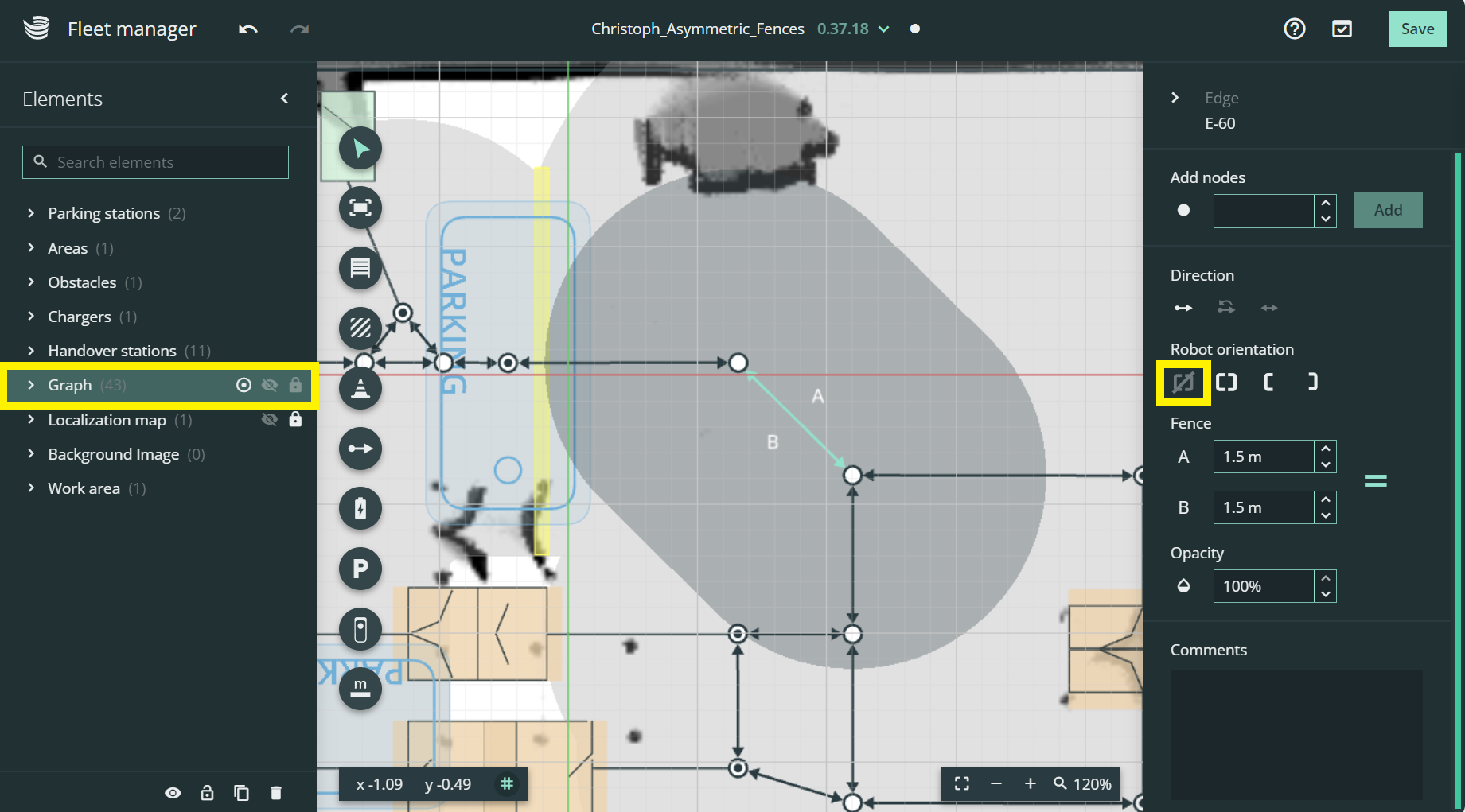
Fügen Sie Kanten ohne Ausrichtungseinstellungen hinzu
Im Environment Editor ist es möglich, Kanten ohne Orientierungseinstellungen hinzuzufügen. Dadurch kann SOTO die bequemste Fahrtrichtung wählen und vermeidet Richtungswechsel mitten auf einer Tour.
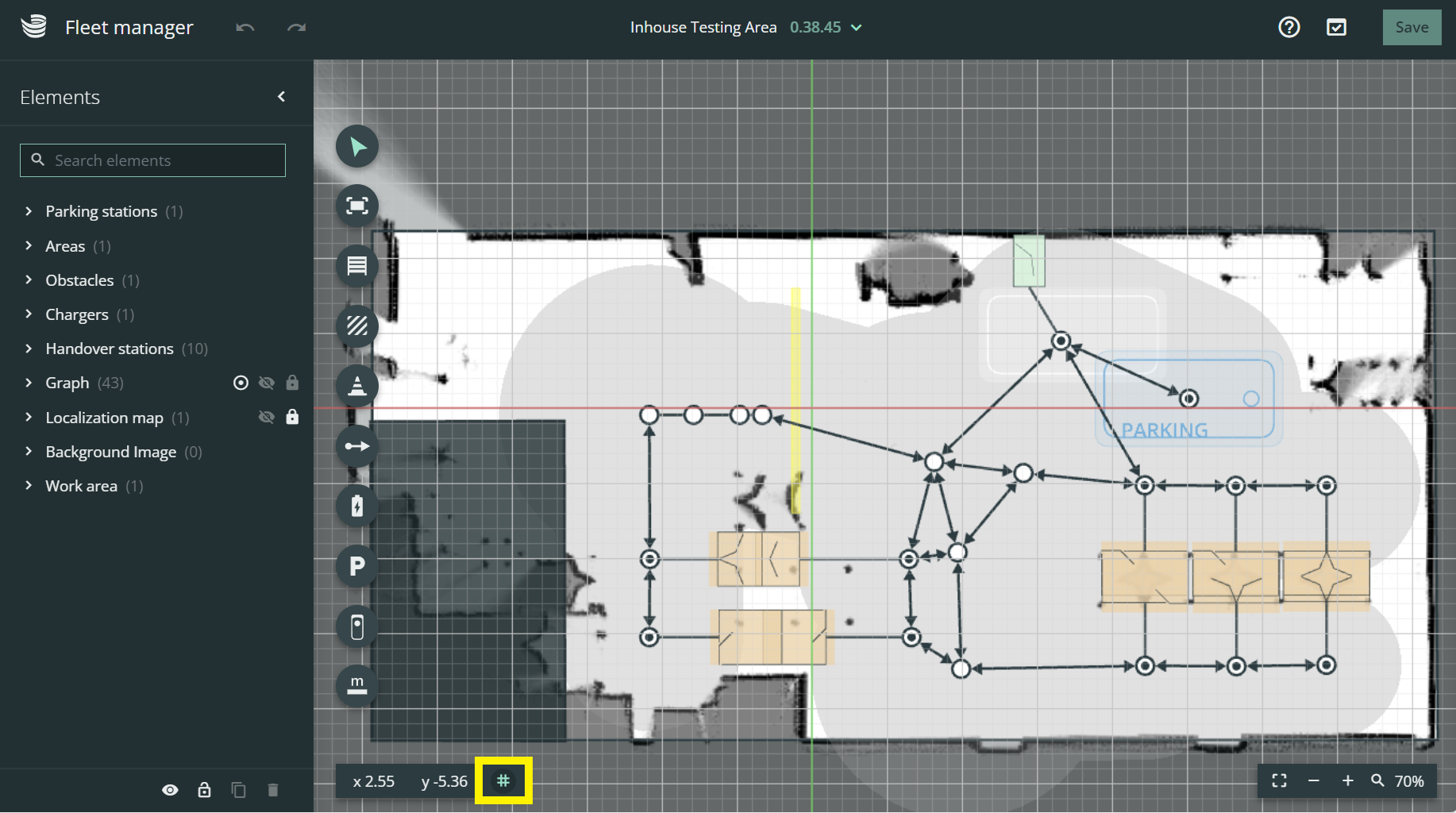
Rasterlinien ein- und ausblenden
Die Rasterlinien können nun im Environment Editor durch Klicken auf das Rasterliniensymbol in der linken unteren Ecke ein- und ausgeschaltet werden.
Die Rasterlinien sind besonders hilfreich, wenn Sie die Karte drehen oder Objekte (z. B. Übergabestationen) in einem bestimmten Winkel, z. B. 90° oder 45°, ausrichten.
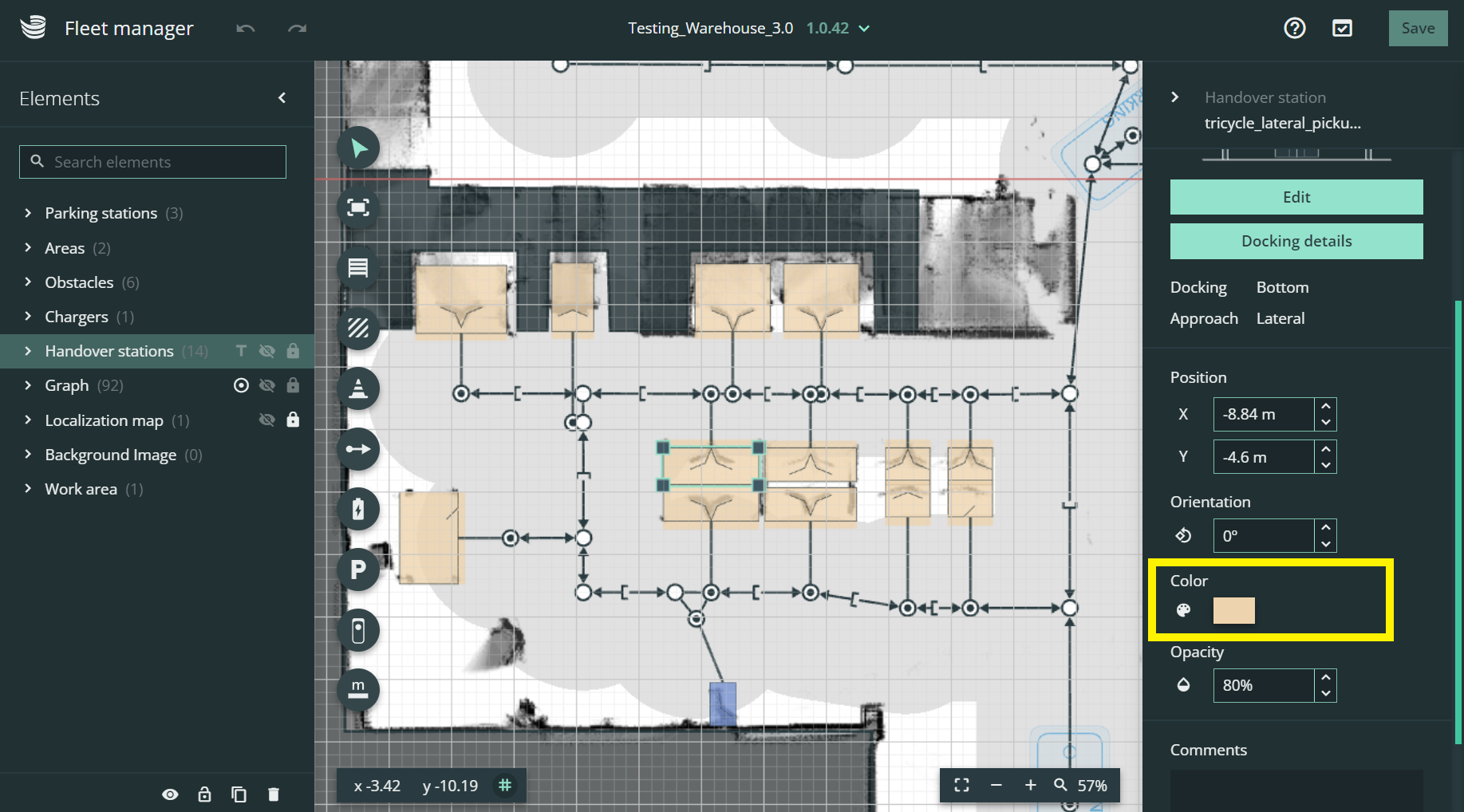
Ändern Sie die Farbe der Übergabestationen
Mit dem neuen Farbwähler können Sie Übergabestationen und Ladegeräten eine eindeutige Farbe zuweisen:
Klicken Sie auf eine Übergabestation und dann auf die farbige Box im rechten Fenster.
Wählen Sie eine beliebige Farbe aus.
Optional: Klicken Sie auf die kleinen Pfeile, um zu den HEX-Werten zu wechseln.
Die Farbcodierung erleichtert die Identifizierung der Übergabestationen auf der Karte. Es ist sinnvoll, Farben zuzuweisen, die dem vor Ort verwendeten Klebeband oder anderen ähnlichen Markierungen in der physischen Umgebung entsprechen.
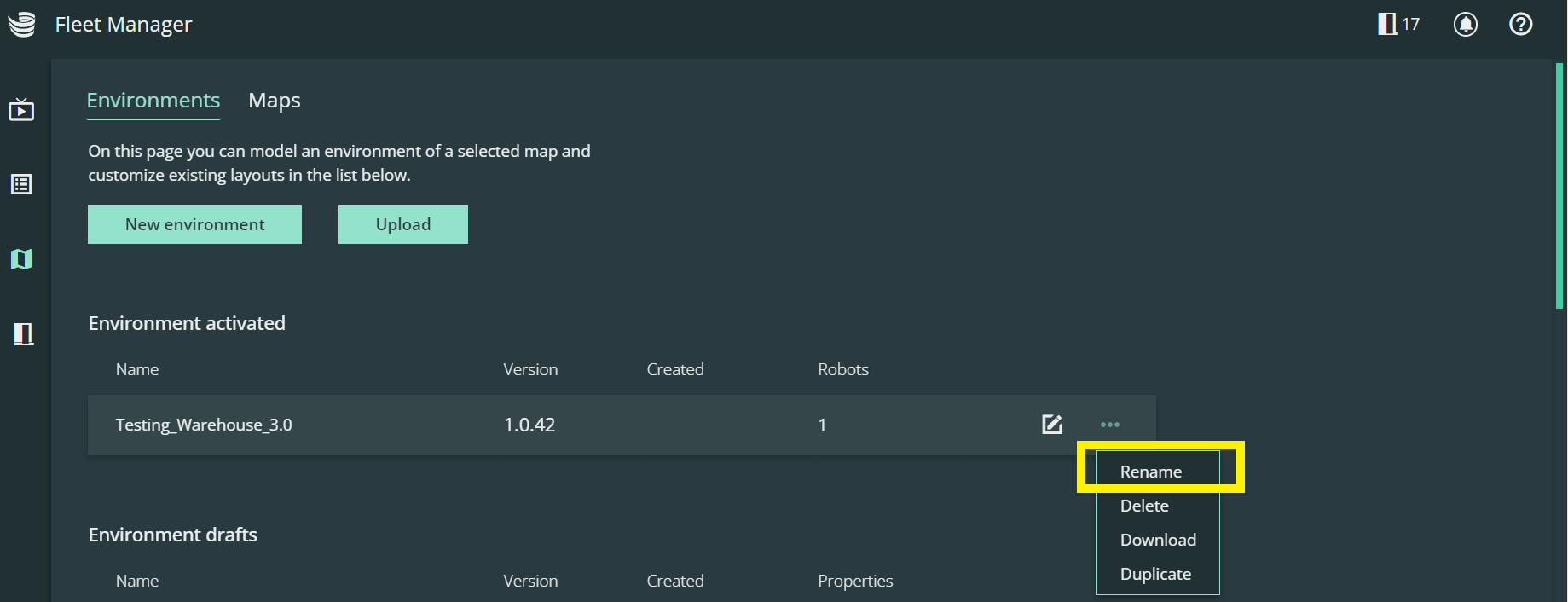
Umgebungen umbenennen
Im Environment Editor ist es jetzt möglich, den Namen einer Karte zu ändern:
Klicken Sie auf das dreipunktige Menü und betätigen Sie „Umbenennen“.
Geben Sie einen neuen Namen ein und betätigen Sie „Bestätigen“.
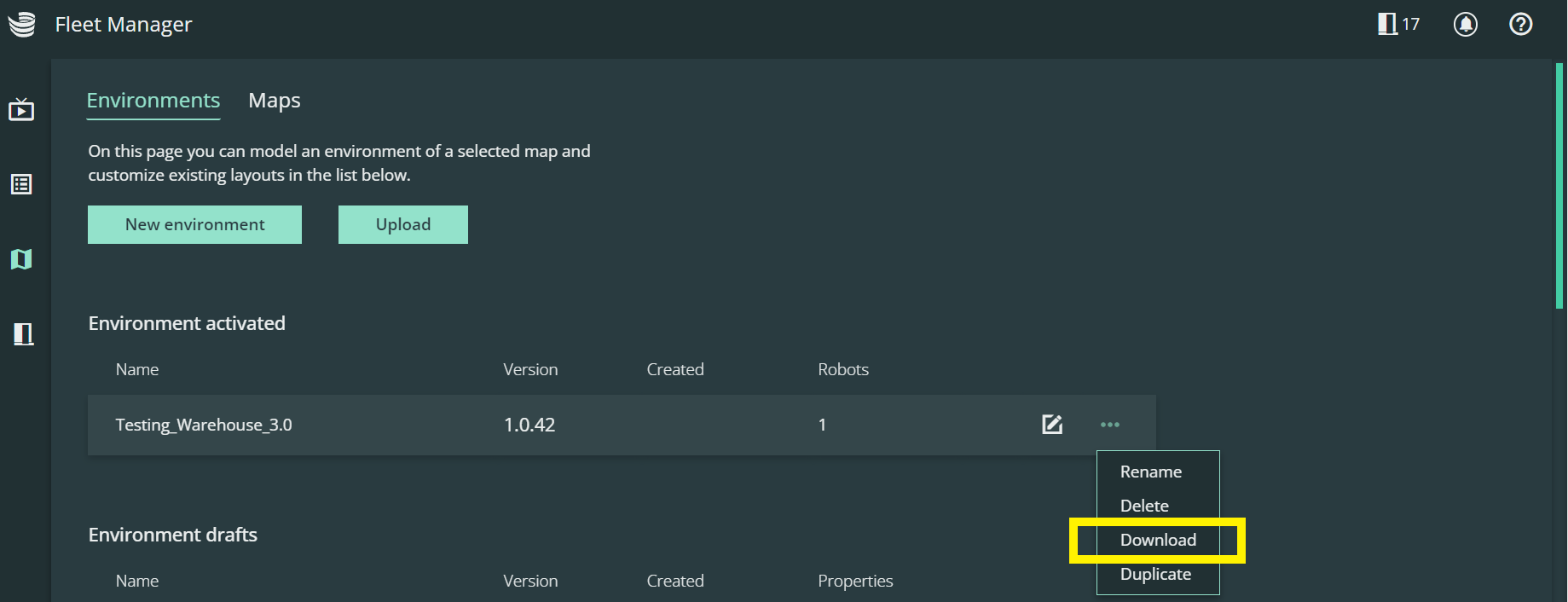
Download-Environments
Umgebungen können jetzt vom Environment Editor heruntergeladen werden:
Klicken Sie auf das Menü mit den drei Punkten und betätigen Sie „Download“.
Warten Sie, bis der Download abgeschlossen ist.
Dies ist nützlich für Kunden, die SOTO über einen Flottenmanager eines Drittanbieters betreiben möchten und die Karte importieren müssen.
Die Nummer des Roboters wird im SOTO-Symbol angezeigt
Die Roboternummer jedes SOTO wird nun zur einfachen Identifizierung im Robotersymbol angezeigt.Die Nummer des Roboters wird im SOTO-Symbol angezeigt
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Aktivieren und Deaktivieren des PIN-Codes für die SOTO-Anzeige
Die PIN-Code-Funktion, die für den Zugriff auf bestimmte Funktionen auf dem SOTO-Display verwendet wird, kann in MagCLI über die folgenden Befehle aktiviert und deaktiviert werden:
software disable-pin
software enable-pin
SOTO hält sich konsequenter an die Fahrtrichtung
Der Roboter hält sich nun konsequenter an die Fahrtrichtungen, die im Environment Editor (EE) zu platzieren sind. Dadurch wird der Roboter gezwungen, in kritischen Bereichen mit einer bestimmten Ausrichtung zu fahren, und es wird eine präzisere Steuerung bei der Definition von Wendepunkten ermöglicht. Dies führt auch dazu, dass der Roboter weniger zögert oder unnötige Drehungen ausführt.
Barcode-Erkennung in Bewegung standardmäßig aktiviert
Die Barcode-Erkennung während des Andockmanövers ist jetzt standardmäßig aktiviert. Der Barcode-Leser leuchtet während des Andockens auf, anstatt nur zu blinken, wenn der Greifer vor dem KLT positioniert ist. Dies ermöglicht eine schnellere Barcode-Erkennung.
Wenn ein bestimmter Barcode nicht identifiziert werden kann, versucht der Roboter es erneut und blinkt weiter vor dem Regal, bis ein Fehler-Tutorial auf dem SOTO-Display angezeigt wird.
Fehlerbehebung bei der Barcode-Erkennung mit Foxglove
Das Foxglove-Werkzeug kann zur Fehlerbehebung bei fehlgeschlagener Barcode-Erkennung verwendet werden. Falls die Erkennung fehlschlägt, zeigt Foxglove ein mit Anmerkungen versehenes Bild an, in dem erfolgreich gescannte Barcodes mit roten Boxen und den entsprechenden Daten hervorgehoben werden. Wird der Ziel-Barcode nicht identifiziert, kann der Benutzer überprüfen, ob der KLT vorhanden ist oder ob der Barcode nicht korrekt erfasst wurde. Wenn kein Manipulationsvideo aufgezeichnet wird, erscheint ein statisches Bild mit der Meldung „Warten auf Video-Feed“.
Detaillierte Exception Reports in MagCLI
Es gibt eine Reihe neuer MagCLI-Befehle:
Befehl
Beschreibung
Erwartetes Ergebnis
hardware leds color-test
Schaltet die LEDs jede Sekunde auf eine der Primärfarben um, bis das Skript mit Strg + C beendet wird.
LEDs schalten die verschiedenen Primärfarben (RGB) jede Sekunde in einer Schleife ein
hardware speaker test
Gibt eine Sinuswelle mit 440 Hz für ca. drei Sekunden über den eingebauten Lautsprecher wieder
Lautsprecher gibt drei Sekunden lang einen Ton aus
hardware leds blink-test
Testet den Blinkkreis Sicherheit und setzt die aktuelle Aktion von SOTO außer Kraft
Die linke Leiste blinkt fünf Sekunden lang, dann blinkt die rechte Leiste fünf Sekunden lang, bis der Vorgang vom Benutzer abgebrochen wird.
hardware bluespot <front/rear>
Aktivieren Sie den angegebenen Bluespot und überschreiben Sie dabei alle anderen Befehle für den Bluespot, während der Befehl ausgeführt wird. Wenn Sie Strg+C betätigen, wird die Steuerung des Bluespot an den Roboter zurückgegeben.
Für hardware bluespot front wird die Front-Bluespot-Leuchte eingeschaltet, bis sie durch Betätigen von Strg+C ausgeschaltet wird.
Bei hardware bluespot rear schaltet sich der Bluespot hinten ein, bis er durch Betätigen von Strg+C unterbrochen wird.
MagCLI-Befehle müssen Bindestriche enthalten
Befehle in MagCLI müssen nun Bindestriche statt Unterstriche enthalten, d. h. hardware leds color-test
Durchführung eines Bremsentests auf der vertikalen Achse
Die vertikalen Bremsen können nun auf Verschleiß geprüft werden. Wenn Sie diesen Test ausführen, bewegt sich die vertikale Achse nach unten und der Greifer verletzt den Lichtvorhang, um zu prüfen, ob der Roboter richtig bremst.
Weitere Informationen finden Sie in der Dokumentation zum SOTO-Funktionstest.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.