Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
SOTO ist in der Lage, sich von Kollisionen mit Einführhilfen zu erholen
SOTO ist nun in der Lage, sich besser zu erholen, wenn der KLT mit den Einführhilfen kollidiert. Durch die Verwendung der 3D-Kameras des Greifers kann sowohl die Position des KLT auf dem Greifer korrigiert als auch die KLT-Presse verwendet werden, wenn der KLT erheblich vom Regalfach abweicht. Dies verbessert die Robustheit im laufenden Betrieb.
Hinweis: Dieser Vorgang ist nur möglich, wenn der KLT mit der breiten Seite zuerst abgegeben wird.
SOTO stellt KLTs tiefer ins Regal
SOTO platziert die KLTs jetzt bei der Abgabe etwas tiefer in den Regalen (d.h. weiter hinter dem Adapter). Dies verbessert die Stabilität und reduziert Fehler wie zum Beispiel fehlgeschlagene Abgabevorgänge oder KLTs, die nicht korrekt im Durchlaufregal herunterrollen.
SOTO lädt die Batterie mit 60A
SOTO lädt jetzt mit einem höheren Strom von 60 A, wodurch sich die Ladezeit von 0 % auf 100 % im Vergleich zur vorherigen Einstellung von 50 A um etwa 15 Minuten verkürzt.
Bitte beachten Sie, dass das Ladegerät seinen Stromausgang anpassen kann, um den Stromverbrauch zu regulieren, so dass es möglicherweise nicht immer die vollen 60 A liefert.
SOTO nimmt KLTs effizienter aus Übergabestationen auf
SOTO nimmt die KLTs jetzt effizienter aus den Regalen auf. Der Roboter beginnt mit dem Andocken an einen Abschnitt des Regals und führt jede Aufnahme durch. Nach Abschluss eines Regalabschnitts wird am nächsten Regalabschnitt angedockt und der Kommissioniervorgang fortgesetzt. Diese Methode reduziert die Anzahl der Andockvorgänge des Roboters an das Regal und macht den Versorgungsprozess effizienter.
SOTO kann einen eindeutigen Namen haben
Jeder SOTO Roboter kann einen eindeutigen, individuell konfigurierbaren Namen haben, der sowohl im MFM als auch auf dem SOTO Display angezeigt wird. Beachten Sie, dass Namensänderungen auf Anfrage von einem Magazino Deployment Engineer oder Integrator durchgeführt werden müssen.
SOTO gibt akustische Warnungen aus
SOTO gibt jetzt ein akustisches Warnsignal ab, um Umstehende zu warnen, wenn der Roboter blockiert ist oder ein Fehler auftritt.
Hinweis: Diese Funktion ist bei älteren SOTO-Modellen möglicherweise nicht vorhanden.
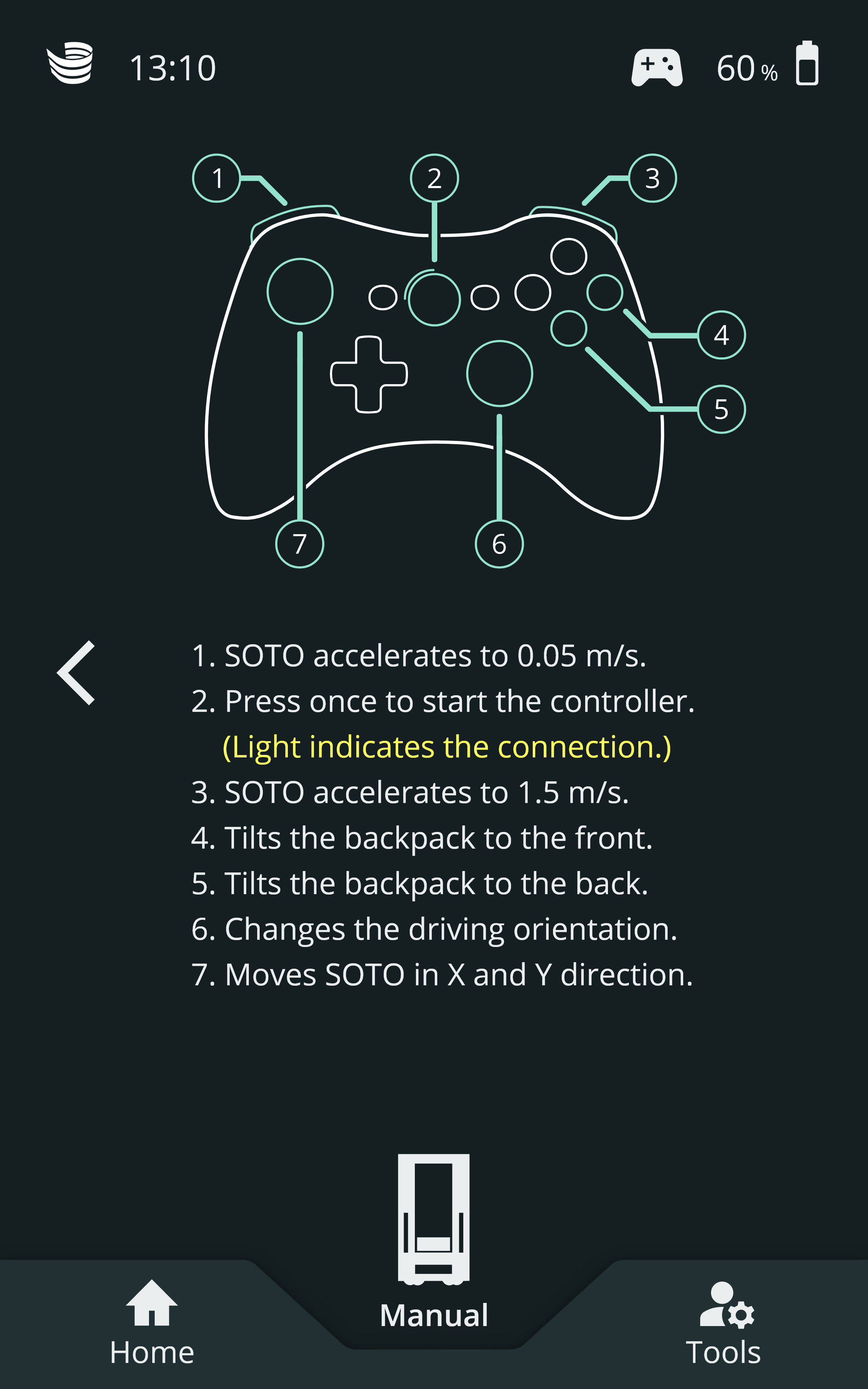
Legende zum Handheld-Controller
Wenn Sie den Controller an SOTO anschließen, erscheint auf dem Display eine Legende, in der die Funktion jeder Taste des Controllers erklärt wird, um die Bedienung zu erleichtern.
Verbesserte KLT-Nachverfolgung
SOTO ist nun besser in der Lage, KLTs zu identifizieren und zu verfolgen, selbst wenn die KLTs dunkel gefärbt sind. Die 3D-Kamera am Greifer regelt die Belichtung, um bessere Tiefendaten zu erfassen. Dadurch wird die Nachverfolgung der KLTs zuverlässiger.
Verbesserte Barcode-Erkennung
Die 2D-Barcode-Erkennung wurde verbessert, insbesondere für Barcodes mit einer Modulgröße von 0,5 mm. Dies erhöht die Zuverlässigkeit der KLT-Nachverfolgung im Betrieb.
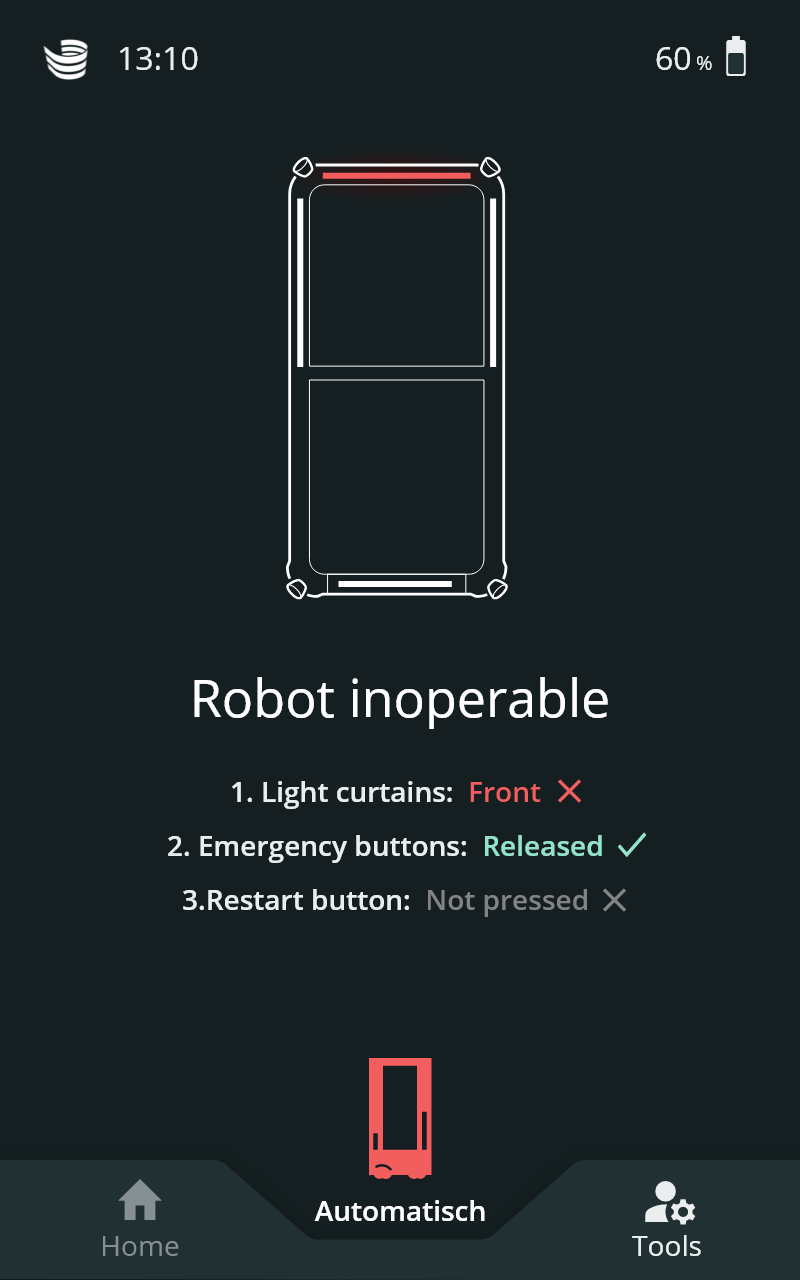
Anleitung für Verletzungen des Lichtvorhangs
Es gibt eine neue Option, um den Roboter von einem Hindernis automatisch wegfahren zu lassen, wenn der Lichtvorhang verletzt wird. Das SOTO-Display zeigt an, welcher Lichtvorhang ausgelöst wurde und gibt Anweisungen zur Wiederherstellung des Roboters.
Magazino Fleet Manager (MFM)
Wichtig: Reaktivierung aller Umgebungen
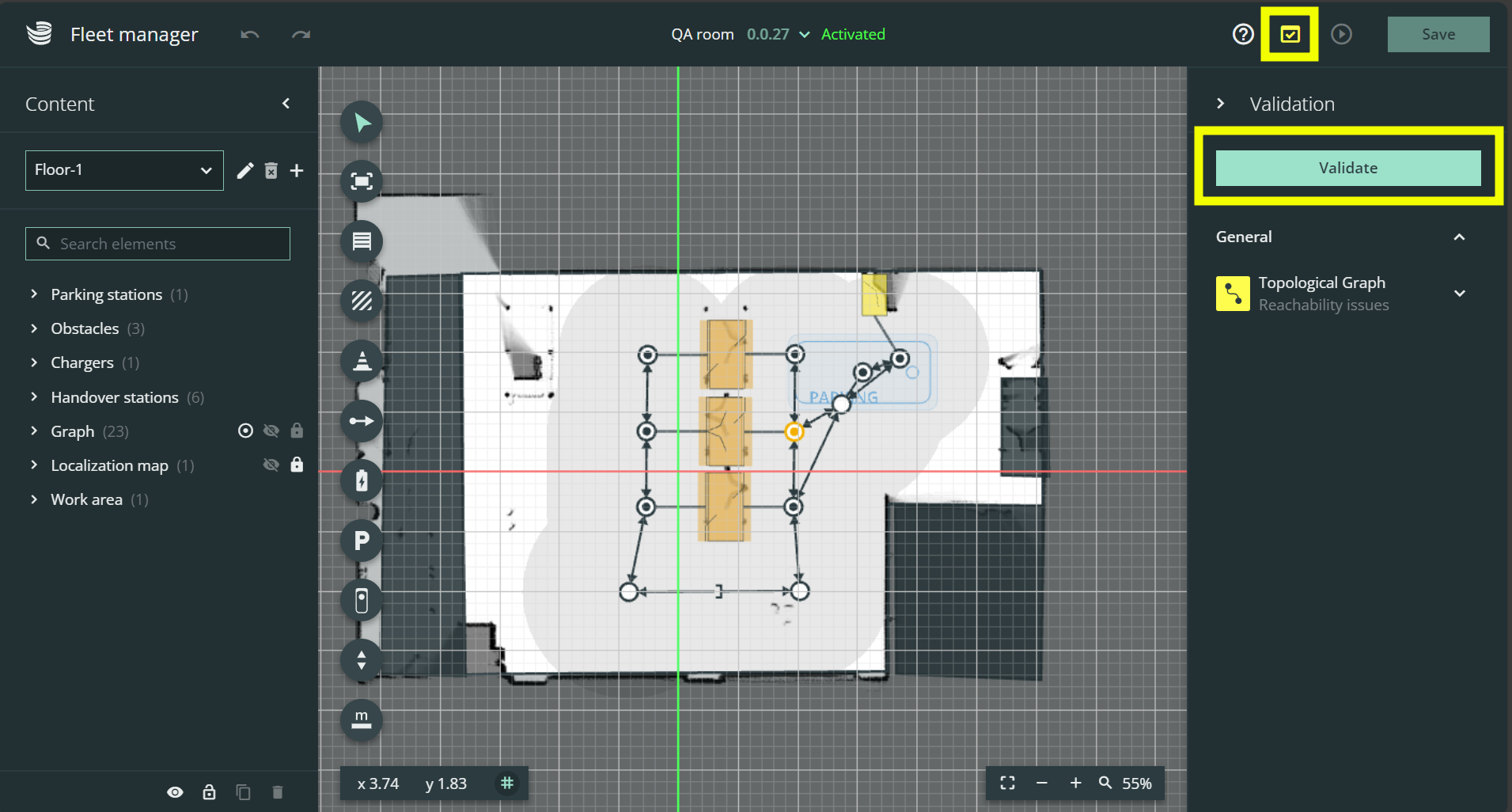
Aufgrund der neuen Validierungsfunktion, die prüft, ob ein Umgebungsmodell für SOTO geeignet ist, müssen alle bestehenden Umgebungen neu validiert und reaktiviert werden, damit SOTO weiterhin funktioniert.
Um dies zu tun, müssen Sie die Umgebung editieren und dann auf das Häkchensymbol in der oberen rechten Ecke klicken. Drücken sie dann auf 'Validieren'. Reaktivieren Sie anschließend die Umgebung. Es ist nicht möglich, eine Umgebung ohne vorherige Validierung zu aktivieren.
Hinweis: Der Validierungsvorgang kann bis zu einer Minute dauern.
Abbruch von Aufträgen während einer Aufnahme
Das Abbrechen eines Auftrags, bei dem ein Pick manuell in MFM oder auf dem SOTO-Display abgebrochen wird, ist nun während des gesamten KLT-Kommissioniervorgangs verfügbar, auch wenn sich der KLT bereits auf dem Greifer befindet.
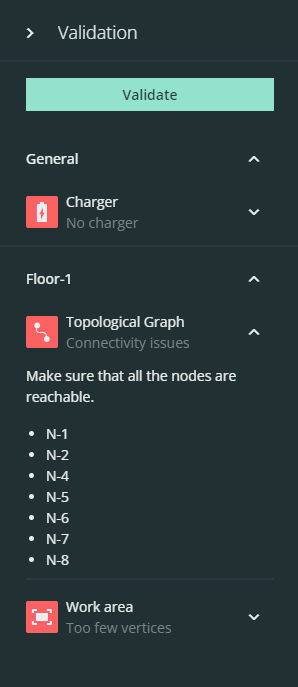
MFM validiert die Arbeitsumgebung
Der Environment Editor validiert nun die Eignung des Arbeitsbereichs für den Roboter, einschließlich der Überprüfung von Fahrwegen und ob der Roboter an Übergabestationen und Ladegeräten andocken kann. Dadurch wird sichergestellt, dass der Roboter in neuen Umgebungen effektiv arbeiten kann, bevor diese aktiviert werden.
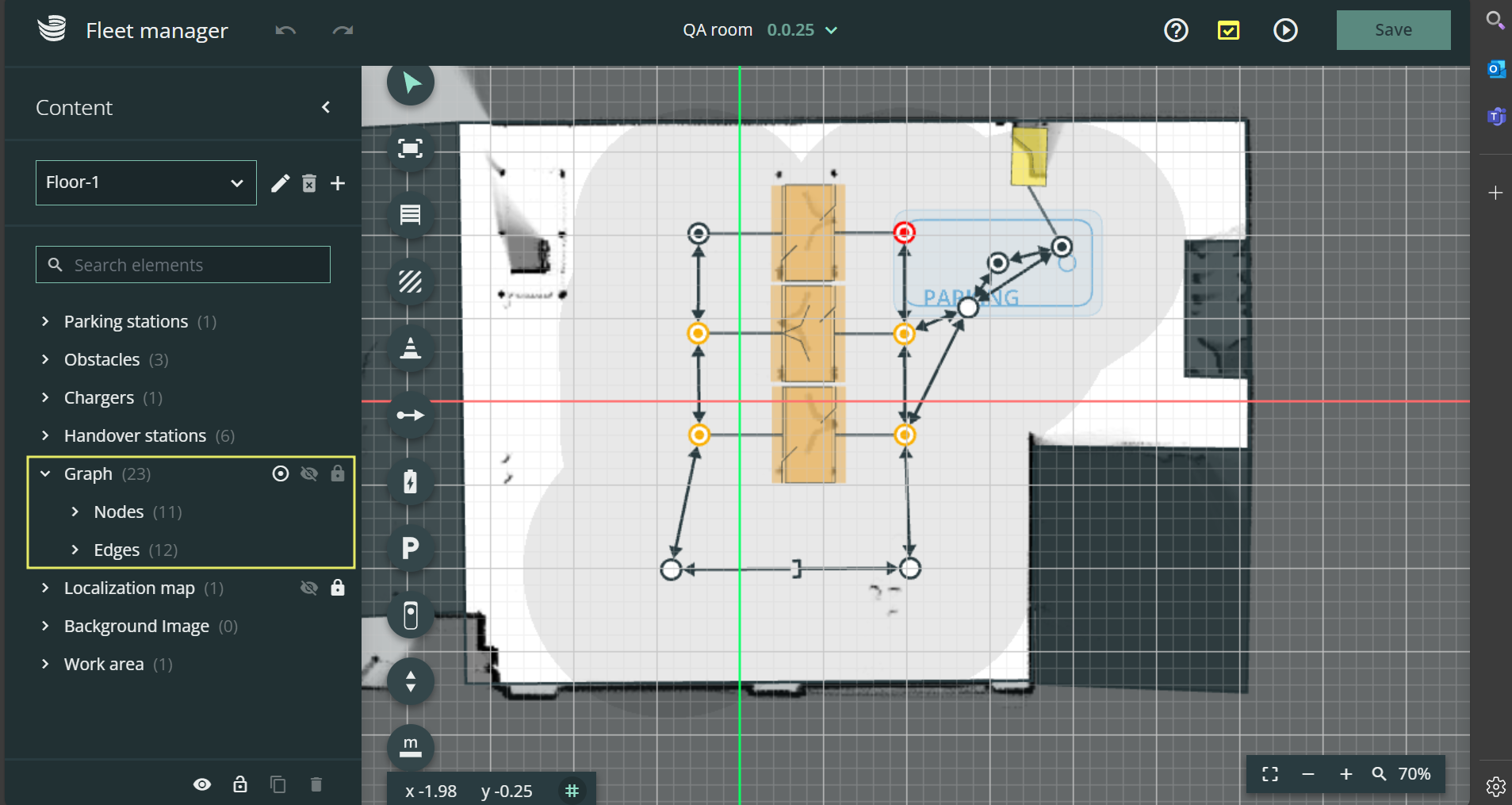
Unterteilung von Knoten und Kanten im Environment Editor
Das linke Panel des Umgebungseditors enthält eine Option, um Knoten und Kanten in Gruppen zu unterteilen.
Verbesserte Suchergebnisse
Die Suchfunktion des Auftragsmanagers wurde verbessert, um relevantere Suchergebnisse zu liefern und so das Auffinden bestimmter Aufträge oder KLTs zu erleichtern.
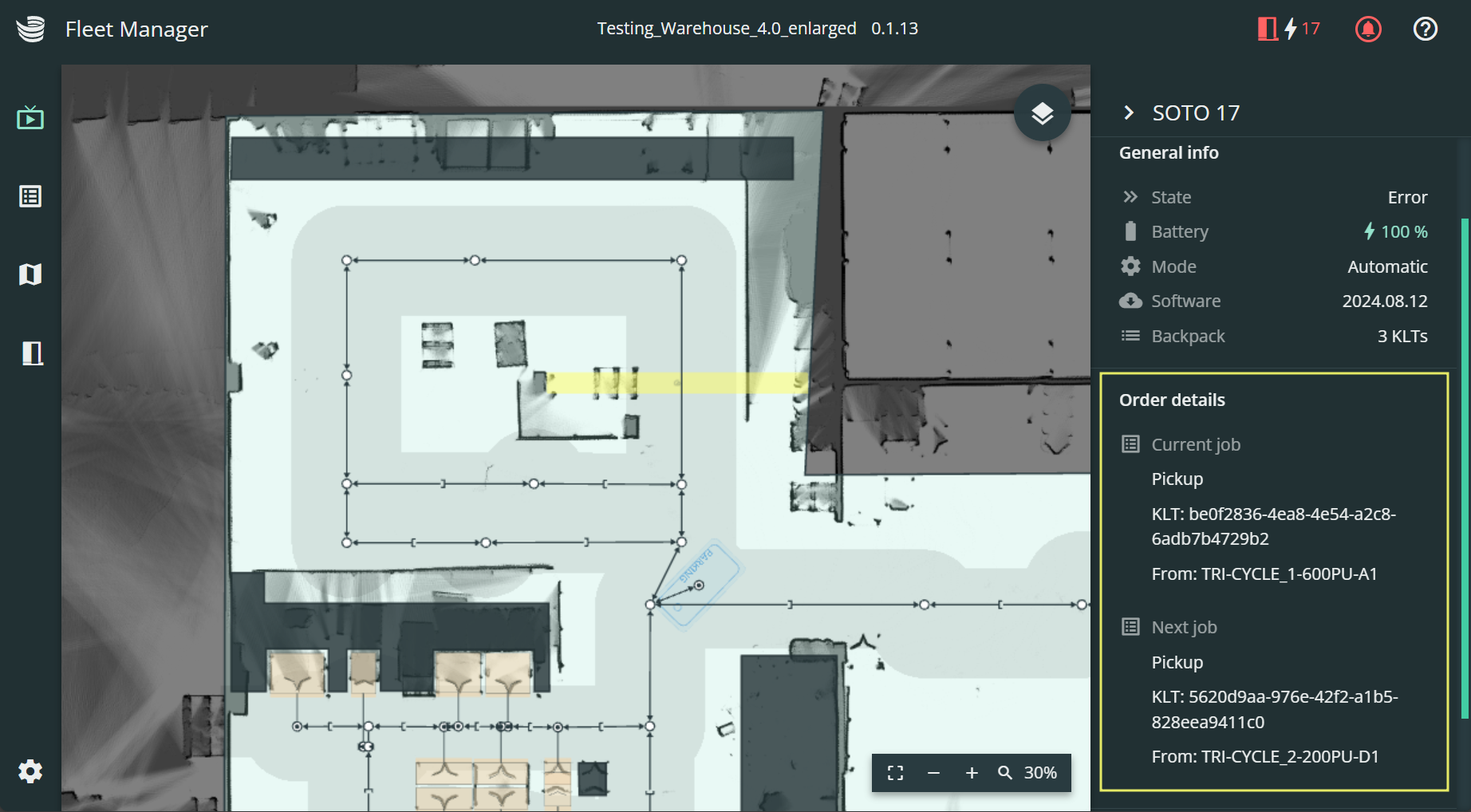
Aktive und offene Aufträge anzeigen
Das Seitenpanel in der Live-Ansicht zeigt aktive und ausstehende Aufträge an, wenn Sie auf einzelne Roboter klicken.
Neue Browser-Einschränkungen
Der Magazino Fleet Manager kann ausschließlich in den Google Chrome und Microsoft Edge Webbrowsern genutzt werden.
Aufzüge und zweite Stockwerke modellieren
Der Umgebungseditor bietet die Möglichkeit, zwei Stockwerke mit einem Aufzug zu verbinden, den SOTO nutzen kann, wenn genügend Platz vorhanden ist.
Hinweis: Diese Funktion erfordert einen SYNAOS Master Controller.
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Neue Markertypen in Foxglove
Die Perception Debug-Marker in Foxglove werden für die Analyse in drei verschiedene Markertypen eingeteilt: Container, Hindernisse und Gegenstände.
Container: Stellt ein virtuelles Objekt dar, das die Grenzen des Compartments umreißt.
Element: Bezeichnet ein identifizierten Artikel, wenn ein Barcode erfolgreich erkannt wird.
Hindernis: Steht für nicht identifizierte Artikel, bei denen die Barcode-Identifizierung nicht erfolgreich war. Zudem werden alle Regalkomponenten als Hindernisse eingestuft.
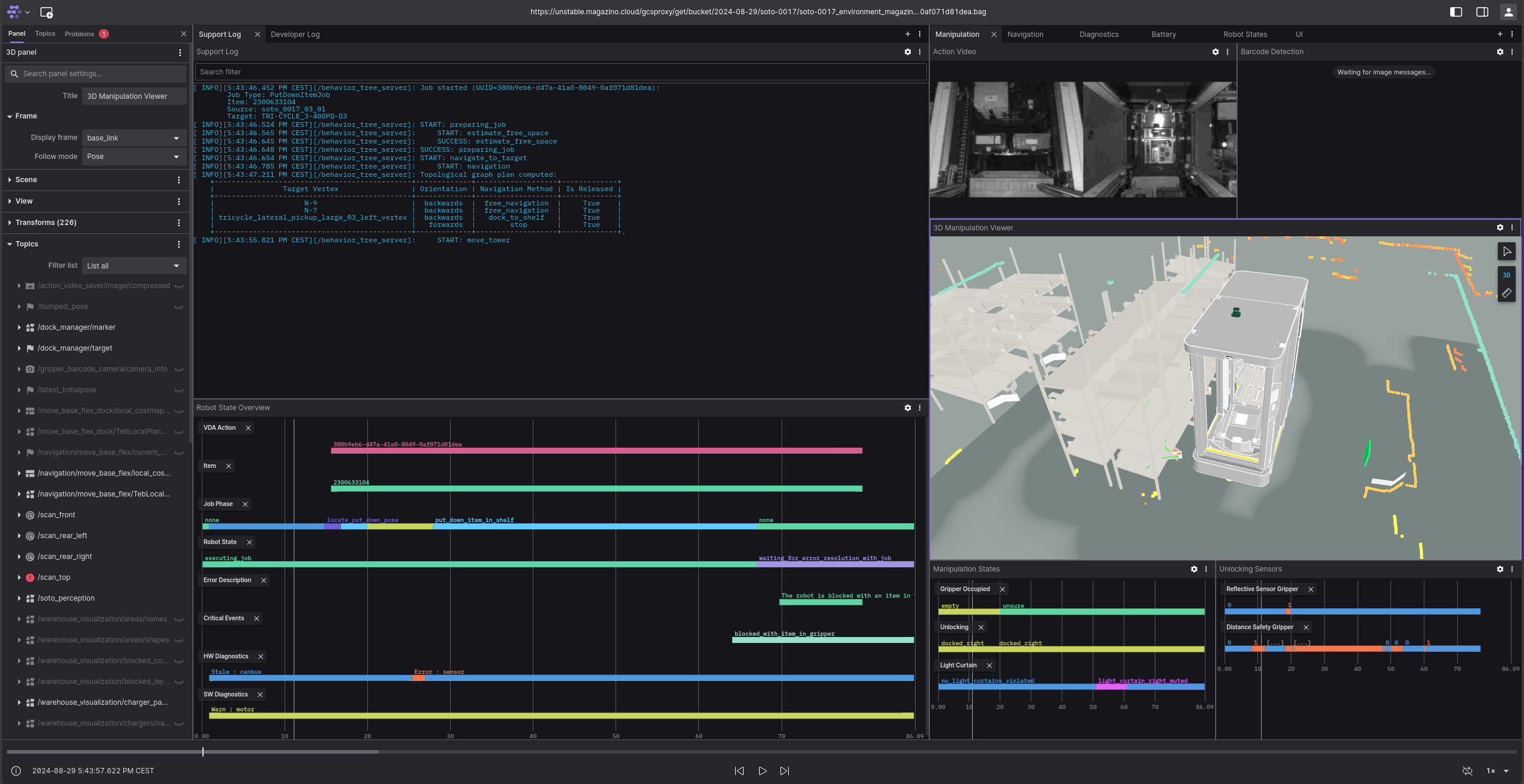
Support-Protokolle werden automatisch zu Foxglove hochgeladen
Support-Protokolle werden jetzt standardmäßig auf Foxglove veröffentlicht, einschließlich Manipulationsvideos während der Kommissionierung. Dies erleichtert die Identifizierung bestimmter Probleme bei der Fehlerbehebung.
Wiedergabe von VDA5050-Nachrichten in Foxglove
Alle VDA5050-Meldungen werden in BigQuery protokolliert und können in Foxglove zur Fehlersuche im Multi-Roboter-Verhalten wiedergegeben werden. Zu den Statistiken gehören Roboter-Snapshots in bestimmten Abständen.
Hinweis: Diese Funktion ist nur auf Anfrage verfügbar.
Vereinfachte Wartungstests mit Robot Skills
Roboterfunktionen, die für Service- und Supportaufgaben verwendet werden, können jetzt über eine vereinfachte webbasierte Benutzeroberfläche verwaltet werden. Dies ist eine benutzerfreundliche Alternative zum aktuellen Kommandozeilentool MagCLI. Es gibt zwei verschiedene GUIs:
GUI für den Support: Enthält Funktionen für Remote Operations. Auf die GUI kann über den folgenden Link remote zugegriffen werden (erfordert eine SSH-Verbindung zum Roboter): https://localhost:8001/remote-ops/#/
GUI für Service: Enthält Wartungs-, UVV- und Servicefunktionalitäten für Servicetechniker. Der Zugriff darauf muss vor Ort über ein LAN-Kabel erfolgen, das mit SOTO verbunden ist. Bitte beachten Sie: Diese GUI befindet sich noch in der Entwicklung.
Diese grafischen Benutzeroberflächen enthalten derzeit nur begrenzte Funktionen, die in absehbarer Zeit ergänzt werden. Bitte verwenden Sie MagCLI für die fehlenden Funktionalitäten.
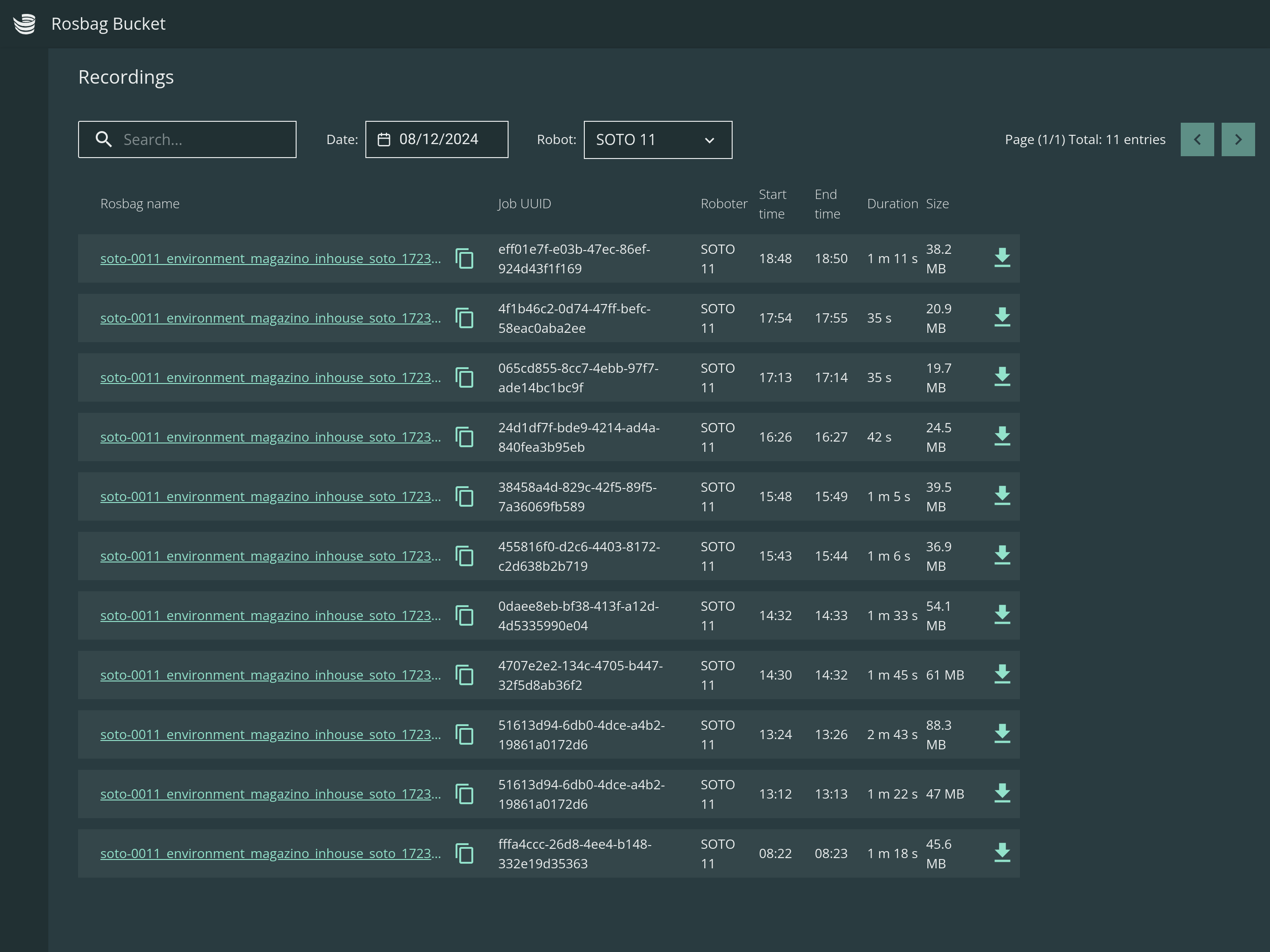
MFM enthält ein ROSbag-Debugging-Tool
MFM enthält jetzt ein ROSbag-Debugging-Tool. Wenn ein Roboter auf einen Fehler stößt, wird ein ROSbag erstellt und automatisch in die Cloud hochgeladen. Die MFM listet diese ROSbags auf, die nach Datum, Uhrzeit, Roboter und Metadaten gefiltert werden können. Sie können die ROSbags herunterladen oder anklicken, um sie in Foxglove zu öffnen und den Fehler zu reproduzieren.
Hinweis: Diese Funktion ist nur auf Anfrage verfügbar.
Schnellere Fehlerberichte für die Lokalisierung
Es wird nun eine Fehlermeldung angezeigt, wenn SOTO fährt, ohne dass die Lokalisierung mit der Karte übereinstimmt. Dies ermöglicht eine schnellere Fehlererkennung, wenn SOTO ein Problem mit der Lokalisierung feststellt.
Verbesserte VDA5050-Navigation
Die Navigationsfähigkeit von SOTO für VDA5050-Befehle wurde verbessert. Dies sorgt für eine zuverlässigere Navigation des Roboters, vor allem in Kombination mit externen Master-Controllern.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.

.gif?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)