Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
Verbesserte KLT-Abgabe für Durchlaufregale
SOTO nimmt jetzt KLTs zügig und ohne Pausen während des Kommissioniervorgangs auf. Dadurch wird sichergestellt, dass die KLTs im Durchlaufregal nach einer Entnahme ungehindert nach vorne gleiten können, so dass Blockaden vermieden werden und alle KLTs für den Greifer zugänglich bleiben.
Verbesserte KLT-Kollisionserkennung
SOTO erholt sich jetzt besser von KLT-Kollisionen, insbesondere wenn ein Kleinladungsträger falsch ausgerichtet ist und mit den Einfuhrhilfen kollidiert. Die Kollisionserkennung ist genauer und ermöglicht präzisere Wiederholungsmanöver und einen reibungsloseren Betrieb.
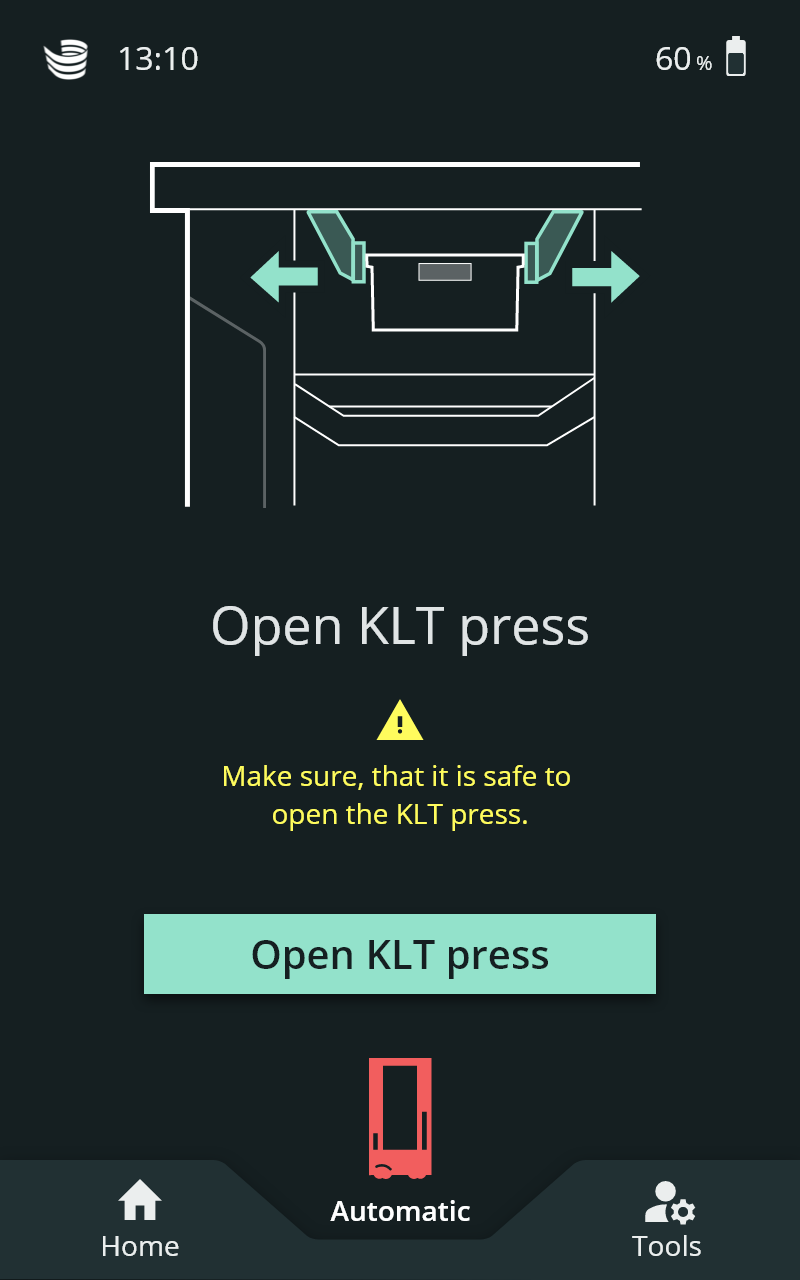
Anleitung zum Öffnen der KLT-Klemme
Das SOTO-Display bietet jetzt eine Funktion zum Öffnen der KLT-Klemme im Bereich „Tools“. Die Funktion ermöglicht die Behebung von Fehlern, bei denen ein KLT in der KLT-Klemme stecken geblieben ist.
Magazino Fleet Manager (MFM)
Geplante Aufträge stornieren
Sie können jetzt im Auftragsmanager Aufträge stornieren, die einem Roboter zugeordnet sind, aber noch nicht in Bearbeitung sind (sogenannte Horizontaufträge). Beachten Sie, dass es nicht möglich ist, Aufträge zu stornieren, die von SOTO aktiv bearbeitet werden.
Erstellen von exklusiven Bereichen für SOTO
Sie können nun exklusive Bereiche innerhalb Ihrer Umgebung definieren, in denen jeweils nur ein Roboter arbeiten darf.
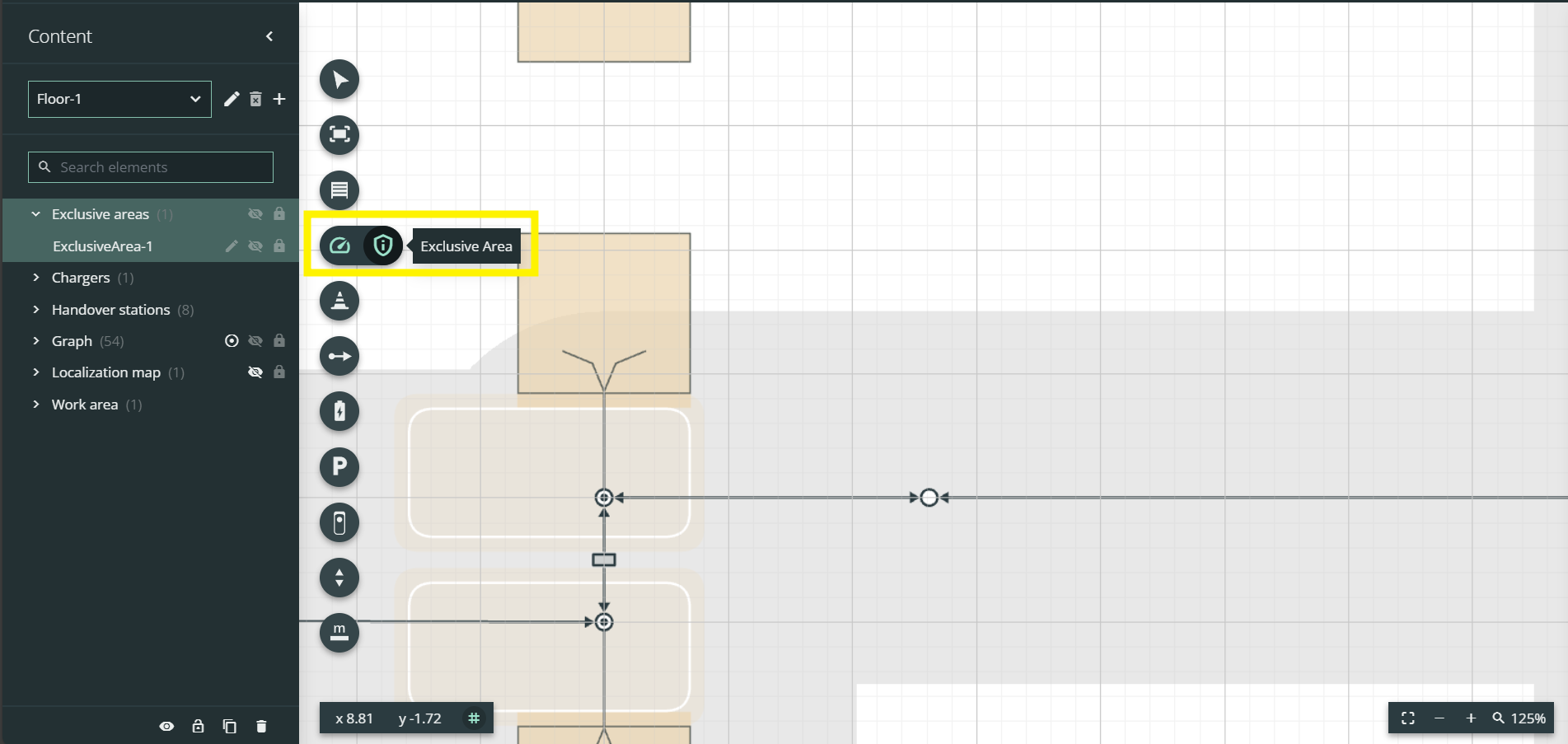
Wie man einen exklusiven Bereich einrichtet:
Rufen Sie den Umgebungseditor auf.
Klicken Sie auf das Symbol für die Geschwindigkeitszone.
Wechseln Sie zu "Exklusiver Bereich".
Zeichnen Sie ein Polygon, um die Grenzen des exklusiven Bereichs zu definieren.
Wenn sich SOTO einem exklusiven Bereich nähert, hält er an und bittet um Zugang. Sobald der Zugang gewährt wird, kann der Roboter einfahren, während andere FTS am Einfahren gehindert werden, bis er den Bereich wieder verlässt. Wenn der Roboter herausfährt, wird die Zugangsbeschränkung aufgehoben.
Umschalten zwischen obere und untere Laserscannerkarte
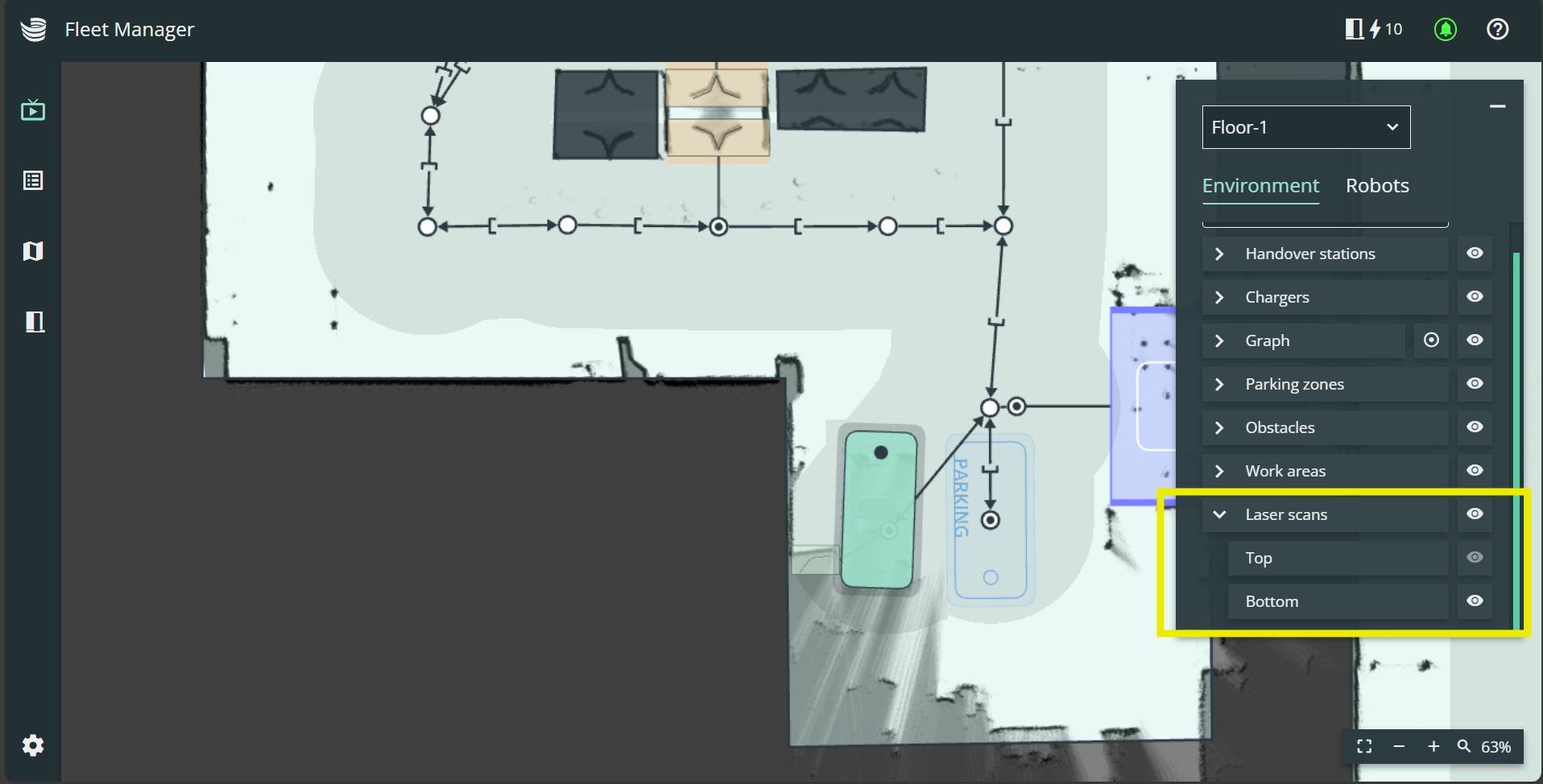
Um in der Live-Ansicht zwischen der oberen und unteren Laserscan-Karte zu wechseln:
Klicken Sie im Linken-Panel auf „Umgebung“.
Verwenden Sie die Sichtbarkeitssymbole auf der rechten Seite, um die obere oder untere Laserscan-Karte auszuwählen.
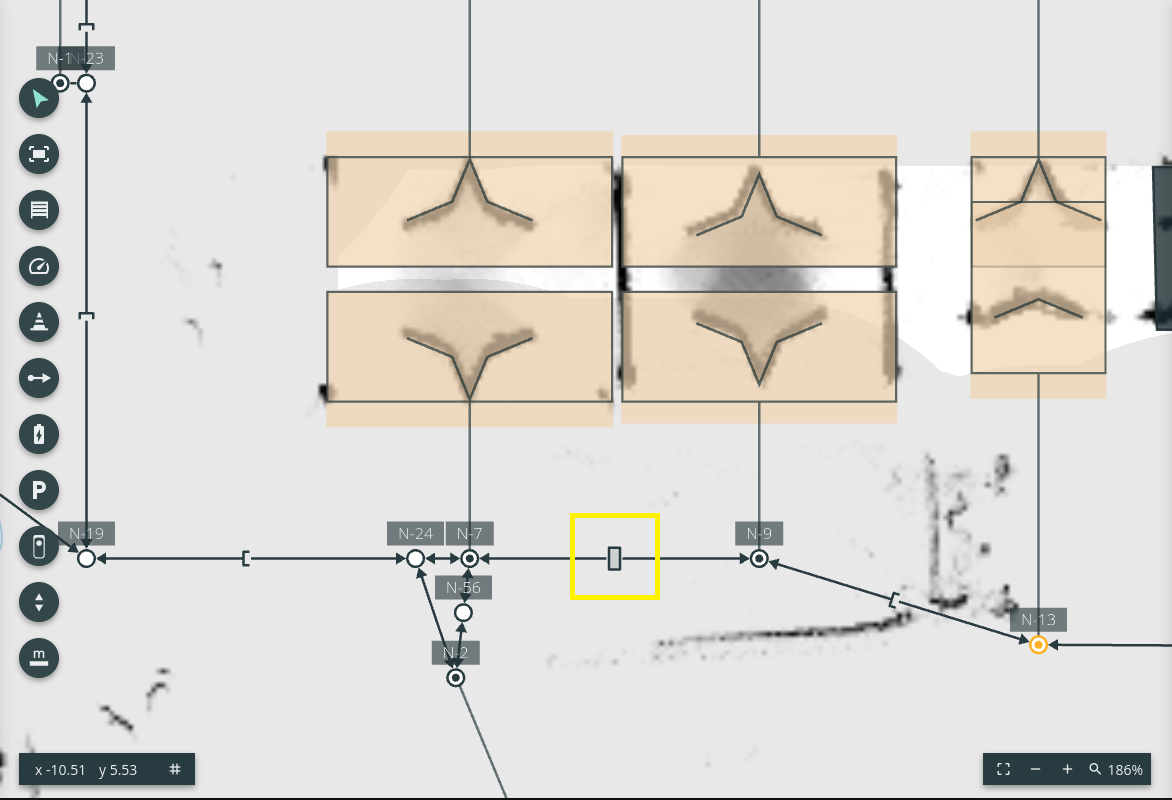
Seitenwechsel-Kanten mit einem Quadrat markiert
Wenn zwei nicht-frontale Übergabestationen miteinander verbunden sind, wird an der Verbindungskante ein quadratisches Symbol für den „Seitenwechsel“ angezeigt. Dieses Symbol zeigt an, dass der Roboter seine Orientierung automatisch an die Andockrichtung der Übergabestation anpasst, an der er die nächste KLT-Übergabe durchführen wird.
Wichtig:
Diese Funktion ist bei Kanten, die zwei nicht frontale Übergabestationen verbinden, standardmäßig aktiviert.
Achten Sie darauf, dass die Docking-Ausrichtungen der angeschlossenen Stationen kompatibel sind.
Wenn sich der Roboter vor dem Andocken in einem engen Gang um 180° drehen muss, kann er möglicherweise nicht an der Übergabestation andocken.
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Roboter- Skills werden in der Datenbank gespeichert
Die Roboter-Skills, die zur Durchführung von Wartungsaufgaben verwendet werden können, werden automatisch in der Datenbank protokolliert. Die Protokolle werden verwendet, um die Ergebnisse der Inbetriebnahme an den Server zu übermitteln, sie können aber auch verwendet werden, um die Interaktionen mit dem Roboter zu verfolgen.
Neue Anleitung für elektronische Bremstests
Auf dem SOTO-Display unter "Einstellungen" > "Roboter-Skills" finden Sie eine neue Anleitung für die Durchführung von elektronischen Bremstests.
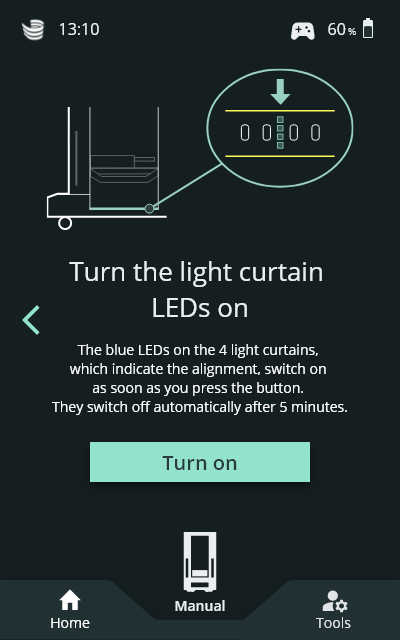
Neue Anleitung zur Überprüfung der Ausrichtung von Lichtvorhängen
Auf dem SOTO-Display unter "Einstellungen" > "Roboter-Skills" finden Sie eine neue Anleitung zur Überprüfung der Ausrichtung von Lichtvorhängen.
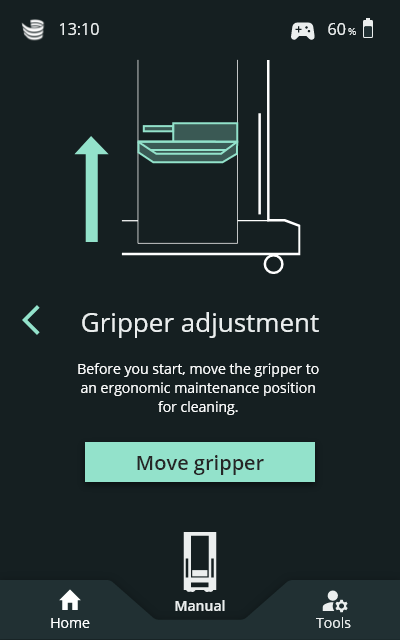
Neues Tutorial zum Bewegen der Förderbänder des Greifers
Auf dem SOTO-Display unter "Einstellungen" > "Roboter-Skills" finden Sie eine neue Anleitung zum Bewegen der Förderbänder bei der Durchführung von Reinigungsaufgaben.
Roboter-Skills auf der Service-GUI zugänglich
Der Service-GUI wurden mehrere neue Roboter-Skills hinzugefügt. Um auf die GUI zuzugreifen, loggen Sie sich zunächst per ssh in den Roboter ein und rufen Sie dann den folgenden Link auf: http://localhost:1234/service-tech
Zu den neuen Skills gehören:
Navigiere zu Fach: Leitet den Roboter zu dem Fach, das in seinem aktuellen Transportauftrag angegeben ist.
Status des Bumpers prüfen: Bietet einen schnellen Überblick über das virtuelle Bumper-Feld.
Batteriestatus und Details zum Ladegerät: Zeigt den aktuellen Status von Batterie und Ladegerät an
Navigiere zum Ladegerät: Schickt den Roboter zu seiner Ladestation.
Bremstest: Enthält eine Anleitung zur Durchführung eines Bremstests während der Wartungsarbeiten.
Klauenbremsentest: Führt einen Klauenbremsentest während der Wartungsarbeiten durch.
Unterstützung für vollständig vordefinierte VDA5050-Fahraufträge
SOTO unterstützt jetzt die vollständig vordefinierte VDA5050-Navigation. Damit wird sichergestellt, dass SOTO die vom Master-Controller vorgegebenen Fahrtrichtungen für alle Kanten einhalten kann.
Navigation Manager Cloud Logging
Um die Genauigkeit der Berichte zu verbessern, protokolliert SOTO nun alle Andockversuche, einschließlich der Wiederholungsversuche, als ein einziges Andockereignis.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.