
Release 2025-01 (M34)
Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
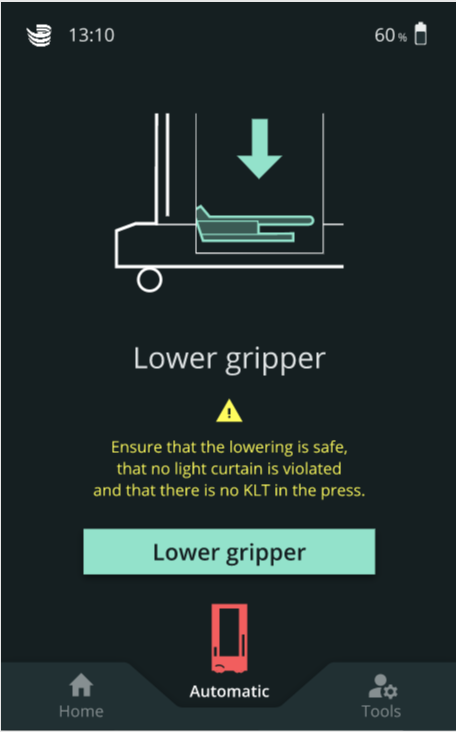
Im Bereich „Tools" gibt es jetzt die Möglichkeit, den Greifer in die unterste Position zu bringen. Dies ist besonders nützlich für die manuelle und ergonomische Entnahme von KLTs aus der KLT-Klemme. Navigieren Sie auf dem SOTO-Display zu „Tools“ und wählen Sie „Lower gripper“. Das Display führt Sie durch das sichere Absenken des Greifers.
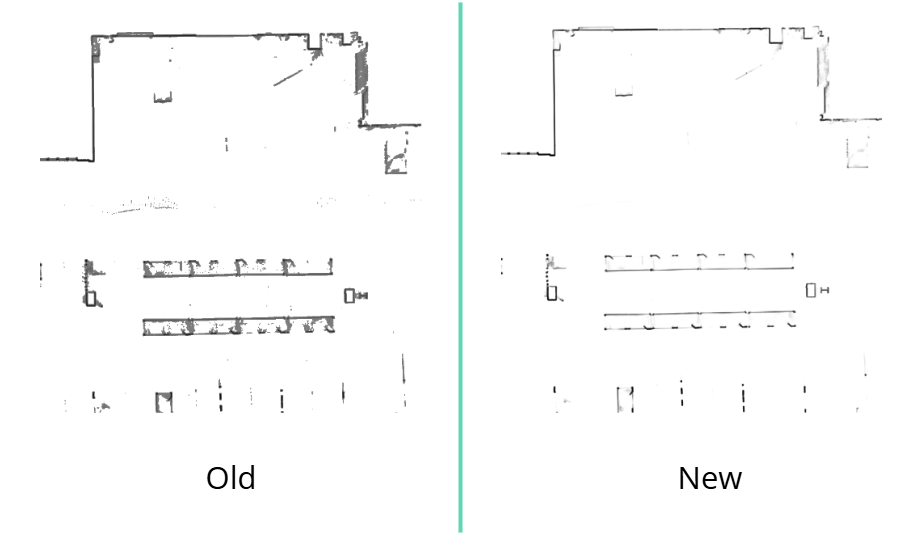
Die Laserkarten, die während der Umgebungserfassung auf dem SOTO-Display angezeigt werden, sind jetzt klarer und deutlicher. Die Konturen von Regalen und Hindernissen sind deutlicher zu erkennen, was die Identifizierung relevanter Objekte wie Wände, Säulen und Andockformen bei der Kartierung und Modellierung der Umgebung erleichtert. Dies erleichtert auch die Platzierung von Übergabestationen im Umgebungseditor.
Magazino Fleet Manager (MFM)
Wenn Sie in der Live-Ansicht auf „Roboter zurücksetzen“ klicken, wird der Roboter zum automatischen Zurücksetzen an die Ladestation geschickt. Sobald er das Ladegerät erreicht, wird er deaktiviert. Der Roboter empfängt dann keine Aufträge mehr von der Leitsteuerung und nimmt keine neuen Aufträge an, bis er manuell im Magazino Fleet Manager (MFM) wieder aktiviert wird.
Hinweis: Wenn ein Roboter zurückgesetzt wird, wird er außer Betrieb genommen und das Rucksackregal geleert (die Anzahl der KLTs wird auf Null zurückgesetzt). Wenn das Rucksackregal KLTs enthält, müssen diese gemäß den Anweisungen des Tutorials aus dem Rucksackregal entfernt werden. Die mit den KLTs im Rucksack verknüpften Transportaufträge werden im WMS standardmäßig „abgebrochen“. Jede weitere Bearbeitung muss direkt in der WMS-Benutzeroberfläche gebucht werden.

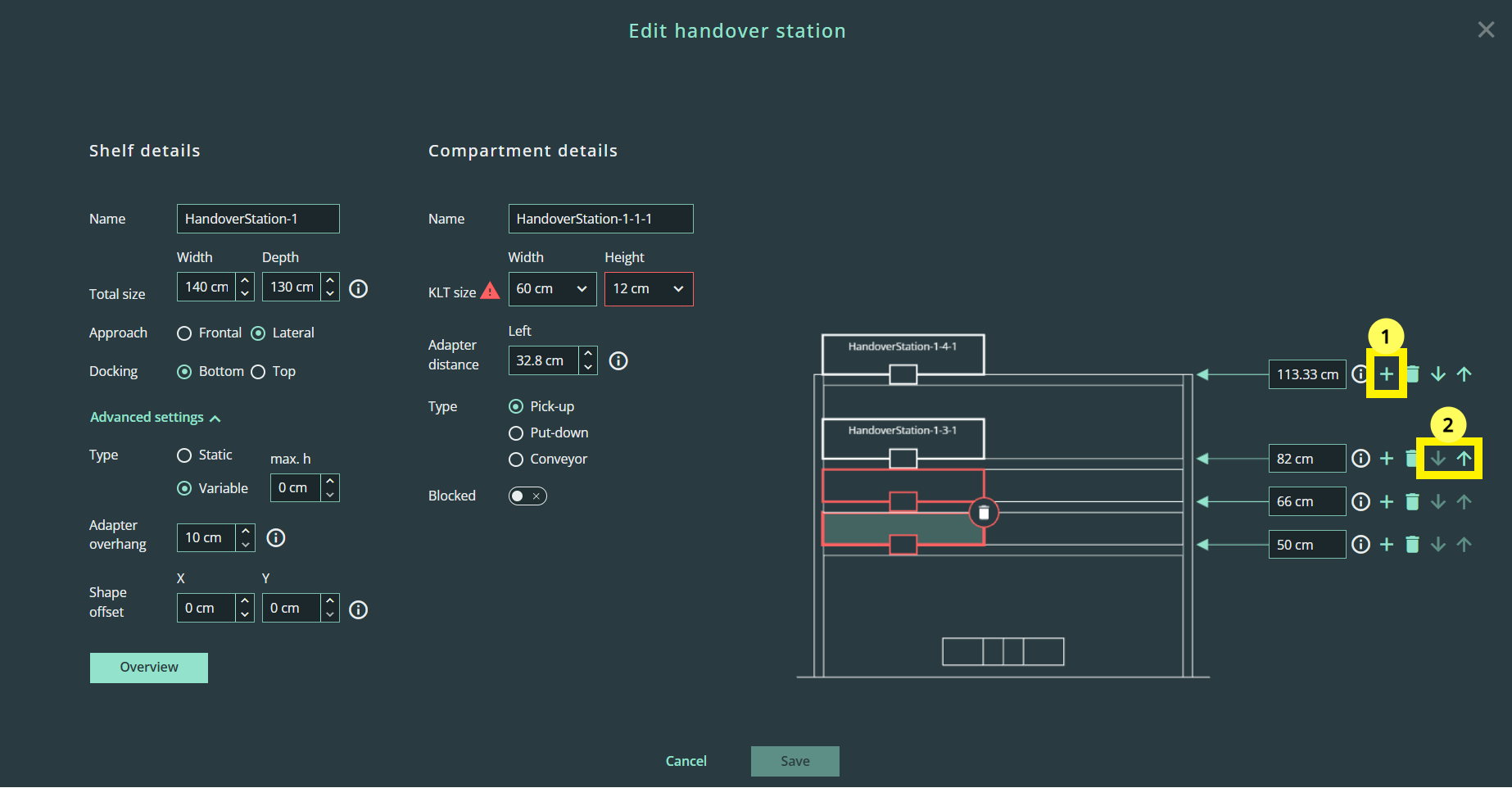
Das Menü zur Modellierung von Übergabestationen wurde vereinfacht. Sie können jetzt:
Neue Fächer hinzufügen, indem Sie auf das Pluszeichen neben dem Eingabefeld für die Höhe der Regalschicht klicken.
Regalebenen über oder unter jeder beliebigen Regalebene hinzufügen, indem Sie auf das Pfeilsymbol klicken.
Warnmeldungen sehen, wenn nicht genügend Platz über dem Fach vorhanden ist.
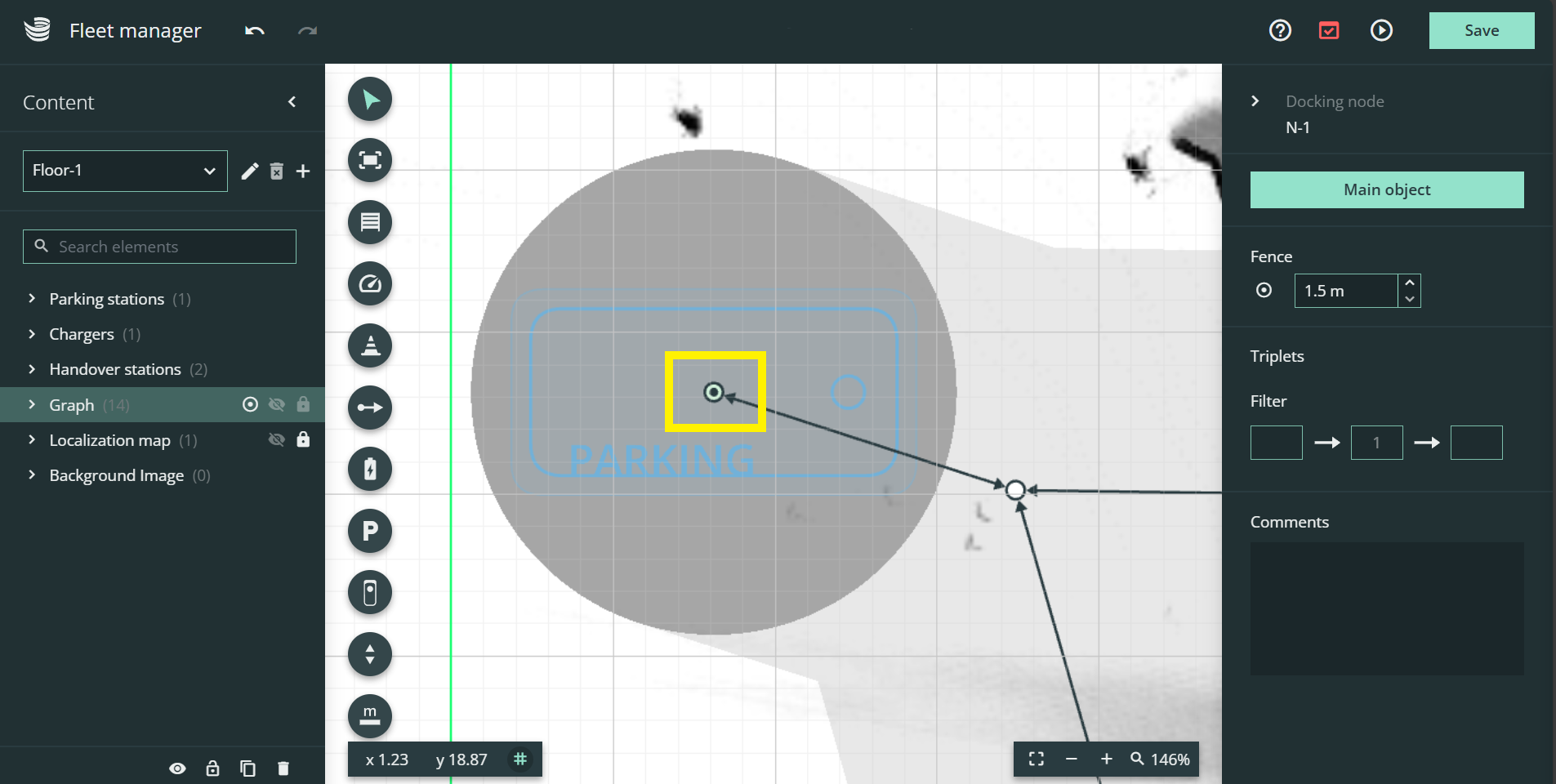
Im Umgebungseditor können Sie einen Parkplatz verschieben, indem Sie auf den Knoten klicken und ihn an die gewünschte Stelle ziehen.
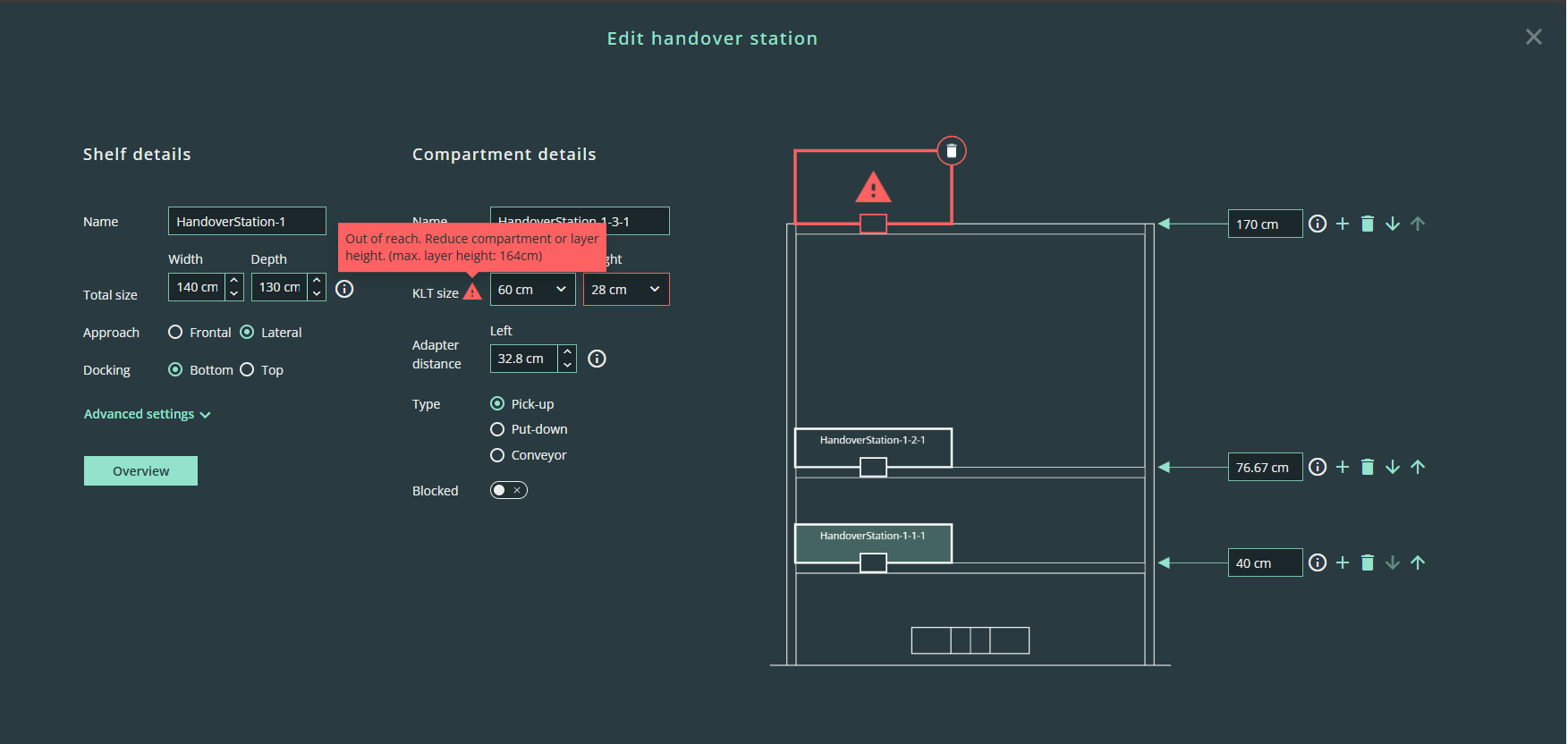
Der Umgebungseditor zeigt jetzt eine Warnmeldung an, wenn die Höhe eines Fachs den maximal zulässigen Wert überschreitet. Passen Sie in diesem Fall die Höhe der Regalebene an, damit SOTO den KLT sicher aufnehmen kann.
Die maximale Übergabehöhe von SOTO beträgt 1700 mm, vorausgesetzt, die KLT-Höhe beträgt 220 mm oder weniger. Weitere Hinweise zu den Übergabehöhen finden Sie im Abschnitt „Übergabestationen“ des Datenblatts.
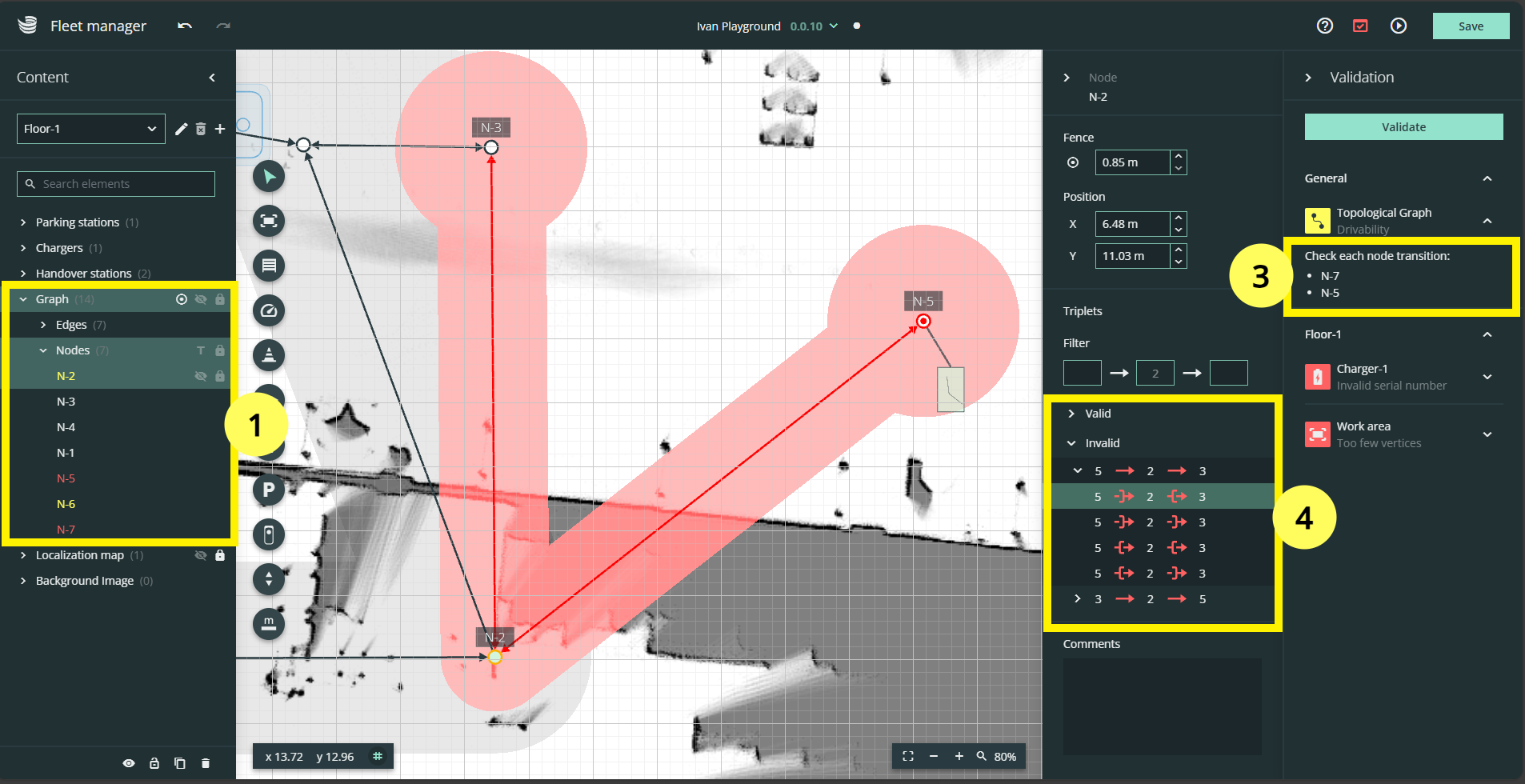
Der Umgebungseditor macht es jetzt einfach, ungültige Übergänge zu identifizieren und zu korrigieren. Um Übergänge zu prüfen, gehen Sie zu „Graph“ und wählen Sie einen Knoten aus dem Dropdown-Menü „Knoten“.
Ungültige Knoten werden in rot angezeigt
Teilweise gültige Knoten (die sowohl gültige als auch ungültige Übergänge enthalten) werden in gelb angezeigt
Sie können auch zu ungültigen Knoten springen, indem Sie die Knoten im Validierungspanel auswählen.
Die Übergänge befinden sich im Abschnitt „Übergänge“, gruppiert in gültige und ungültige Kategorien
Optional: Verwenden Sie die Filter-Eingabefelder, um Ihre Suche auf bestimmte Übergänge einzuschränken
Auf diese Weise lassen sich ungültige Knotenübergänge, die während der Graphvalidierung markiert wurden, leicht identifizieren und korrigieren.
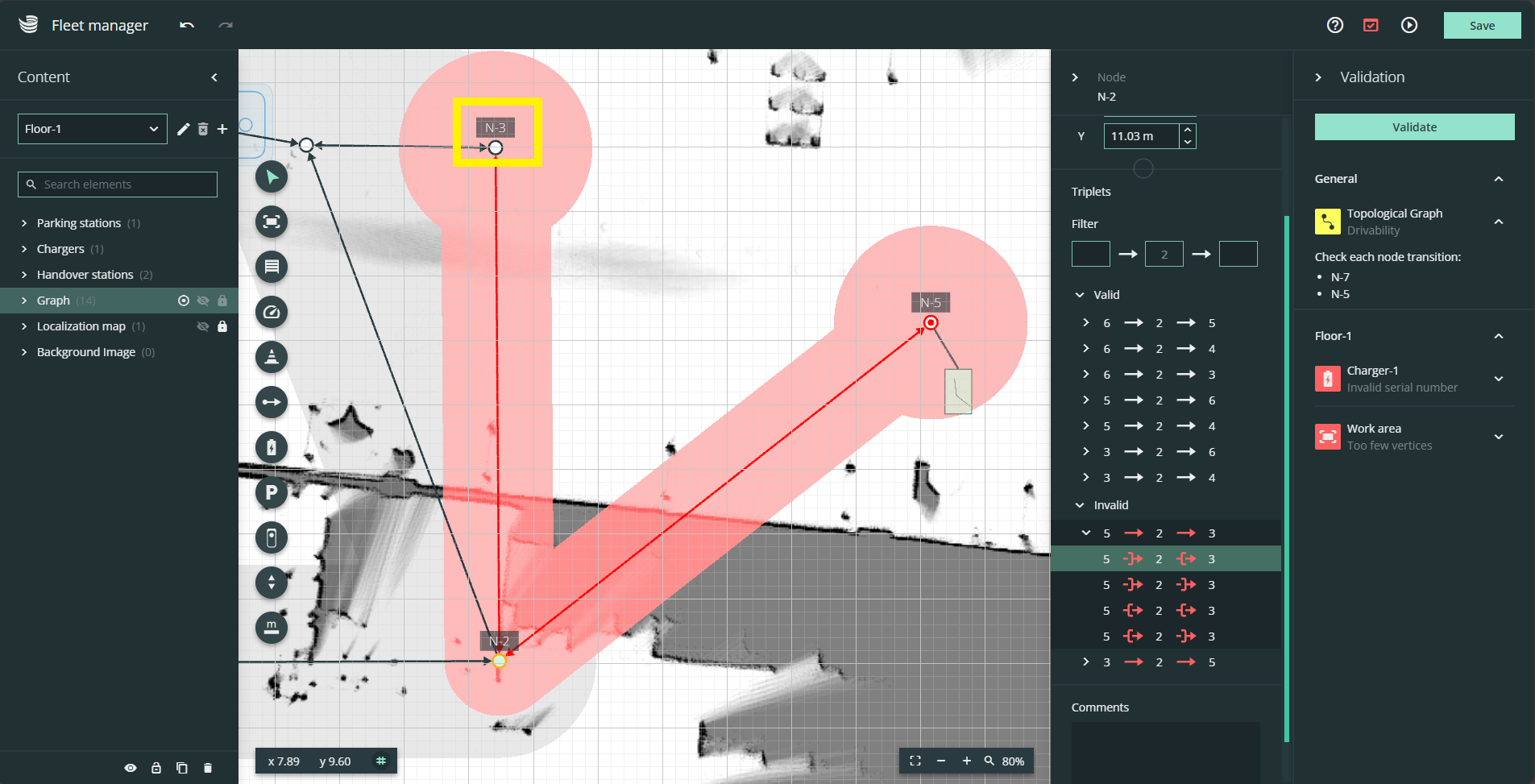
Die Knotennamen werden jetzt auf der Oberfläche des Umgebungseditors angezeigt, wenn ein ungültiger Übergang ausgewählt wird. Der Knotenname wird oberhalb des Knotens angezeigt, und die betroffenen Kanten und Zäune werden rot hervorgehoben. Dadurch wird es einfacher, ungültige Übergänge auf dem Graphen zu erkennen und zu korrigieren.
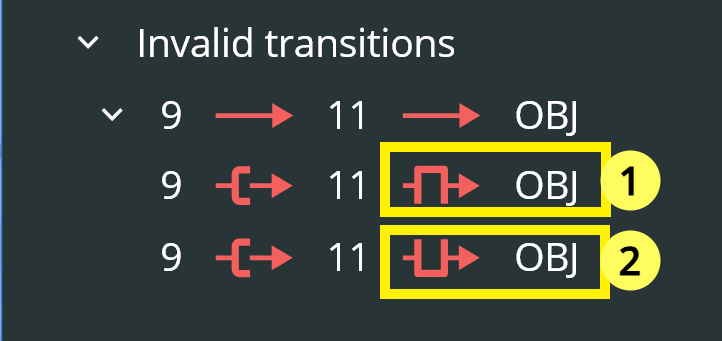
Der Umgebungseditor enthält jetzt neue Symbole, die die Orientierung anzeigen, in der der Roboter an ein Objekt andockt. Diese Symbole erscheinen im Abschnitt „Übergänge“ und sind immer mit einem Objektknoten verbunden.
Die Orientierungssymbole in der Beispielgrafik zeigen:
Andocken an der rechten Seite
Andocken an der linken Seite
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.