Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
Weitere Optimierung der VDA5050-Updates
Die VDA-Kommunikation während der Aktualisierung der Roboterbasis wurde weiter optimiert, wodurch Verzögerungen reduziert wurden. Diese Optimierung baut auf vorherigen Verbesserungen auf und führt zu einem gleichmäßigeren Fahrverhalten und weniger unnötigen Verlangsamungen.
Verbesserte Bumper-Wiederherstellung
SOTO führt nun bei einer Verletzung des Bumper-Feldes präzisere Wiederherstellungsmanöver durch. Zuvor kollidierte SOTO in einigen Fällen mit überhängenden Regalteilen, die für die Sensoren nicht sichtbar waren. Jetzt verwendet die Navigationssoftware die Regaldaten des Flottenmanagers, um diese Kollisionen zu vermeiden, und erhöht so die Sicherheit erheblich.
Bitte beachten Sie, dass diese Funktionsverbesserung nur bei Regalsystemen mit einem maximalen horizontalen Abstand von ca. 10 cm zwischen den Regalfüßen und den überhängenden Teilen möglich ist.
SOTO fährt präziser
Die Navigations- und Lokalisierungsleistung von SOTO wurde verbessert. Dies ist auf einen direkteren Lenkungsrückkanal zurückzuführen, der nun eine präzisere Steuerung ermöglicht.
Weniger Verzögerungen beim Drücken von „Auftrag abbrechen“
Wenn auf dem SOTO-Display „Auftrag abbrechen“ gedrückt wird, fährt der Roboter nun sofort mit der nächsten Aktion fort, die vom Master-Controller geplant wurde. Zuvor hat der Roboter eine neue Anfrage an den Master-Controller gesendet, was zu möglichen Verzögerungen führte. Dies reduziert Störungen durch Fehler und stellt sicher, dass der Roboter weiterhin effizient arbeitet.
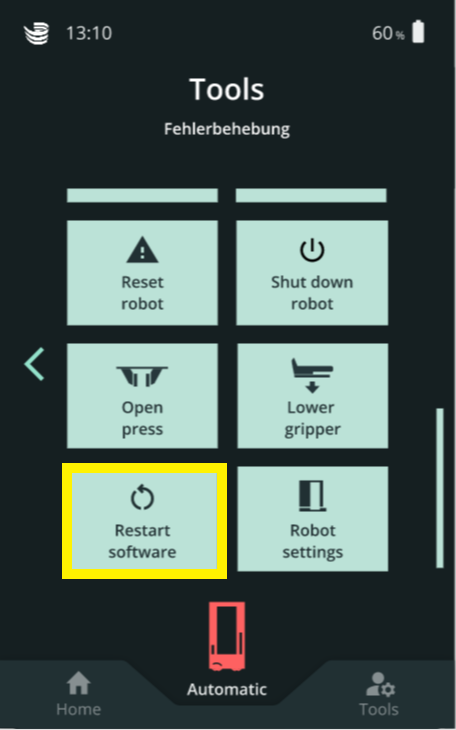
Neue Funktion zum Neustart der Robotersoftware
Das SOTO-Display bietet jetzt eine Funktion zum Neustart der Robotersoftware. Dies kann bei Wartungsarbeiten erforderlich sein und kann durch Drücken von Tools und "Software neu starten" aufgerufen werden.
SOTO rotiert Greifer, um Barcodes besser zu identifizieren
Um die Barcode-Erkennung in hellen Umgebungen zu verbessern, bewegt SOTO seinen Greifer jetzt während einer Neupositionierung leicht nach links und rechts, wenn ein erster Scan fehlschlägt. Dadurch werden reflektierende Lichtquellen, die das Kamerasystem stören könnten, neutralisiert und die Gesamtstabilität verbessert.
SOTO nimmt KLTs auf, wenn die Adaptertiefe unklar ist
SOTO positioniert sich nun automatisch neu, wenn er Schwierigkeiten hat, die Tiefe des Adapters zu bestimmen. Bitte beachten Sie, dass dies in manchen Fällen, z. B. wenn die Größe der QR-Codes nicht ordnungsgemäß ist, zu häufigeren Neupositionierungen führen kann.
Verbesserte Stabilität des Greifers
SOTOs Entriegelungsmechanismus für Regale wurde optimiert, sodass er auch bei Regalen mit variierenden Fachhöhen auf mehreren Ebenen zuverlässig funktioniert. Dies sorgt für eine konsistente KLT-Kommissionierung und verbessert die allgemeine Betriebsstabilität.
SOTO richtet KLTs effizienter
aus
SOTO verwendet die KLT-Klemme jetzt nur noch, um KLTs auf dem Greifer neu zu positionieren, wenn sie relativ zum Rucksackregal falsch ausgerichtet sind. Zuvor nutzte SOTO die KLT-Klemme in einigen Fällen unnötigerweise, um korrekt ausgerichtete KLTs neu zu positionieren. Durch dieses Update wird eine unnötige Verwendung der KLT-Klemme verhindert und die betriebliche Effizienz verbessert.
SOTO kommissioniert 300 x 200 KLTs zuverlässiger
SOTO bietet jetzt mehr Stabilität beim Greifen von 300 x 200 mm KLTs auf der 300 mm Seite. Diese Verbesserung beruht auf einer geringfügigen Reduzierung der Manipulationsgeschwindigkeit, wodurch ein Umkippen der KLTs verhindert und der Prozess im Bedarfsfall rechtzeitig gestoppt werden kann.
Hinweis: Die Aufnahme von 300 x 200 mm großen KLTs aus 300 mm breiten Regalfächern mit KLT-Rotation wird nur in Sonderfällen unterstützt. Solche Aufnahmefächer müssen sorgfältig entworfen und von Magazino genehmigt werden. Eine Neigung von 10 Grad ist erforderlich und es muss sichergestellt werden, dass die KLTs nicht über den Regaladapter hinausragen.
SOTO erkennt festsitzende KLTs zuverlässiger
SOTO nimmt jetzt KLTs zuverlässiger aus dem Rucksackregal auf, da die Erkennung von verklemmten KLTs im Rucksackregal verbessert wurde. Zuvor hatte das System fälschlicherweise erkannt, dass der KLT im Rucksackregal feststeckte, selbst wenn der KLT die Endanschläge erreicht hatte. Dies verbessert die Betriebsstabilität und sorgt dafür, dass der Roboter keine unnötigen Fehler erzeugt.
Magazino Fleet Manager (MFM)
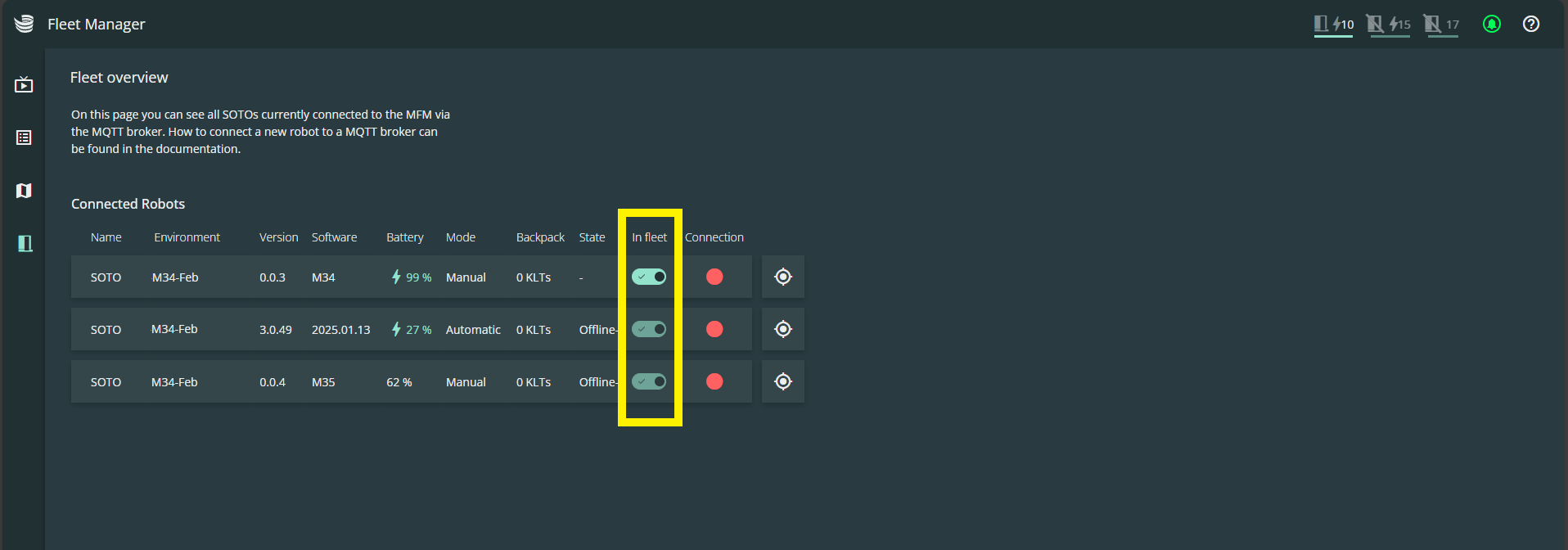
Roboter vorübergehend aus der Flotte entfernen
In der Flottenübersicht können Roboter mithilfe der Schaltfläche „In Flotte“ vorübergehend aus der Flotte entfernt werden. Der Master-Controller ignoriert daraufhin den Roboter und gibt blockierte Navigationsknoten für andere Roboter frei. Dies ist besonders nützlich für Inspektionen oder planmäßige Wartungsarbeiten, da die Deaktivierung eines Roboters lediglich bewirkt, dass er zu einer Ladestation fährt und den Ladestationsknoten blockiert.
Roboter, die aus der Flotte entfernt werden, erscheinen in der Live-Ansicht in transparentem Grau mit einer durchgestrichenen Nummer.
Bitte beachten Sie, dass Roboter in folgenden Situationen nicht aus der Flotte entfernt werden können:
Wenn der Roboter deaktiviert ist
Wenn der Roboter gerade eine Tour absolviert oder KLTs in seinem Rucksackregal hat
Wenn der Roboter zur Ladestation fährt
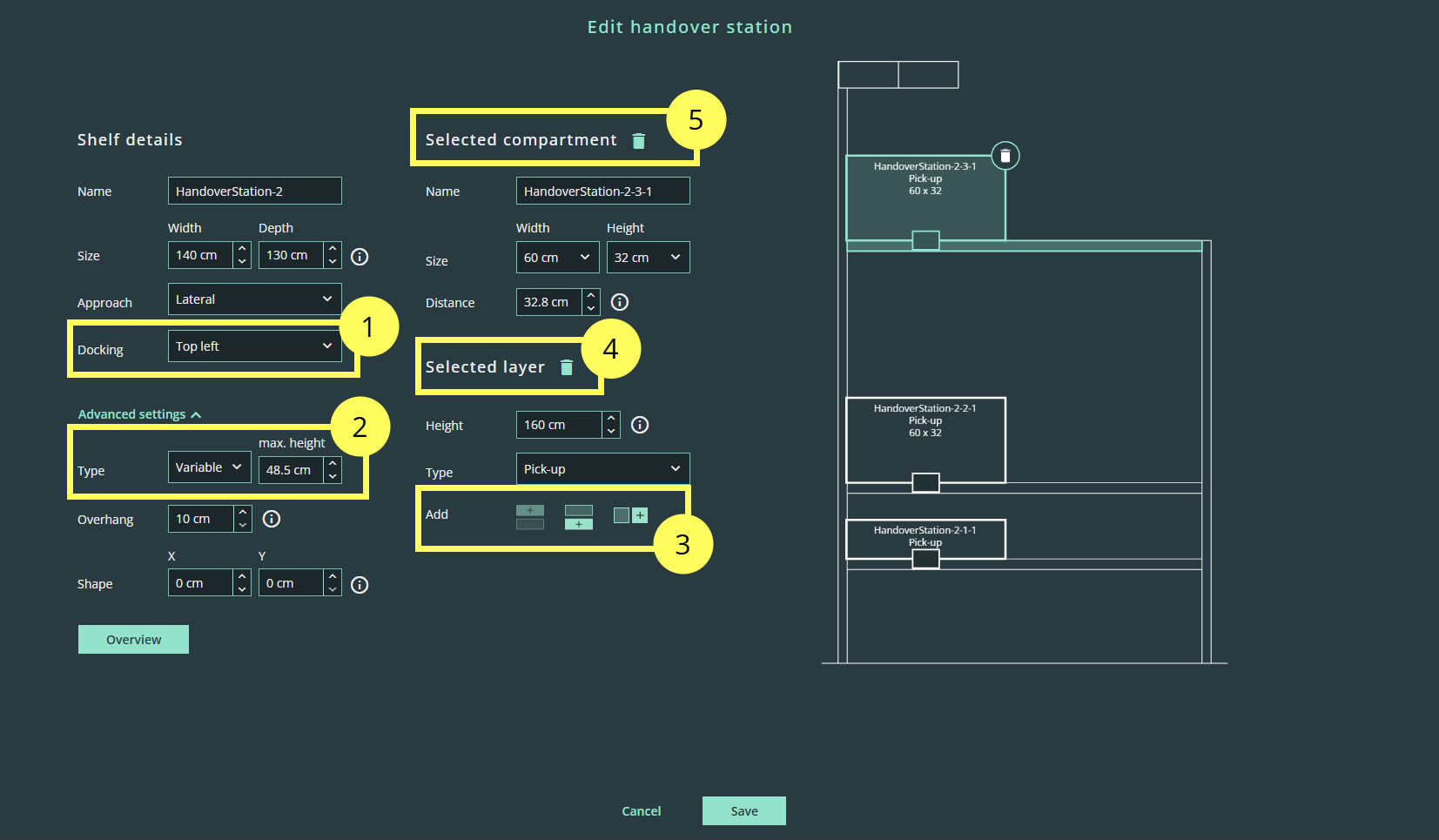
Neues Menü für die Modellierung von Übergabestationen
Ein neues Menü zur Modellierung von Übergabestationen bietet jetzt eine bessere Benutzerfreundlichkeit und präzisere Steuerung. Das Menü enthält folgende Optionen:
Docking-Konfiguration:
Wählen Sie die Andockform im Dropdown-Menü aus. Zur Auswahl stehen: „unten“, „oben links“ und „oben rechts“.
Definieren Sie die Obergrenze für Höhenunterschiede an Übergabestationen mit verstellbarer Höhe in den erweiterten Einstellungen.
Ebenen- und Fachmodellierung:
Fügen Sie Ebenen und Fächer hinzu, indem Sie die Schaltflächen im Abschnitt „Ausgewählte Ebene“ verwenden (die Schaltflächen neben dem Regal wurden entfernt).
Löschen Sie Ebenen, indem Sie auf das Mülltonnensymbol neben "Ausgewählte Ebene" klicken.
Löschen Sie Fächer, indem Sie auf das Mülltonnensymbol neben "Ausgewählte Fächer" klicken.
Bearbeiten Sie mehrere Fächer gleichzeitig, indem Sie die Strg-Taste gedrückt halten und die entsprechenden Fächer anklicken.
Abmessungen können jetzt nur noch mit einer Dezimalstelle eingegeben werden.
Es gibt zudem eine Reihe nützlicher Tooltips, die beim Modellierungsprozess helfen.
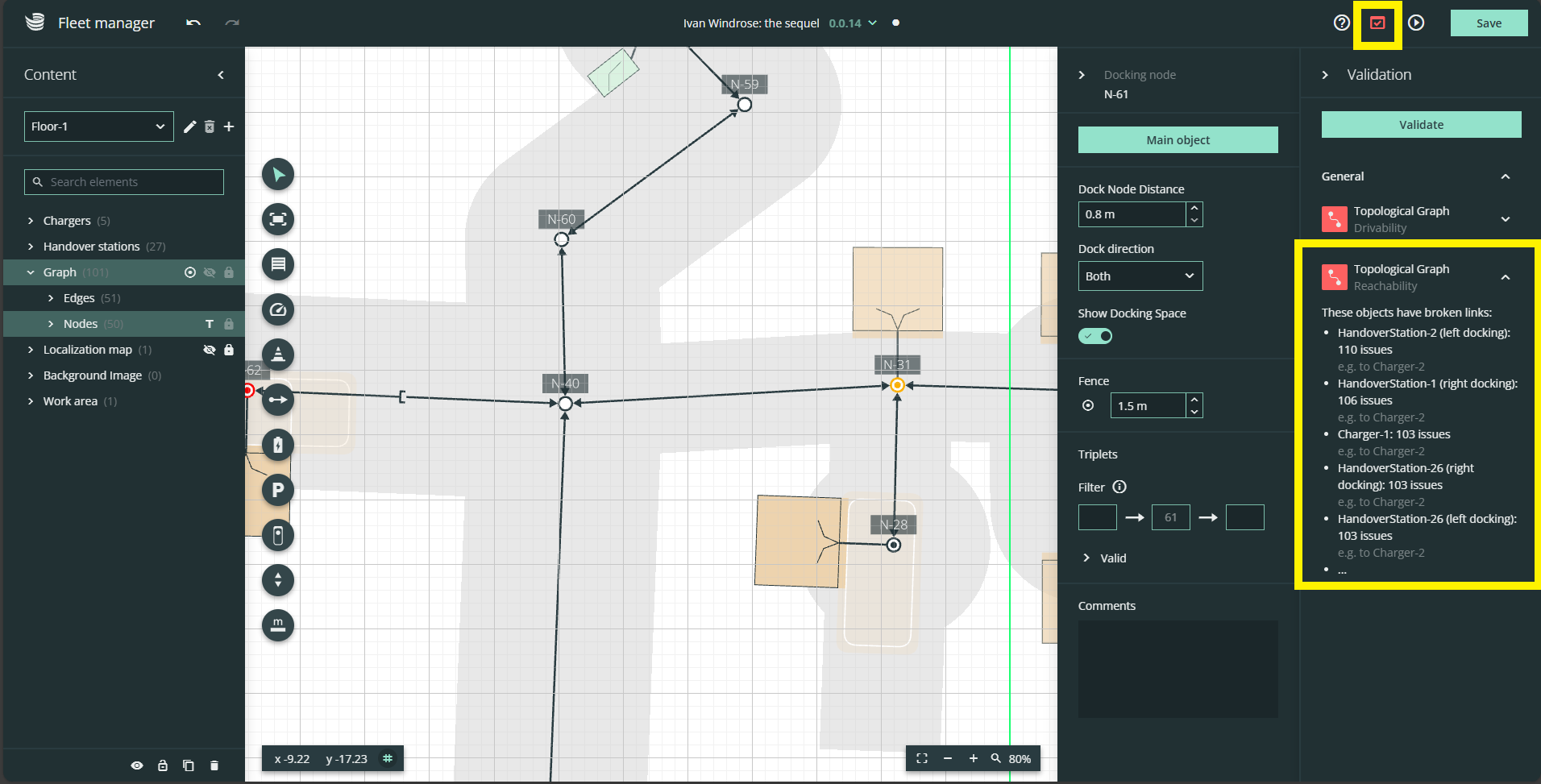
Validieren Sie die Erreichbarkeit von Docking-Knoten
Der Environment Editor enthält jetzt eine neue Validierungsfunktion, um die Erreichbarkeit von Andockknoten (z. B. Übergabestationen, Ladegeräte und Aufzüge) zu überprüfen. Diese Funktion validiert den gesamten Fahrweg (die Kette der Navigationsknoten) zwischen zwei Andockknoten und markiert alle Segmente, die SOTO daran hindern würden, erfolgreich zum Ziel zu navigieren.
Zum Beispiel werden Knotenketten identifiziert, die aufgrund von Orientierungseinschränkungen das Fahren zwischen Übergabestationen verhindern, weil der Roboter nicht genug Platz hat, um seine Orientierung zu ändern.
Um auf diese Funktion zuzugreifen, klicken Sie oben rechts auf „Validieren“ und wählen Sie einen Knoten aus der Dropdown-Liste „Erreichbarkeit“ aus. Weitere Anweisungen finden Sie im Abschnitt "Validierung".
Bitte beachten Sie, dass wir diese Funktion weiter ausbauen werden.
Hindernisse mit exakten Winkeln erstellen
Wenn Sie beim Zeichnen von Hindernissen im Environment Editor die Umschalttaste gedrückt halten, werden Polygone jetzt auf 90° ausgerichtet, was die Erstellung und Bearbeitung rechteckiger Strukturen vereinfacht.
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Wechsel in den Kartierungsmodus, während Fehler aktiv sind
Es ist jetzt möglich, SOTO in den Kartierungsmodus zu schalten, während ein offener Fehler vorliegt. Dadurch können Benutzer den Fehlerbericht bestätigen und versuchen, ihn über den Teach-in-Modus zu beheben.
Neue Roboter-Skills für die Instandhaltung
Im Magazino Maintenance Center stehen Servicetechnikern mehrere neue Roboter-Skills zur Verfügung. Die Benutzeroberfläche unterstützt Techniker bei der Durchführung von Wartungsarbeiten, UVV, Kalibrierungen und Servicefällen. Um auf die GUI zuzugreifen, loggen Sie sich zunächst per ssh in den Roboter ein und rufen Sie dann den folgenden Link auf: http://localhost:1234/service-tech
Zu den neuen Skills gehören:
Blue spotlight control: Schaltet den blauen Scheinwerfer ein und aus
Firmware version: Zeigt die Firmware-Version an
Magcli liefert genauere Werte für Logs
In magcli bietet der Befehl log record data jetzt einen genaueren Zeitrahmen. Der Befehl kann verwendet werden, um ein Protokoll zu erstellen, das zur weiteren Analyse an Magazino gesendet werden kann.
Referenzfahrt der Räder bei Fehlern
Zuvor war es nicht möglich, die Räder während eines aktiven Fehlers zu referenzieren. Jetzt können Benutzer während eines Fehlers in den manuellen Modus wechseln, den Roboter zu einer Ladestation fahren und die Räder referenzieren, unabhängig davon, ob ein Fehler aufgetreten ist.
Die VDA-Schnittstelle unterstützt das Umsortieren des Rucksacks
Die VDA-Schnittstelle unterstützt nun explizit die Aktion REORDER_BACKPACK und ersetzt damit die bisherige Abhängigkeit von Pick-Befehlen. Weitere Informationen finden Sie unter Maßnahmen zur Handhabung von Objekten.
SOTO behält orderId
SOTO behält nun die „orderId“ nach dem Drücken von „resetRobot“ auf der SOTO-Benutzeroberfläche oder über eine „instantAction“ wie „resetAGV“ bei.
Änderung der Feueralarm-API
Es ist jetzt möglich, den MQTT des Brandmeldesystems anzupassen. Die API wurde angepasst, um diese Änderung widerzuspiegeln, und die Nutzlast wurde auf einen booleschen Wert vereinfacht. Weitere Informationen finden Sie in der API-Spezifikation und in der browsable Documentation.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.