Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
Tutorial für blockierte Sicherheitsfelder
Es gibt ein neues Tutorial für den Fall, dass das virtuelle Sicherheitsfeld über einen längeren Zeitraum hinweg blockiert ist. Dies kann auftreten, wenn ein Objekt den Fahrweg von SOTO blockiert. Das Tutorial auf dem SOTO-Display bietet Anweisungen zur Behebung des Problems.
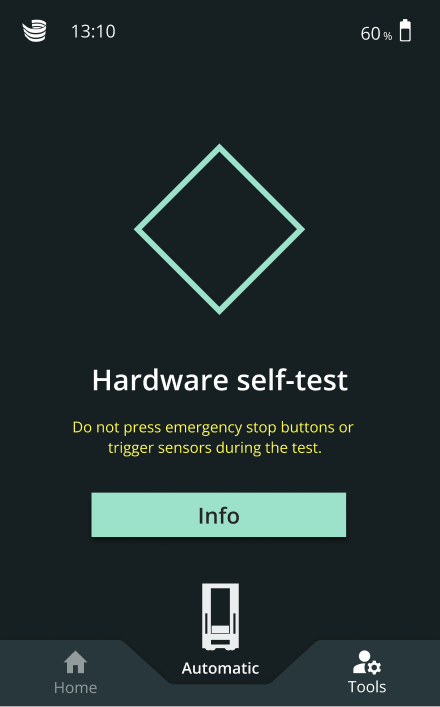
Der Hardware-Selbsttest kann unterbrochen werden.
Der Hardware-Selbsttest kann nun unterbrochen werden, indem der Roboter vom Automatik- in den Manuell-Modus geschaltet wird. Der Selbsttest wird fortgesetzt, sobald der Roboter wieder in den Automatikmodus geschaltet und an ein Ladegerät angeschlossen wird.
Benachrichtigung bei leerem Akku
Wenn der Batteriestand von SOTO 10 % erreicht, wird eine Warnmeldung angezeigt, dass sich der Roboter nach 10 Minuten ausschaltet. Falls der Roboter keine Ladeaufforderung erhalten hat oder manuell betrieben wird, werden Sie in der Anleitung aufgefordert, den Roboter zum Ladegerät zu fahren.
Barcode-Status „Unbekannt“ für Aufnahmen ohne Barcode-Scan
Auf dem SOTO-Display wird die Beschreibung des Barcodes für einen KLT nun als „Unbekannt“ angezeigt, wenn der Roboter angewiesen wurde, einen KLT ohne Scannen des Barcodes aufzunehmen.
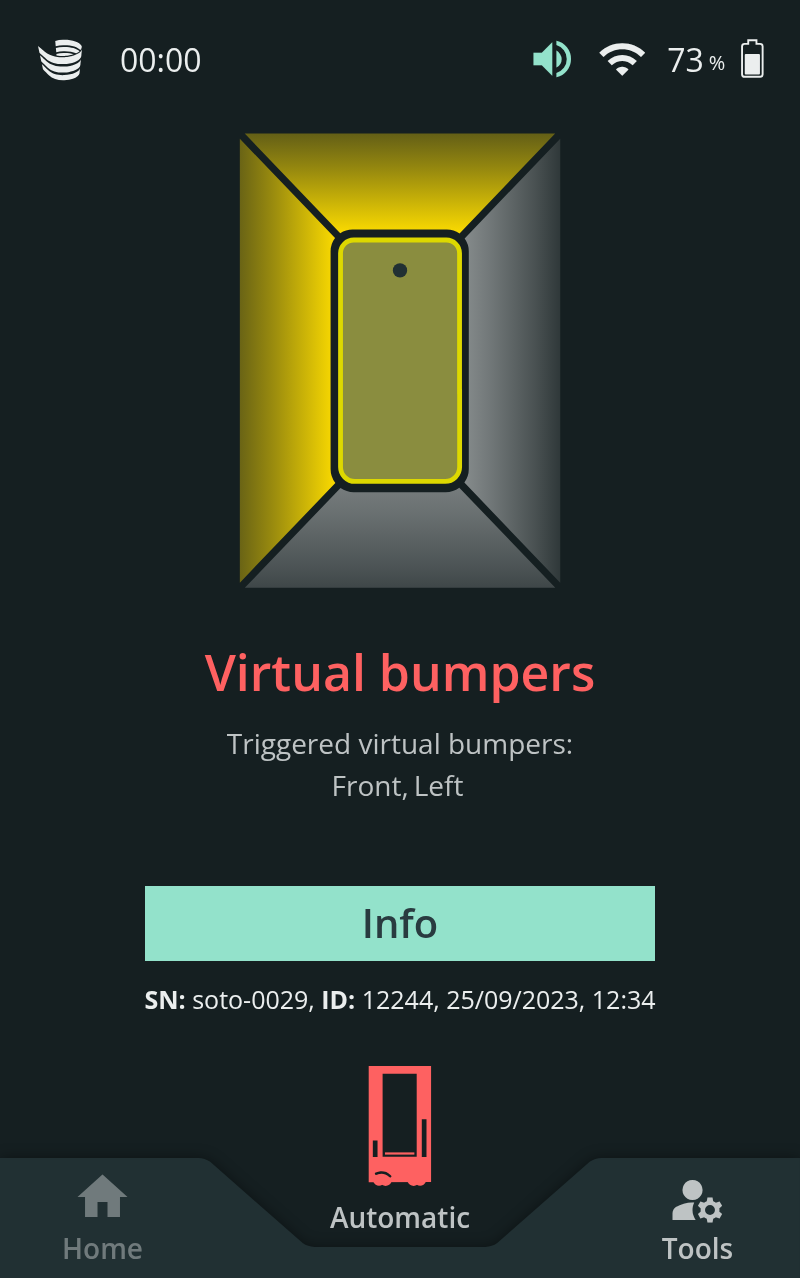
Tutorial für Sicherheitsprobleme
Es gibt eine neue Anleitung für den Fall, dass die Sicherheitsfunktion unerwartet ausgelöst wird. Dies kann daran liegen, dass ein KLT in der KLT-Klemme stecken geblieben ist oder ein ähnliches Hardwareproblem vorliegt. Das Tutorial auf dem SOTO-Display bietet Anweisungen zur Behebung des Problems.
Magazino Fleet Manager (MFM)
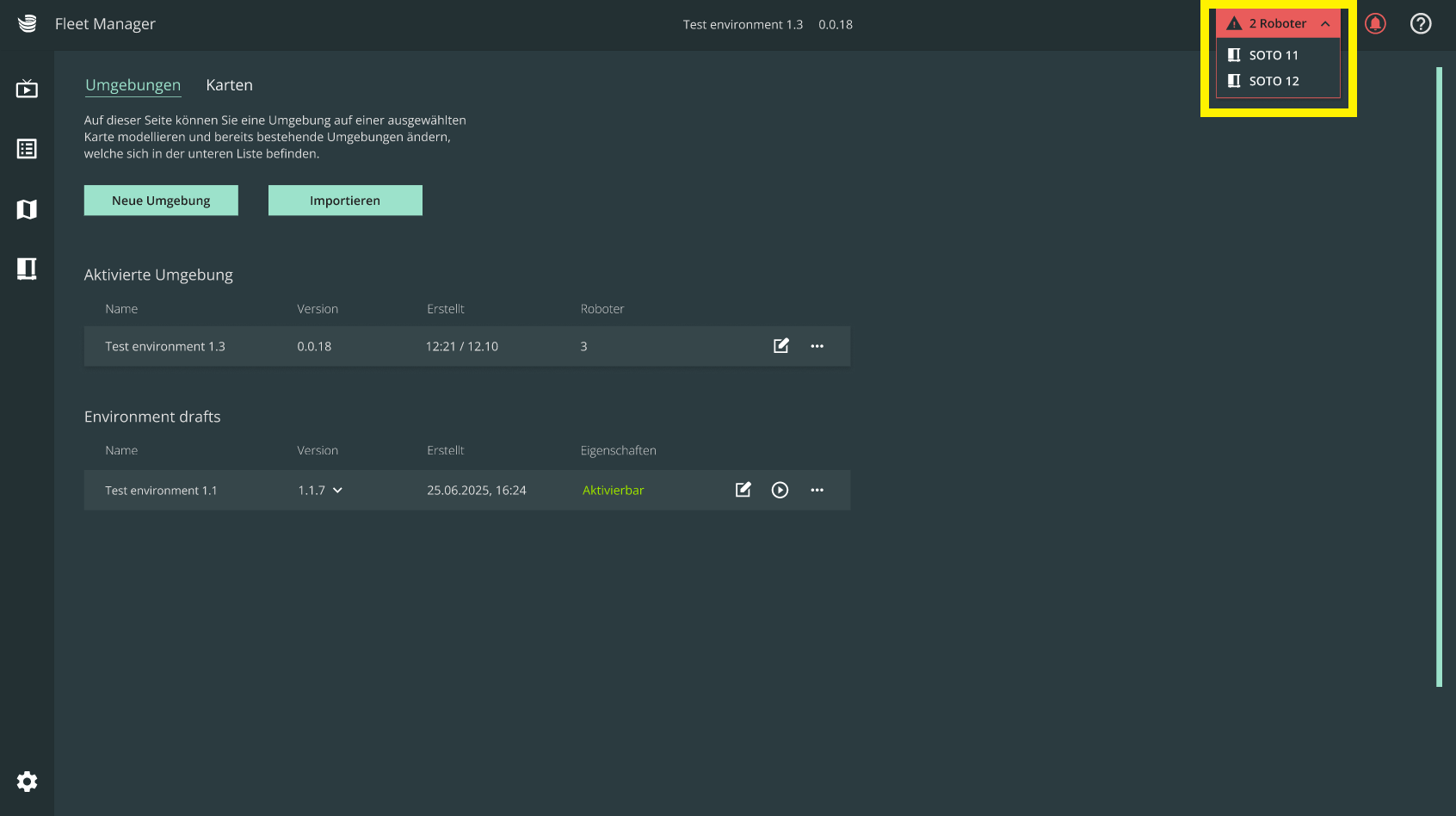
Dropdown-Liste mit SOTO-Robotern in der oberen Leiste
Roboter, die einen Fehler aufweisen, werden nun in einem Dropdown-Menü in der rechten Ecke der oberen Leiste angezeigt. Sie können auf den Pfeil klicken, um jeden Roboter einzeln anzusehen. Wenn alle Roboter wie erwartet funktionieren, gibt es ein Label mit der Aufschrift „Roboter ok“.
Verbesserte MFM Benutzeroberfläche
Das Erscheinungsbild der MFM-Benutzeroberfläche wurde mit einer neuen Schriftart und dem Jungheinrich-Farbschema aktualisiert, um die Benutzerfreundlichkeit zu verbessern.
Push-Benachrichtigungen für mobile Geräte
Wenn Ihr MFM Benachrichtigungen aktiviert hat, können diese nun auch als Push-Benachrichtigungen an Ihr Mobilgerät gesendet werden. Dies ist nützlich, wenn ein Roboter auf einen Fehler stößt und Ihre Aufmerksamkeit benötigt. Bitte beachten Sie, dass Sie, um diese Funktion nutzen zu können, MFM als Webanwendung auf Ihrem Mobilgerät installieren müssen.
Abbilden alternativer Fächer in der Transportmatrix
Wenn Sie die Transportmatrix zum Erstellen von Aufträgen verwenden, können Sie nun ein alternatives Zielfach angeben, falls die Abgabe im ursprünglichen Zielfach fehlschlägt.
Wenn die Abgabe im Zielfach fehlschlägt, navigiert SOTO zum alternativen Regal und versucht, den KLT in das alternative Fach zu legen. SOTO setzt die vorherige Tour fort, wenn der KLT in das alternative Fach abgelegt wird.
Generieren Sie automatisch Retouraufträge im Auftragsmanager.
Wenn Sie die Transportmatrix zum Erstellen von Transportaufträgen verwenden, können Sie nun automatisch Retouraufträge über den Abschnitt „Retourlogik” des Auftragsmanagers generieren. Die Retourlogik ermöglicht es, automatisch einen Retourauftrag hinzuzufügen. Dieser stellt sicher, dass für jeden Transportauftrag, der einen vollen KLT liefert, ein leerer KLT zurückgebracht wird (oder umgekehrt). Die Retourlogik kann in einer CSV-Datei definiert und in den Auftragsmanager importiert werden. Die Daten müssen mit der aktiven Umgebung übereinstimmen.
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Verbesserte Kalibrierung der SOTO-Greiferkamera
Die Kalibrierung der Greiferkamera ist nun robuster gegenüber Störungen aus der physikalischen Umgebung. Daher ist es nicht mehr erforderlich, nach einem optimalen Ort für die Kalibrierung zu suchen, beispielsweise indem der Roboter in der Nähe eines Fensters oder einer Lichtquelle positioniert wird. Während des Vorgangs scannt die Kamera das gesamte Rucksackregal, um das Kalibrierungsmuster zu identifizieren. Das bedeutet, dass Sie das Kalibrierungsmuster, wenn Sie es nicht auf der dritten Schicht des Rucksackregals platzieren können, nun alternativ auf der zweiten oder vierten Schicht platzieren können.
PSS-Test in "Brake Test" (Bremstest) umbenannt
Der PSS-Test heißt jetzt "Brake Test (Bremsentest)". Das Verfahren ist das gleiche wie zuvor.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.

.png?inst-v=b48e44ae-3094-47bc-b26e-6b0cb5b4db37)
.png?inst-v=b48e44ae-3094-47bc-b26e-6b0cb5b4db37)