Diese Veröffentlichung enthält neue Funktionen und Verbesserungen, die SOTO einfacher zu bedienen und effizienter machen.
SOTO
Verbessertes Handling von schwarzen KLTs
SOTO ist besser in der Lage, schwarze KLTs mit reflektierenden Oberflächen zu identifizieren und aufzunehmen.
Verbesserte Fehler-Tutorials auf dem SOTO-Display
Die auf dem SOTO-Display angezeigten Fehler-Tutorials sind jetzt relevanter, und vorherige Softwarefehler wurden behoben, um die Fehlerbehebung zu vereinfachen.
SOTO fährt präziser
Die Fahrleistung von SOTO wurde weiter verbessert, was zu einem präziseren Fahrverhalten und weniger Homing-Fehlern führt.
Softwarefehler beim oberen Laserscanner behoben
Gelegentlich meldete SOTO fälschlicherweise, dass der obere Laserscanner eingeklappt sei. Dieser Fehler wurde nun behoben, sodass ein reibungsloserer Betrieb gewährleistet wird.
SOTO Fleet Manager (SFM)
Umbenennung in SOTO Fleet Manager
Wir freuen uns, Ihnen mitteilen zu können, dass unser Flottenmanagementsystem nach der Übernahme durch die Jungheinrich AG in SOTO Fleet Manager umbenannt wurde. Die Benutzeroberfläche präsentiert sich nun in einem neuen Look-and-Feel, das an die visuelle Identität von Jungheinrich angepasst ist. Während sich das Farbdesign verändert hat, bleiben alle bestehenden Funktionen unverändert. Wir freuen uns darauf, Sie als Teil der Jungheinrich-Familie weiterhin bei Ihren Zielen im Bereich der Intralogistik-Automatisierung zu unterstützen.
Rollenbasierter Zugriff auf SOTO Fleet Manager
Die Funktionen und Anzeige-Berechtigungen des SOTO Fleet Managers können nun über eine rollenbasierte Zugriffskontrolle eingeschränkt werden. Rollen können über App-Rollen im aktuellen Autorisierungsanbieter konfiguriert werden.
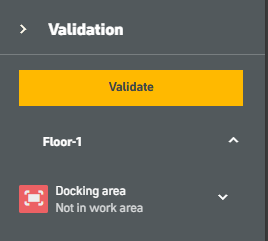
Überprüfung der Platzverfügbarkeit von Andockknoten
Der Umgebungseditor enthält nun eine neue Validierungsfunktion zur Überprüfung des „Andockbereichs” von Andockknoten (z. B. Ladegeräte, Aufzüge, Übergabestationen und Parkzonen) . Diese Funktion überprüft, ob genügend Platz vorhanden ist, damit SOTO an einem bestimmten Andockknoten andocken kann.
Beispielsweise wird festgestellt, ob sich der Andockbereich mit physischen Hindernissen wie Ladegeräten, modellierten Hindernissen oder Regalen überschneidet.
Weitere Anweisungen finden Sie im Abschnitt "Validierung".
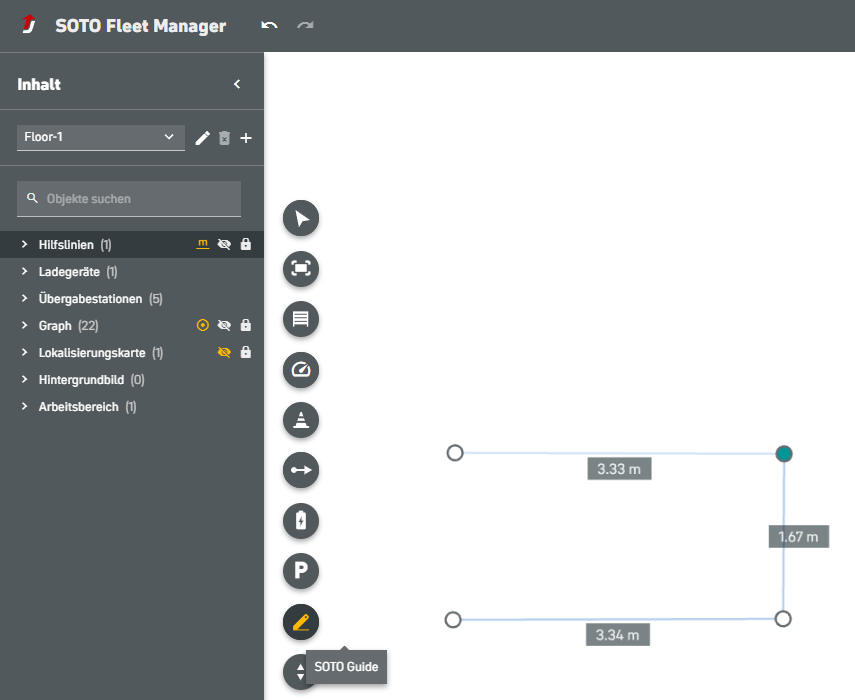
Neues Guide-Lines Werkzeug im Umgebungseditor
Sie können nun mithilfe der Funktion Guide-Lines in der linken Symbolleiste Referenzlinien auf der Karte hinzufügen. Mit diesen Linien können Sie Elemente wie Fußgängerüberwege, Fußwege oder andere Markierungen auf dem Hallenboden kennzeichnen, um während der Modellierung eine visuelle Orientierung zu bieten. Um diese Funktion zu nutzen, bewegen Sie den Mauszeiger über den SOTO Guide und wählen Sie „Guide Lines” aus:
Der Mauszeiger verwandelt sich in ein Bleistift-Symbol.
Klicken Sie auf die Karte, um die Punkte zu setzen, die Ihre Leitlinie definieren.
Dimensionsbeschriftungen werden standardmäßig angezeigt, um Ihnen eine Orientierung zu geben.
Drücken Sie Enter, um die aktuelle Zeile zu vervollständigen.
Dies ist besonders nützlich, wenn Sie Fahrwege in der Nähe von Fußwegen oder anderen Hallenmarkierungen erstellen oder anpassen.
Technische Spezifikationen
Dieser Abschnitt enthält detaillierte Informationen über die technischen Daten von SOTO. Diese Informationen sind für technische Experten gedacht, die das Innenleben von SOTO verstehen müssen, um den Roboter zu implementieren, Fehler zu beheben oder seine Leistung zu verbessern.
Verbesserte magcli-Befehle zum Abrufen von Blackbox-Dateien
Die Befehle magcli log wurden verbessert:
Einführung des Unterbefehls debug
Verbesserter Exception-Report
Verbesserte Dateien in den Blackboxen
Befehl ls eingeführt
Unterstützung für Simulationsmaschinen hinzugefügt
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.