
TORU 5.5 Inbetriebnahme
Technische Daten

Bezeichnung | Bezeichnung | ||
|---|---|---|---|
Nennkapazität | 30 kg | Nominale Kapazität | 100 Ah |
Masse | 230 kg | Antriebsleistung | 2 × 534 W |
Akku-Typ | LiFePo4 | max. gewicht pro Objekt | 3 kg |
Gewicht der Batterie | 8 × 2.8 kg | Schnittstelle | 2.4 und 5 GHz |
Spannung der Batterie | 24 V |
Richtungsangaben
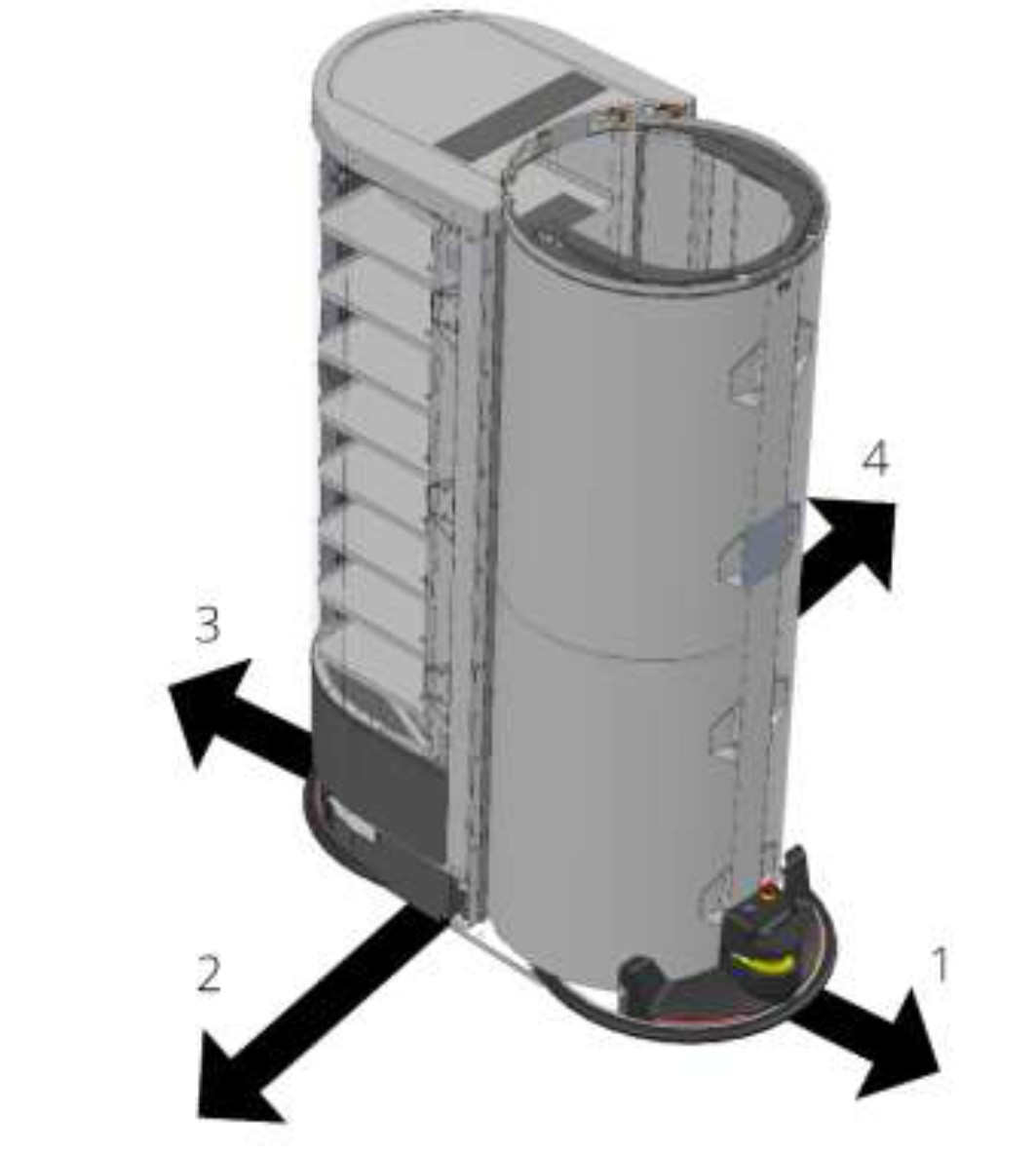
1) vorne, 2) rechts, 3) hinten, 4) links
Die Richtungsangabe bezieht sich auf die Hauptfahrtrichtung.
Der Roboter kann sowohl vorwärts als auch rückwärts fahren. Die aktuelle Fahrtrichtung des Roboters wird durch die LED-Balken an der Vorder- und Rückseite angezeigt. Der LED-Balken in Fahrtrichtung leuchtet weiß, der LED-Balken entgegen der Fahrtrichtung leuchtet rot.
Kontrolle des ausgeschalteten Roboters
Nur Servicepersonal
Nach dem Entladen und Auspacken des Roboters ist es empfehlenswert, den Roboter auf Beschädigungen und Vollständigkeit zu überprüfen.
Anforderungen:
Der Roboter ist vollständig ausgepackt.
Die Transportsicherungen wurden entfernt.
Der Roboter ist ausgeschaltet.
Zu überprüfende Positionen:
Fester Sitz der Gehäuseteile.
Fester Sitz der Not-Halt-Taster.
Fester Sitz des Schlüsselschalters.
Integrität der Gehäuseteile.
Integrität der optischen Hauben der Sicherheitslaserscanner.
Integrität der Fenster, Sensoren.
Reibungsloser Betrieb der Turmdrehung.
Leichtgängigkeit beim Schieben des Roboters.
Verriegelung der Rucksackregal-Tür.
Wenn alle Positionen überprüft und für in Ordnung befunden wurden, kann die Stromversorgung eingeschaltet und die Überprüfung des eingeschalteten Roboters durchgeführt werden.
Kontrolle des eingeschalteten Roboters
Nur Servicepersonal
Voraussetzungen:
Bei der Überprüfung des ausgeschalteten Roboters wurden keine Mängel festgestellt.
Der Turm drehte sich in Richtung des Rucksacks.
Ausführung:
Schalten Sie den Roboter über den Schlüsselschalter ein.
Überprüfen Sie den Ladezustand der Akkus. Laden Sie den Roboter bei Bedarf auf.
Homen Sie den Roboter.
Fahren Sie eine kleine Strecke mit dem Roboter und prüfen Sie, ob die manuellen Anweisungen richtig umgesetzt werden.
Kalibrieren Sie die Kameras.
Wenn alle Schritte ohne erkennbare Fehler durchgeführt wurden, kann der Roboter in Betrieb genommen werden.