
Commissioning
Technical data
Physical footprint (L × W) | 2146 × 1060 mm | Maximum battery capacity | 84 Ah |
Virtual footprint (L × W) | 2430 × 1280 mm | Average operating voltage | 51.2 V |
Altitude (in operation) | 2240 mm | Empty weight | 733 kg – 777 kg 741 kg with default backpack configuration |
Maximum speed | 1.5 m/s | Maximum weight per KLT | 20 kg |
Maximum battery life | Up to 8 hours | Maximum payload | 207 kg – 251 kg 243 kg with default backpack configuration |
Charging duration | 1.6 hours | Maximum battery capacity | 84 Ah |
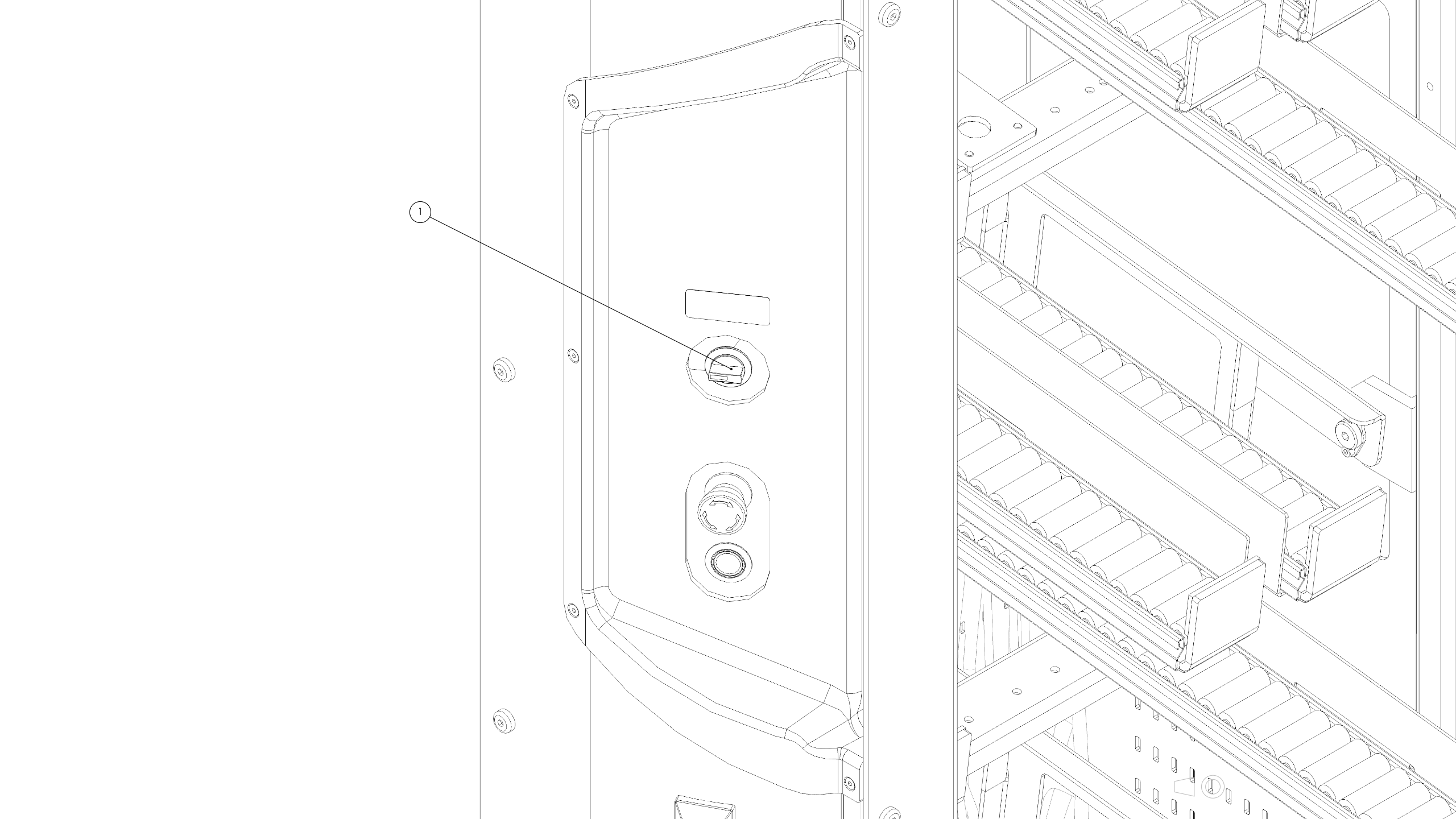
Switching on the robot
ITEM NO. | DESCRIPTION | PART NUMBER |
1 | power switch | 1018517 |
SOTO 2.1 can be switched on via the power switch at the rear left of the backpack. Optionally, the power switch can also be designed as a key switch so that the robot can be secured against being switched on again in the event of maintenance.
Turn the power switch (1) clockwise.
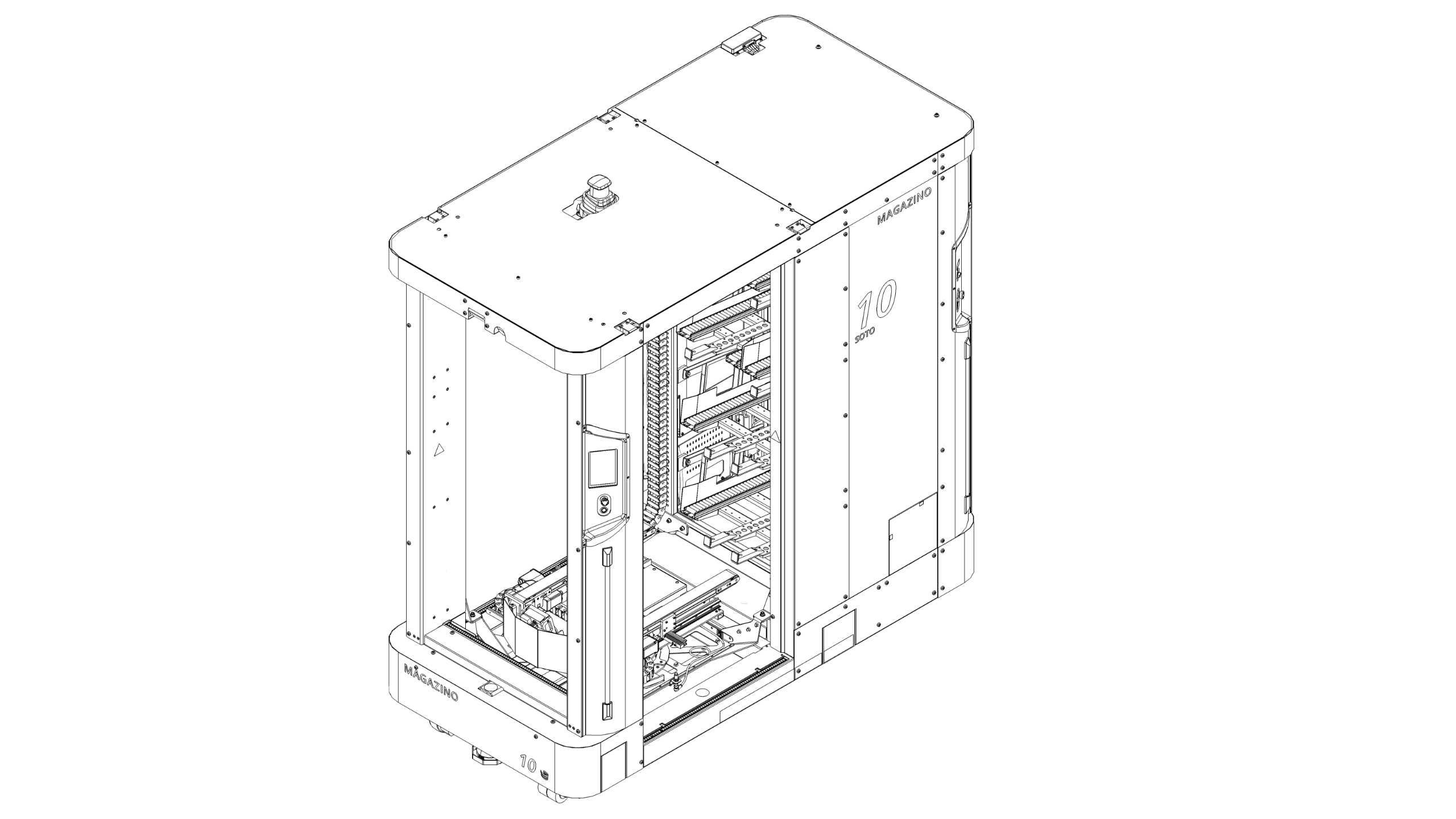
Directional information
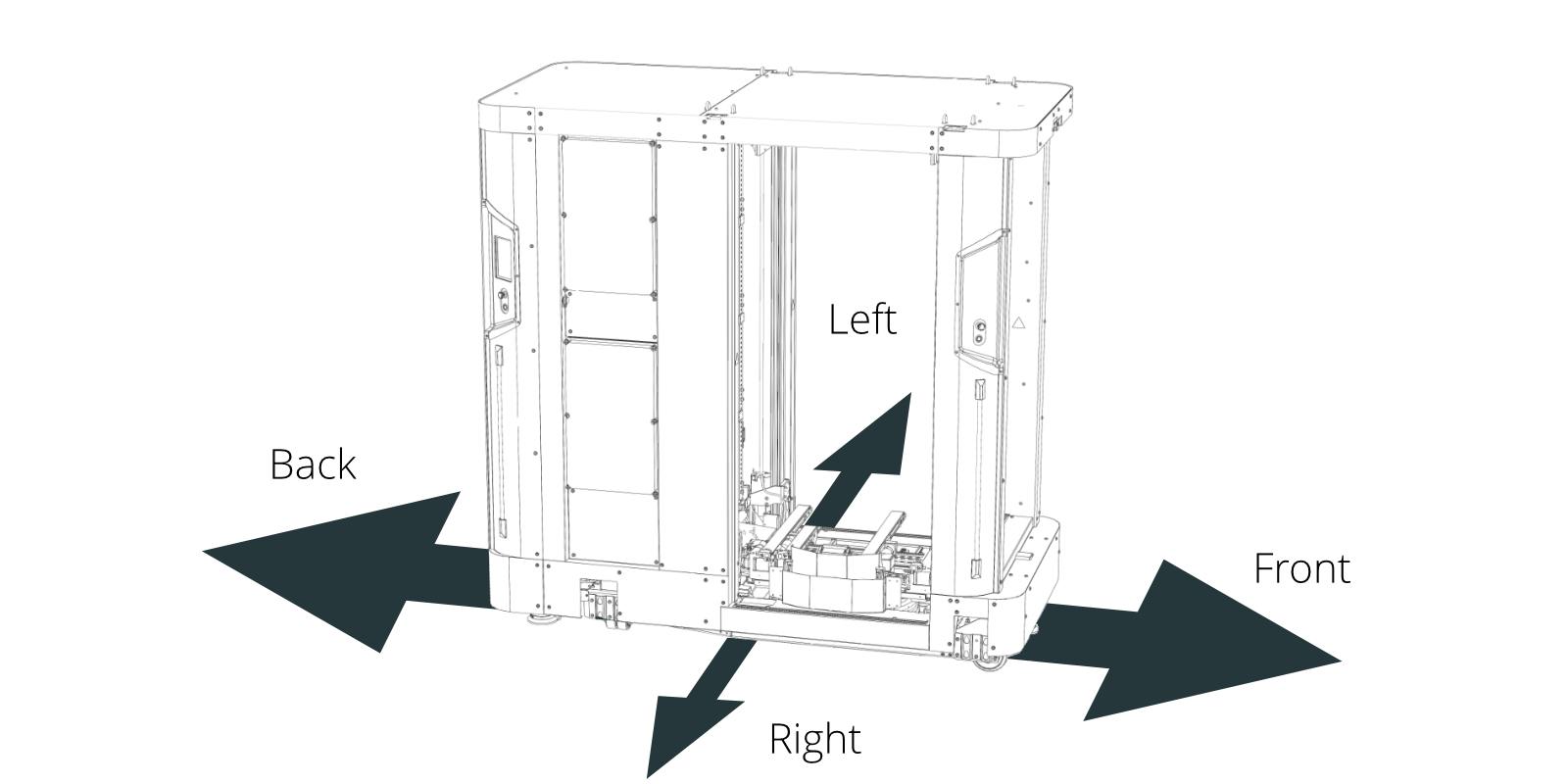
SOTO 2.1 has an omnidirectional drive. The main travel directions to the front and rear, is along the longitudinal axis, the secondary travel directions to the left and right, is along the transverse axis of the robot.
Driving in the fast speed is possible only in the main driving direction. Travel in the secondary travel direction is only permitted at the safe speed.
Generate workspace
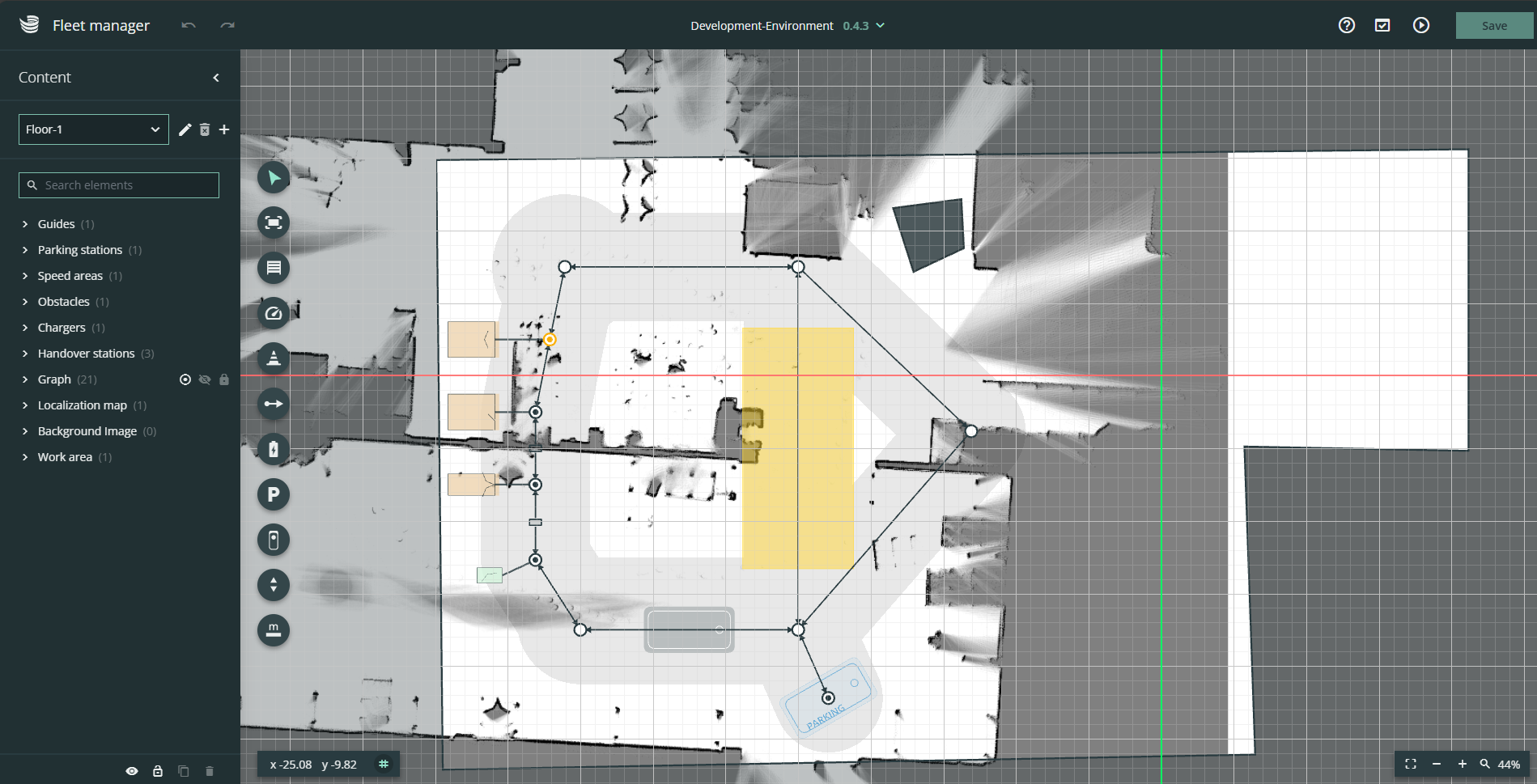
In order for the robot to start working, a new workspace must be created, or an existing workspace must be loaded onto the robot.
To create or load a workspace, follow the “Environment Editor Manual” instructions.