This release includes new features and improvements that make SOTO easier to use and more efficient.
SOTO
SOTO is able to recover from funnel collisions
SOTO is now better able to recover when the KLT collides with the funnel. By using the 3D cameras of the gripper, it can correct both the KLT's position on the gripper and use the KLT press if the KLT is significantly offset from the compartment. This improves robustness during live operation.
Note: This recovery process is only possible if the KLT is placed with the wide side first.
SOTO places KLTs deeper into shelves
SOTO now places KLTs slightly deeper into shelves (i.e. farther behind the adapter) during put-down procedures. This improves stability and reduces errors such as aborted putdowns or KLTs not rolling down the flow rack correctly.
SOTO charges the battery at 60A
SOTO charges at a higher current of 60A, reducing charging time from 0% to 100% by approximately 15 minutes compared to the previous 50A setting.
Please note that the charger may adjust its current output to manage power consumption, so it may not always deliver a full 60A.
SOTO picks up KLTs more efficiently
SOTO now picks up KLTs from shelves more efficiently. The robot begins by docking to one section of the shelf and completing each pick. After completing a section, it moves to the next one and continues the picking process. This method reduces the number of times the robot needs to dock to the shelf and makes the supply process more efficient.
SOTO can have a unique name
Each SOTO robot can have a unique, customized name displayed in both MFM and on its own display. Note that name changes must be performed by a Magazino Deployment Engineer or integrator upon request.
SOTO emits sound alerts
SOTO now emits an acoustic warning signal to alert bystanders when the robot is blocked or encounters an error.
Note: This feature may not be present in older SOTO models.
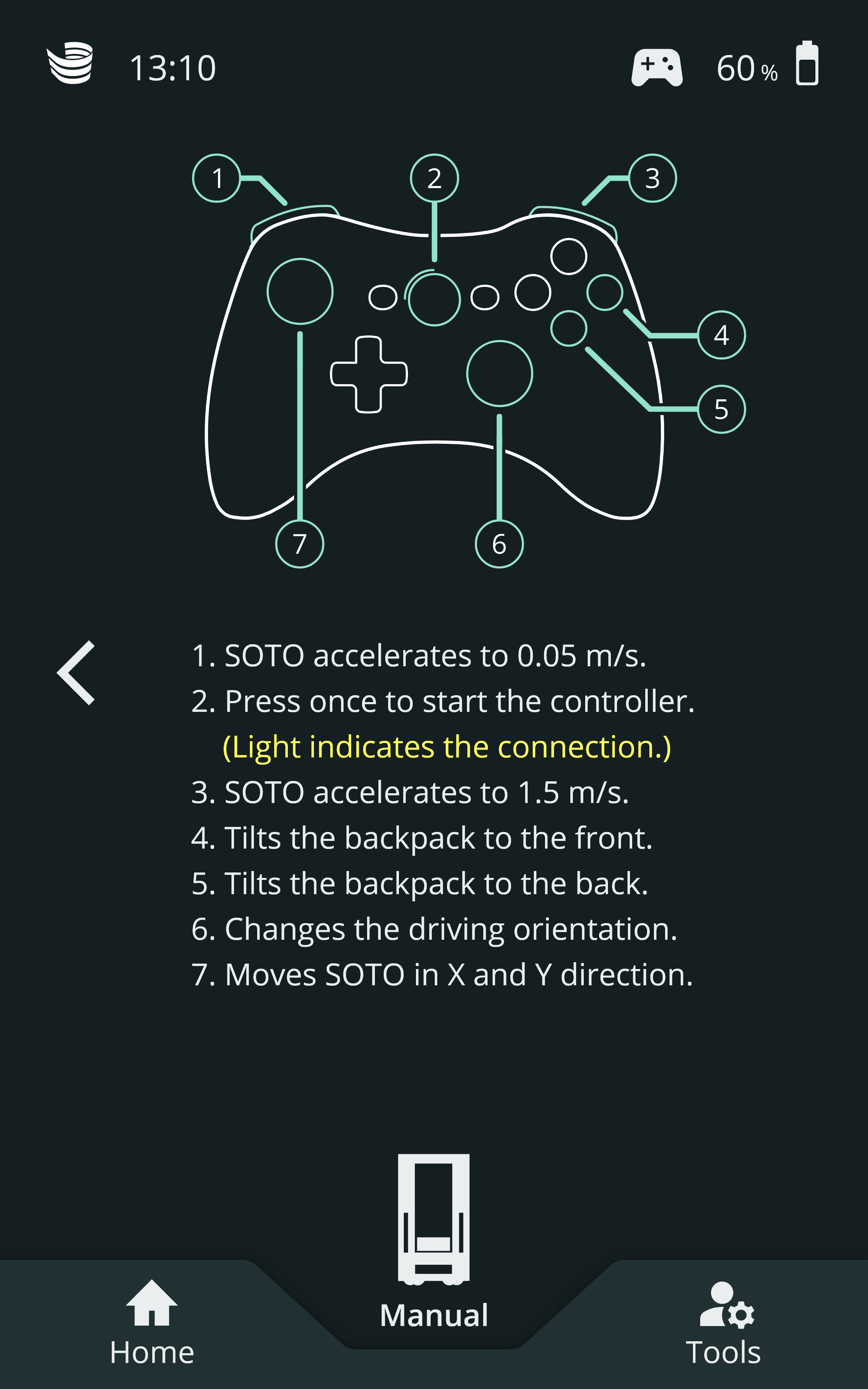
Hand-held controller legend
When connecting the hand-held controller to SOTO, the display will provide a legend explaining the function of each button on the controller for easy reference and operation.
Improved KLT tracking
SOTO is now better able to identify and track KLTs, even when the KLTs are dark colored. The 3D camera on the gripper regulates light exposure to capture better depth data for more reliable tracking.
Improved barcode detection
The 2D barcode identification has been improved, especially for barcodes that have a module size of 0.5mm. This increases the reliability of KLT-tracking during operation.
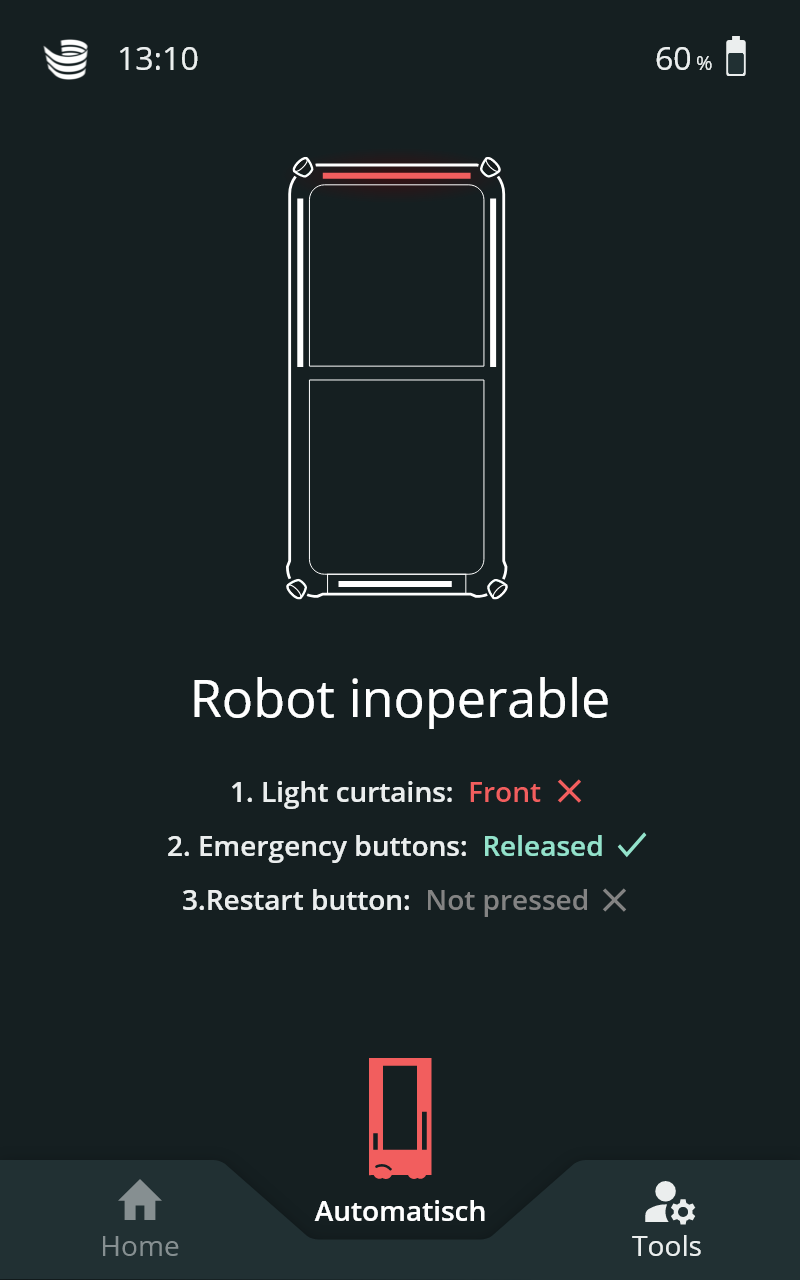
Tutorial for light curtain violations
There is a new option to automatically move the robot away from an obstacle if the light curtain is violated. The SOTO display will indicate which light curtain was triggered and provide instructions to recover the robot.
Magazino Fleet Manager (MFM)
Important: Reactivating all environments
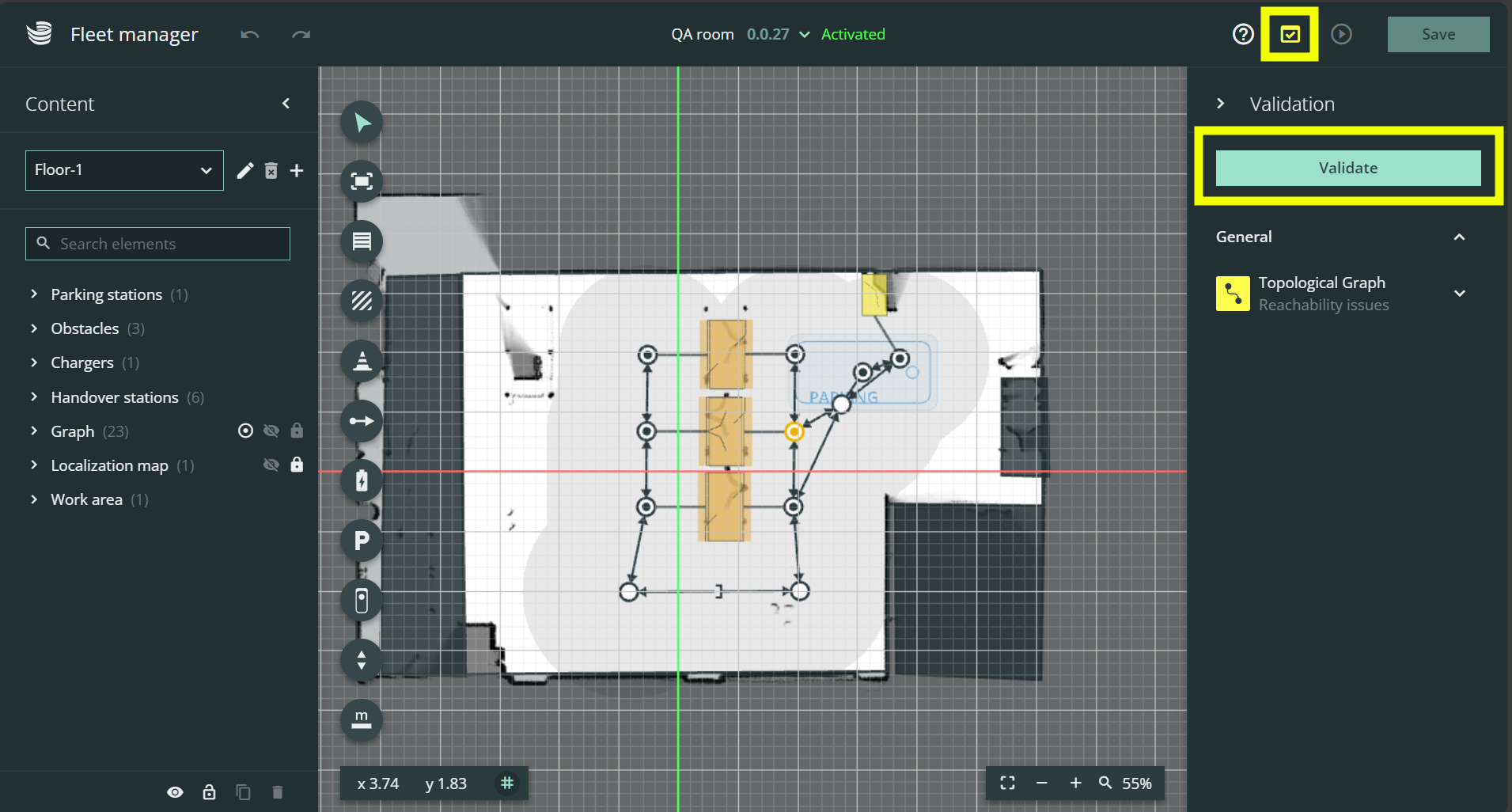
Due to the new validation functionality that checks whether an environment model is suitable for SOTO, all existing environments need to be revalidated and reactivated for SOTO to continue working.
To do this, simply edit the environment and press the checkmark symbol in top right-hand corner and press 'validate'. Once done, reactivate the environment. It is not possible to activate an environment without prior validation.
Note: The validation procedure may take up to one minute.
Canceling orders during pick-up
The cancel order procedure, where a pick is manually aborted in MFM or on the SOTO display, is now available throughout the entire KLT picking process, even if the KLT is already on the gripper.
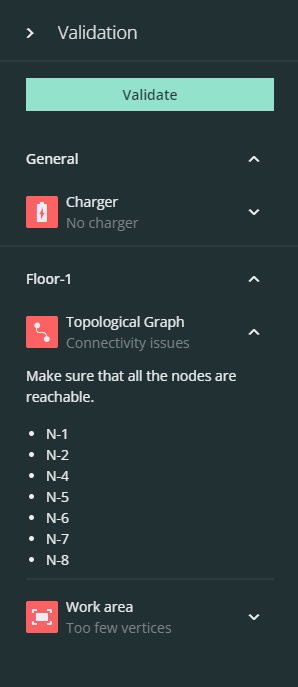
MFM validates the working environment
The Environment Editor now validates the suitability of the working area for the robot, including checks for driving graphs and whether the robot can dock to handover stations and chargers. This ensures the robot can operate effectively in new environments before they are activated.
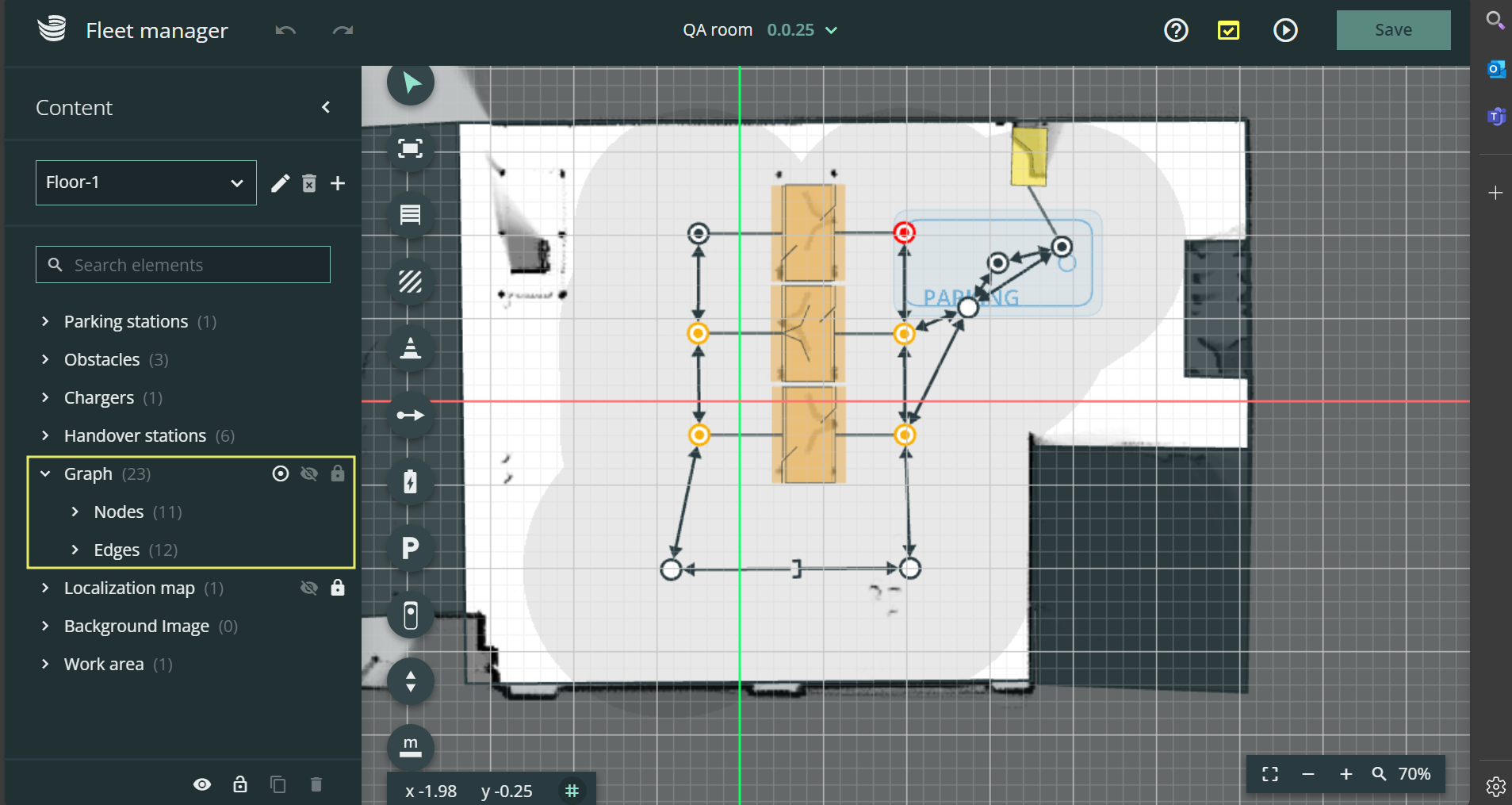
The left-hand panel of the Environment Editor includes an option to divide nodes and edges into groups.
Improved search results
The Order Manager's search functionality has been improved to deliver more accurate and relevant search results, thereby making it easier to find specific orders or KLTs.
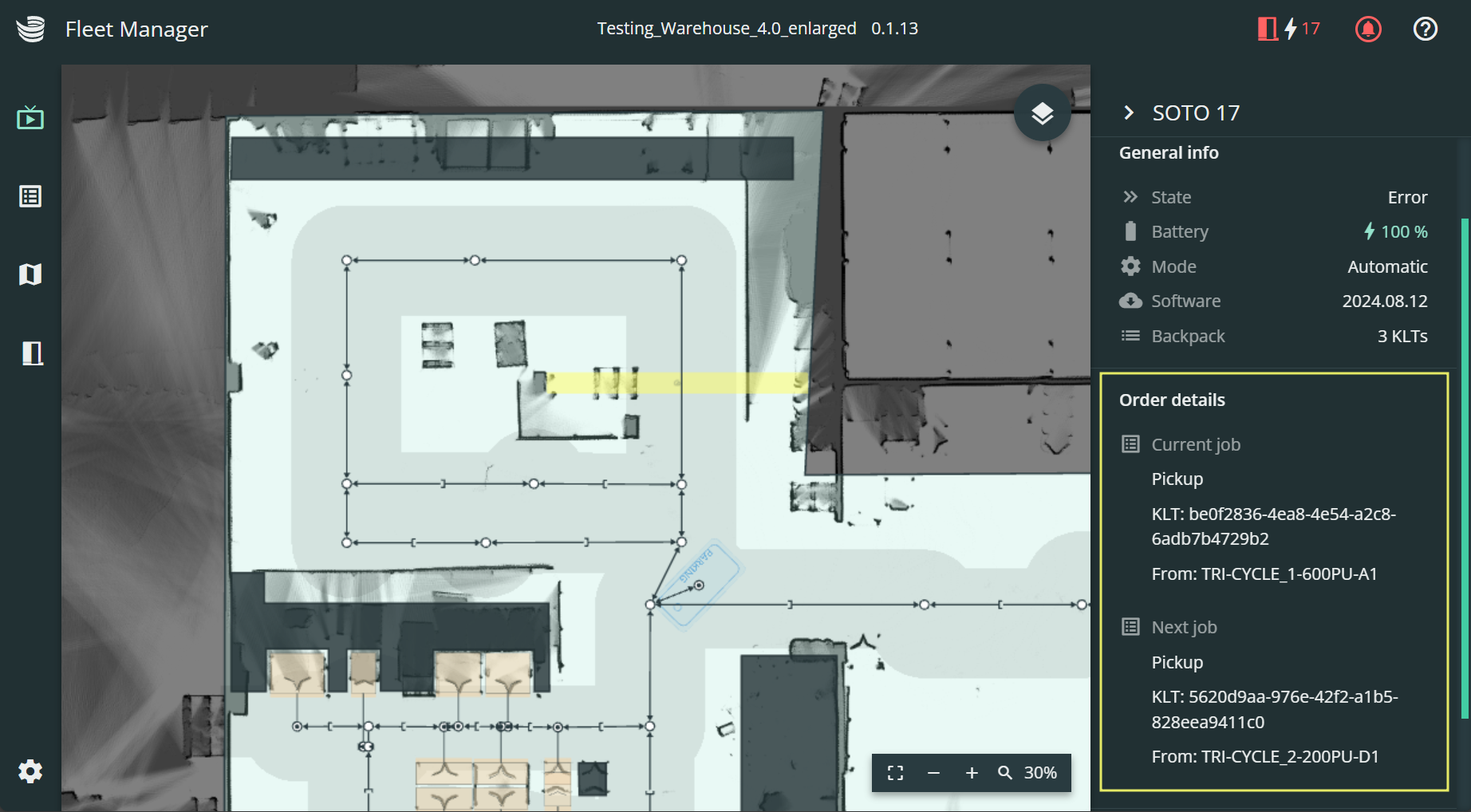
View active and pending jobs
The side panel in the Live View displays active and pending jobs when clicking on individual robots.
New browser restrictions
The Magazino Fleet Manager can now only be used in Google Chrome and Microsoft Edge browsers.
Support for elevators and second floors
The Environment Editor includes an option to connect two floors with an elevator, which SOTO can use if there is enough space.
Note: This feature requires a SYNAOS master controller.
This section provides detailed information about the technical specifications of SOTO. This information is intended for technical experts who need to understand the inner workings of SOTO to deploy, troubleshoot, or improve the performance of SOTO.
New marker types in Foxglove
The perception debug markers in Foxglove are categorized into three distinct marker types for analysis: containers, obstacles, and items.
Container: Represents a virtual object outlining the compartment's boundaries.
Item: Denotes an identified item when a barcode is successfully recognized.
Obstacle: Represents unidentified items where barcode identification was unsuccessful. Additionally, all shelf components are classified as obstacles.
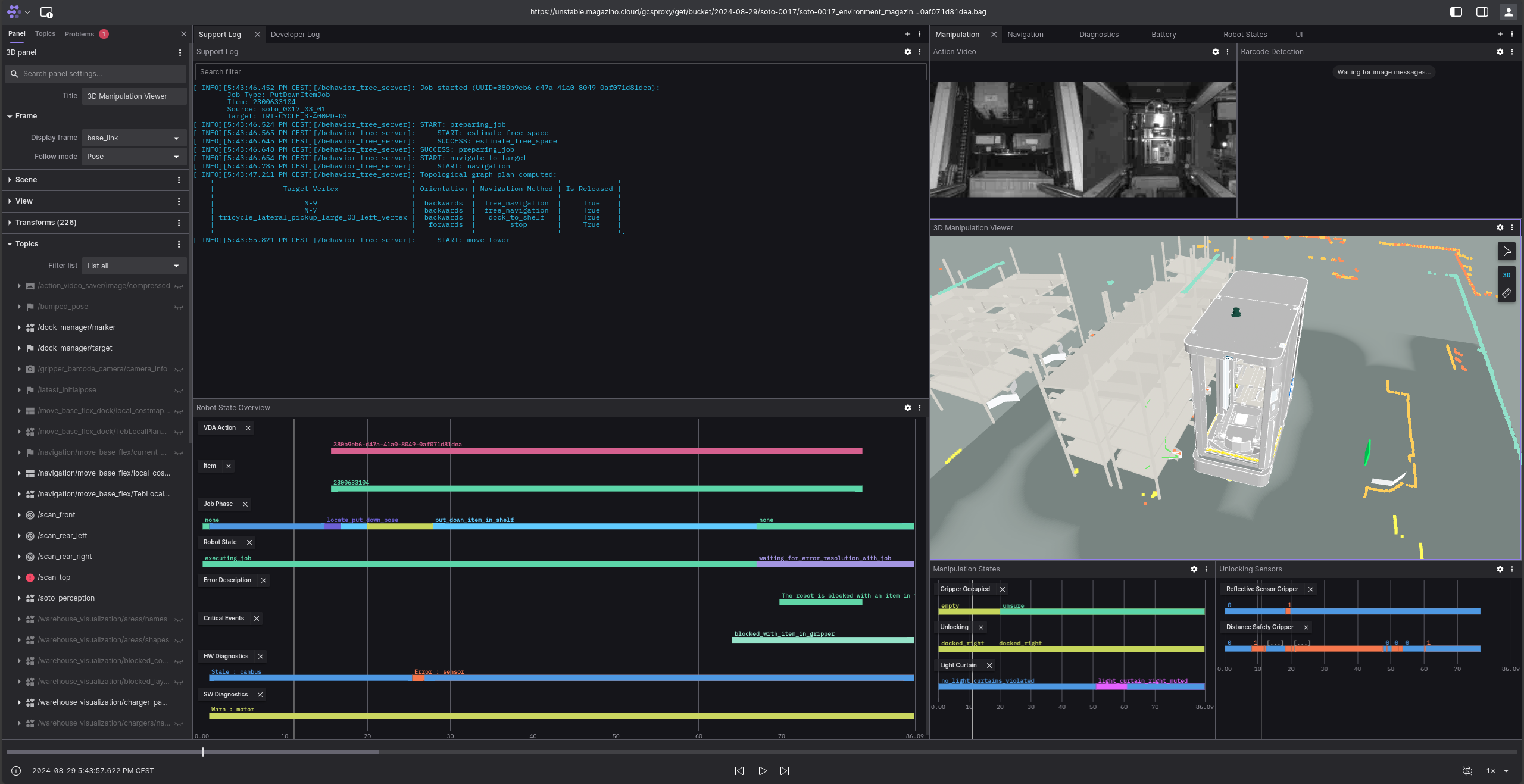
Support logs automatically uploaded to Foxglove
Support logs are now published to Foxglove by default, including manipulation videos while picking, making it easier to identify specific issues during troubleshooting.
Replaying VDA5050 messages in Foxglove
All VDA5050 messages are logged in BigQuery and can be replayed in Foxglove for debugging multi-robot behavior. Statistics include robot snapshots at specific intervals.
Note: This feature is available upon request only.
Simplified maintenance testing with robot skills
Robot functionalities used for service and support tasks can now be managed through a simplified web-based GUI. This is a user-friendly alternative to the current command line tool MagCLI. There are two different GUIs:
GUI for Support: Contains remote monitoring and operation functionalities for providing support. The GUI can be accessed remotely through the following link (need to SSH onto the robot): https://localhost:8001/remote-ops/#/
GUI for Service: Contains maintenance, UVV and service functionalities for service technicians. This needs to be accessed on-site via a LAN cable connected to SOTO. Please note: This GUI is still under development.
These GUIs currently contain limited functionality, which will be added soon. Please use MagCLI for the missing functionalities.
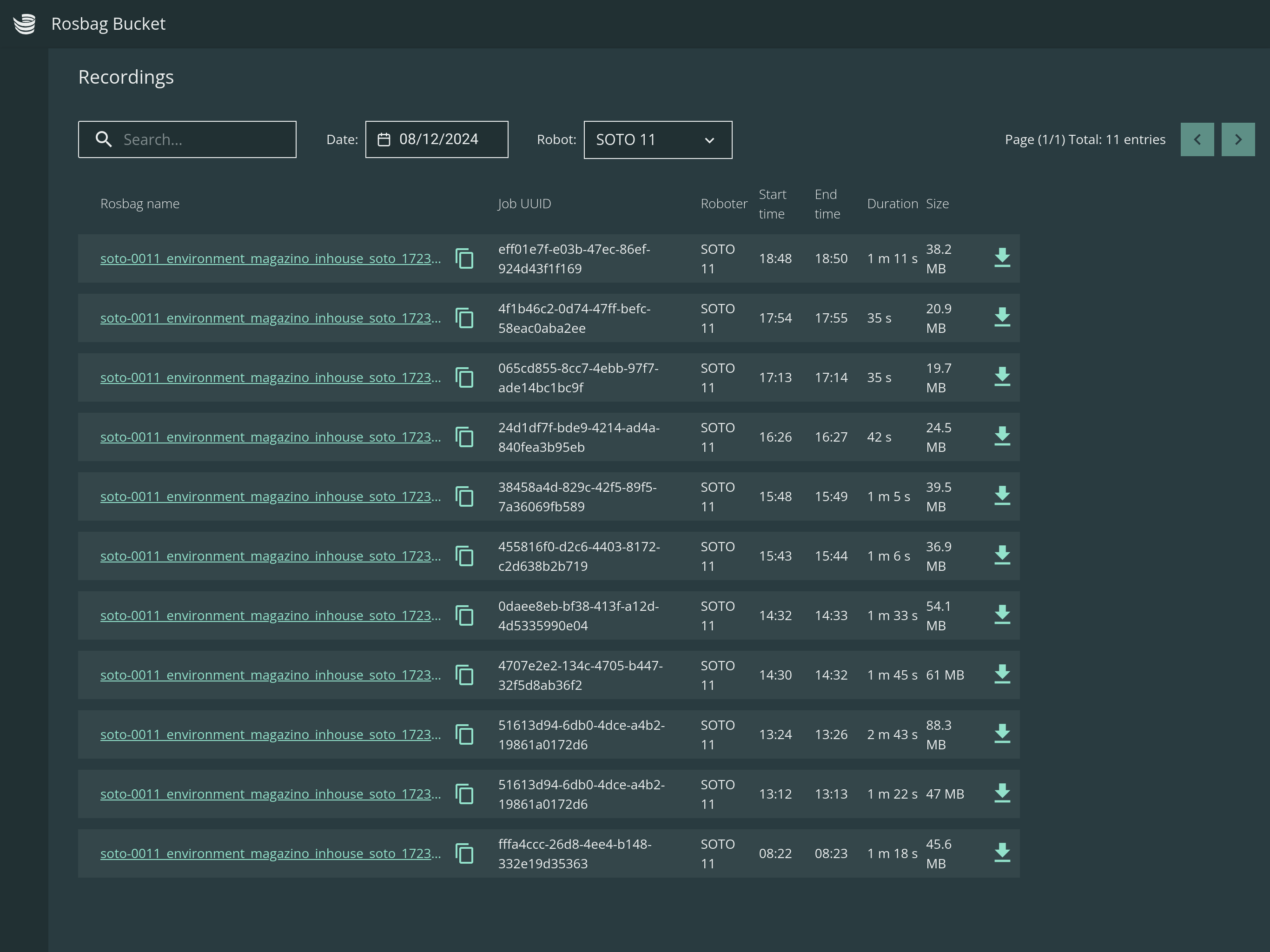
MFM includes a ROSbag debugging tool
MFM now includes a ROSbag debugging tool. When a robot encounters an error, a ROSbag is created and automatically uploaded to he cloud. The MFM lists these ROSbags which can be filtered by date, time, robot, and metadata. You can download the ROSbags or click to open them in Foxglove for replaying the error.
Note: This feature is available upon request only.
Faster error reporting for localization
An error message will now be displayed if SOTO is traveling without any localization match to the map. This allows for faster error identification when SOTO encounters an issue with the localization.
Improved VDA5050 navigation
The navigation capability of SOTO for VDA5050 commands has been improved. This ensures that the robot navigates more reliably, especially in combination with external master controllers.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.

.gif?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26)