This release includes new features and improvements that make SOTO easier to use and more efficient.
SOTO
Improved KLT picking for flow racks
SOTO now picks up KLTs swiftly, without any pauses during the picking process. This ensures that KLTs in the flow rack can slide forward unimpeded after a pick, preventing blockages and ensuring all KLTs remain accessible to the gripper.
Improved KLT collision detection
SOTO now recovers from KLT collisions more effectively, especially when a KLT is misaligned and collides with the funnels. The collision detection is more accurate, resulting in more precise recovery maneuvers and smoother operation.
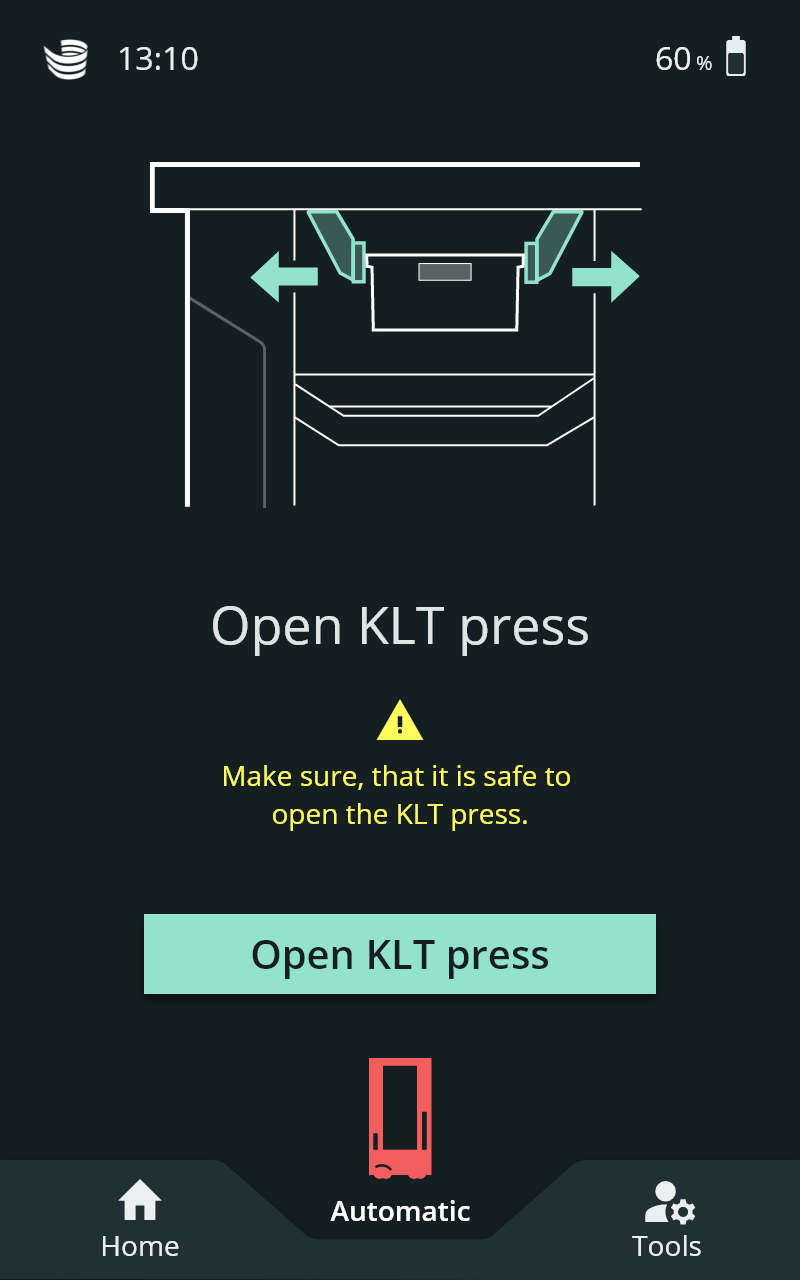
Tutorial for opening the KLT press
The SOTO display now provides a function to open the KLT press in the ‘Tools’ section. The function allows to recover from errors where a KLT that is stuck in the KLT press.
Magazino Fleet Manager (MFM)
Cancel planned orders
You can now cancel orders in the Order Manager that are assigned to a robot but are not yet in progress (so-called horizon orders). Note that it is not possible to cancel orders that are being actively processed by SOTO.
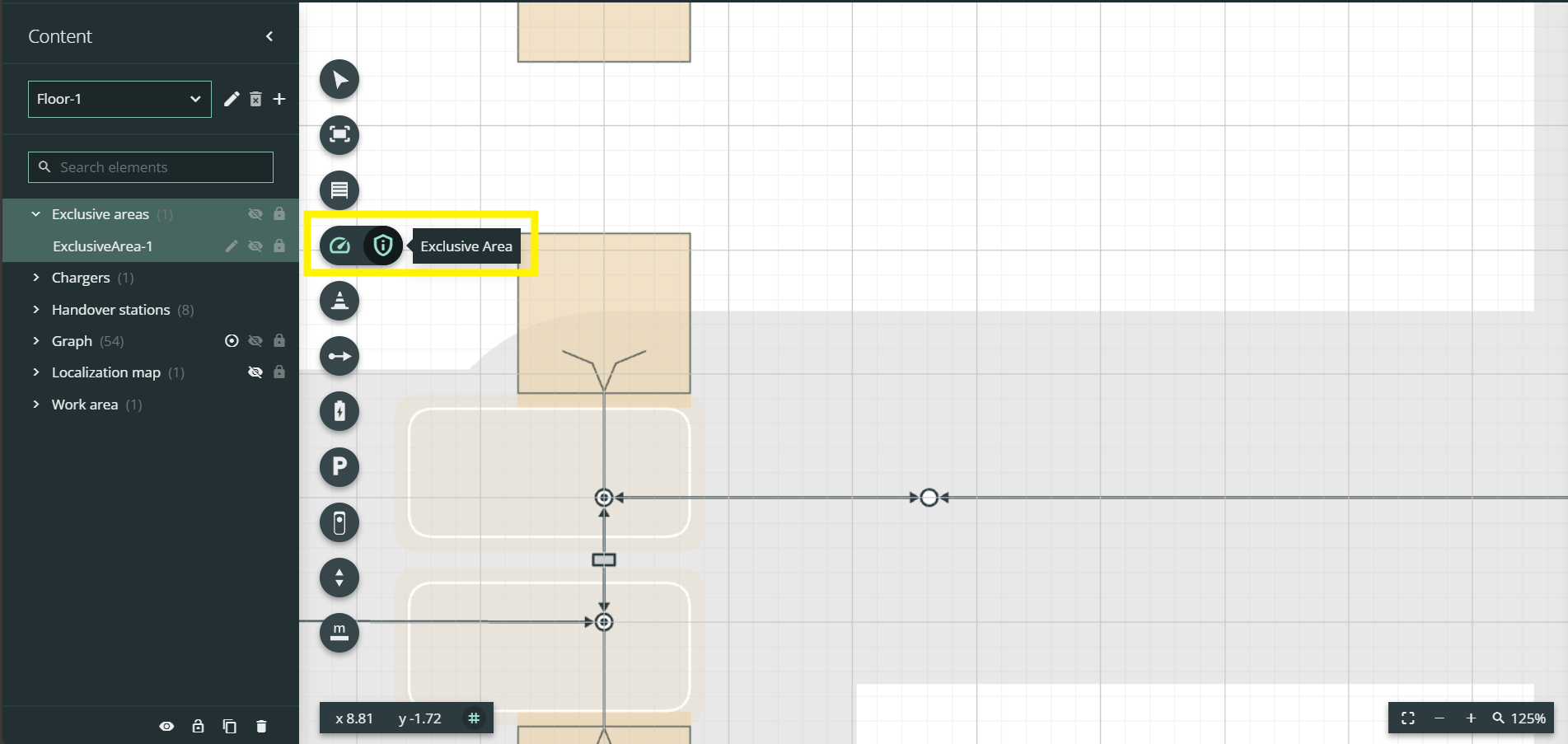
Create exclusive areas for SOTO
You can now define exclusive areas within your environment where only one robot can operate at a time.
How to create an exclusive area:
Go to the Environment Editor.
Click on the speed zone symbol.
Switch to "Exclusive Area".
Draw a polygon to define the boundaries of the exclusive area.
When SOTO approaches an exclusive area, it will pause and request access. Once access is granted, the robot can enter, preventing other AGVs from entering until it leaves. When the robot exits, the access restriction is lifted.
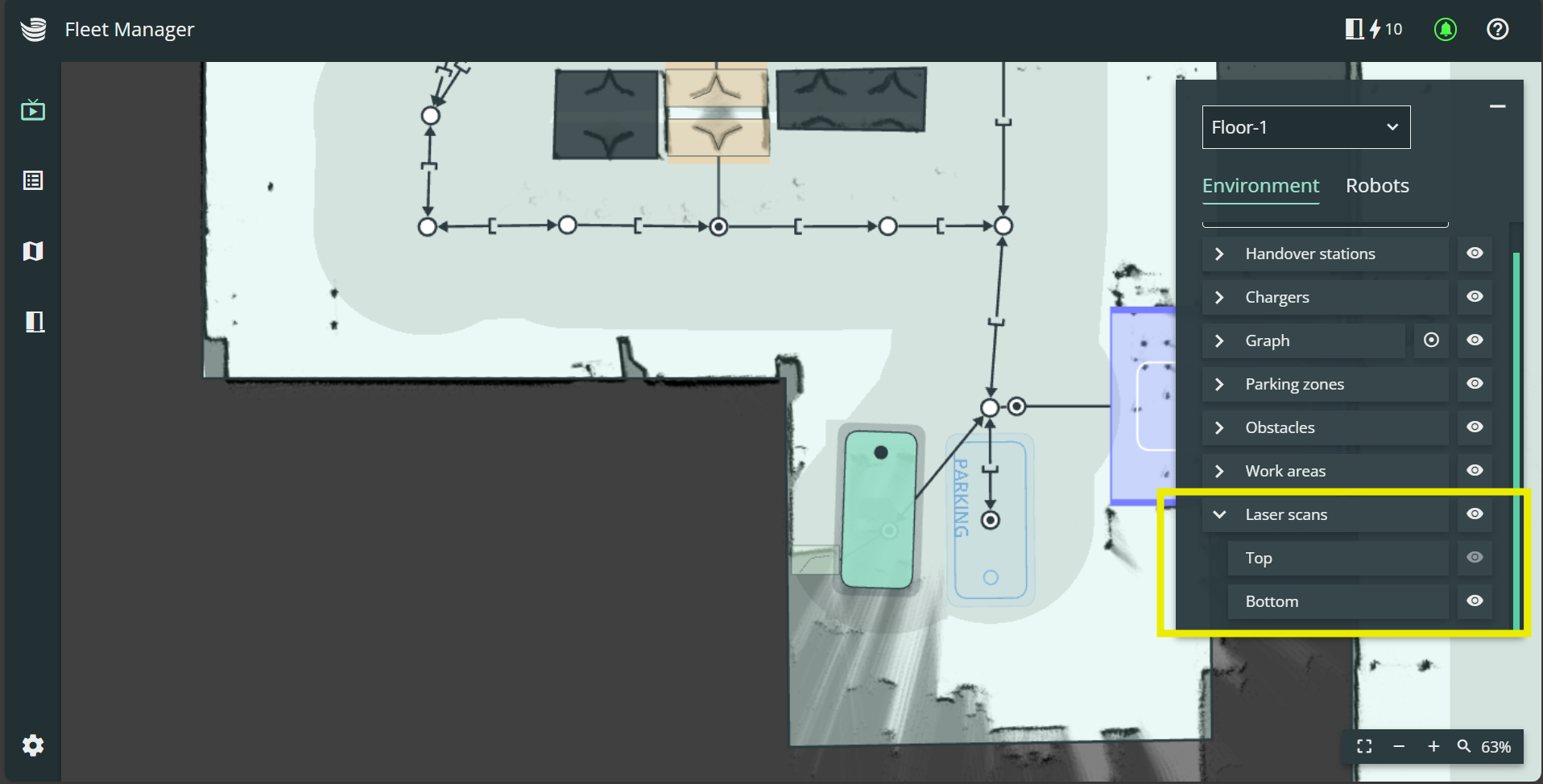
Switch between top and bottom laser scanner maps
To switch between the top and bottom laser scan maps in Live View:
Click 'Environment' in the elements panel.
Use the visibility icons on the right-hand side to select the top or bottom laser scan map.
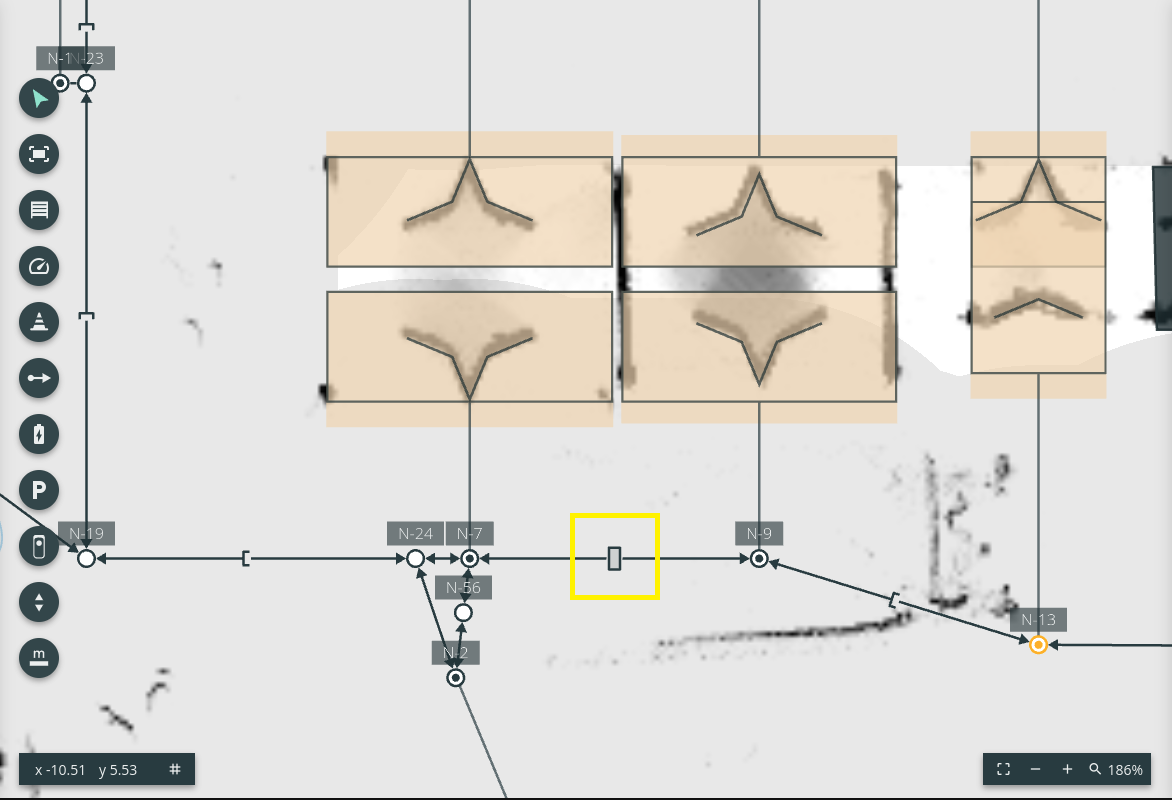
'Switch side' edges marked with a square
When two non-frontal handover stations are connected, the connecting edge will display a square "switch side" symbol. This symbol indicates that the robot will automatically adjust its orientation based on the docking orientation of the handover station where it will perform the next pick.
Important:
This is enabled by default on edges connecting two non-frontal handover stations.
Please ensure the docking orientations of the connected stations are compatible.
If the robot needs to rotate 180° before docking in a narrow aisle, it may not be able to dock to the handover station.
Technical Specifications
This section provides detailed information about the technical specifications of SOTO. This information is intended for technical experts who need to understand the inner workings of SOTO to deploy, troubleshoot, or improve the performance of SOTO.
Robot skills are logged in the database
The robot skills that can be used to perform maintenance tasks are automatically logged in the database. The logs are used to communicate commissioning results to the server, but they can also be used to trace interactions with the robot.
New tutorial for electronic brake tests
There is a new tutorial for executing electronic brake tests that can be accessed via the SOTO UI in the ‘Settings’ section under ‘Robot skills’.
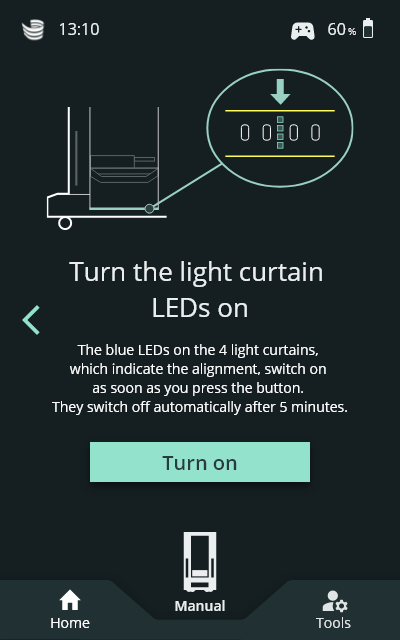
New tutorial for checking alignment of light curtains
There is a new tutorial for checking the alignment of light curtains that can be accessed via the SOTO UI in the ‘Settings’ section under ‘Robot skills’.
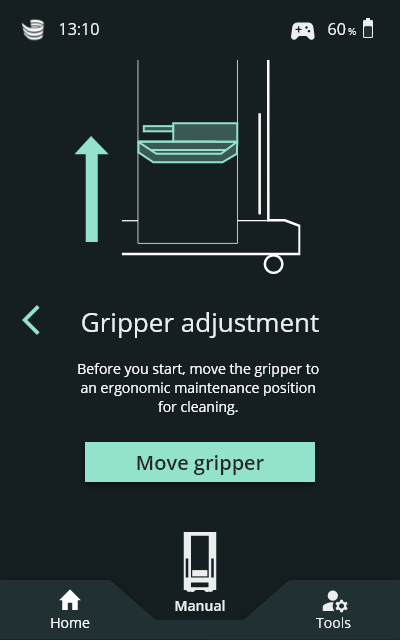
New tutorial for moving the conveyor belts of the gripper
There is a new tutorial for moving the conveor belts when performing cleaning jobs that can be accessed via the SOTO UI in the ‘Settings’ section under ‘Robot skills’.
Robot skills accessible on service GUI
Several new robot skills have been added to the service GUI. To access the GUI, first ssh into the robot and then access the following link: http://localhost:1234/service-tech
New skills include:
Navigate to compartment: Directs the robot to the compartment specified in its current transport order.
Check bumper status: Provides a quick overview of the virtual bumper field.
Battery status and charger details: Displays the current status of the battery and charger.
Navigate to charger: Sends the robot to its charging station.
Brake test: Includes a tutorial for performing a brake test during maintenance procedures.
Claw brake test: Performs a claw brake test during maintenance procedures.
Support for fully constrained VDA5050 orders
SOTO now supports fully constrained VDA5050 navigation. This ensures that SOTO can adhere to driving directions set by the master controller for all edges.
Navigation manager cloud logging
To improve reporting accuracy, SOTO now logs all docking attempts, including reattempts after an initial failure, as a single docking event.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.