This release includes new features and improvements that make SOTO easier to use and more efficient.
SOTO
Continued optimization of VDA5050 updates
VDA communication delays during robot base updates have been further reduced. Building upon previous improvements, this reduction in latency ensures a more consistent driving performance and reduces unnecessary slowdowns.
Improved SOTO bumper recovery
SOTO now performs more accurate recovery maneuvres during bumper field violations. Previously, SOTO would in some cases collide with overhanging shelf parts that were not visible by the sensors. Now, navigation uses shelf data from the fleet manager to avoid these collisions, thereby significantly improving safety.
Note that this improved functionality is limited to shelving systems with a maximum horizontal distance of approx. 10cm between the shelf feet and the overhanging parts.
SOTO drives more precisely
SOTO will now steer more precisely by using a more direct steering feedback channel. This improves navigation and localization performance.
Reduced delays when pressing ‘Abort order’
When 'Abort order' is pressed on the SOTO display, the robot now immediately proceeds with the next action that was planned by the master controller. Previously, the robot would issue a new request to the master controller, causing potential delays. This reduces disruption from errors and ensures the robot continues working efficiently.
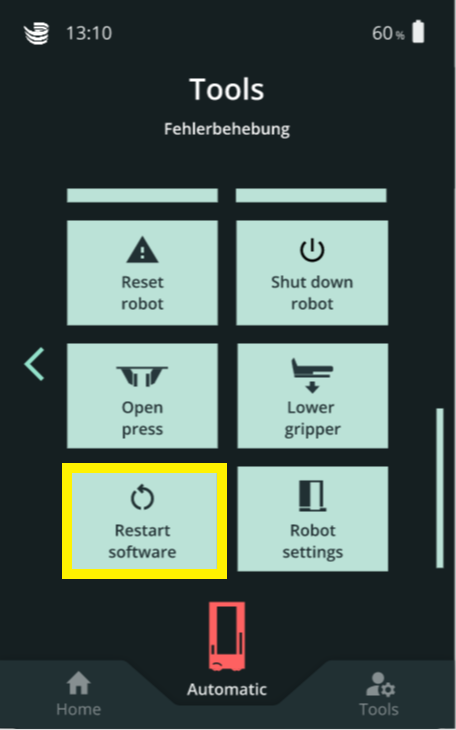
New function to restart robot software
The SOTO display now provides a function to restart the robot software. This is may be required during maintenance procedures and can be accessed by pressing Tools and ‘Restart software’.
SOTO rotates gripper to better identify barcodes
To improve barcode detection in bright environments, SOTO now slightly moves its gripper left and right during repositioning if an initial scan fails. This negates reflective light that may interfere with the camera system and improves overall stability.
SOTO picks KLTs when adapter depth is unclear
SOTO now automatically repositions when it encounters difficulty determining the adapter's depth. Note that in some cases, such as when QR codes are incorrectly sized, this may result in more frequent repositioning maneuvers.
Improved stability of gripper
SOTO's shelf unlocking mechanism has been improved to work reliably with shelves that have varying compartment heights across different layers. This ensures consistent KLT picking and enhances overall operational stability.
SOTO repositions KLTs more efficiently
SOTO now only uses the KLT-press to reposition KLTs on the gripper when they are misaligned relative to the backpack compartment. Previously, SOTO would in some cases unnecessarily use the KLT-press to reposition correctly aligned KLTs. This update prevents unnecessary use of the KLT-press, improving operational efficiency.
SOTO picks 300x200 KLTs more reliably
SOTO now has improved stability when picking up 300x200mm KLTs from the 300mm side, due to a slight reduction in manipulation speed. This prevents KLTs from falling over and allows the manipulation process to be stopped before such an event occurs.
Note: Pick-up of 300x200mm KLTs from 300mm wide shelf compartments with KLT rotation is only supported in special cases. Such pick-up compartments need to be carefully designed and approved by Magazino. A slope of 10 degrees is required and it needs to be ensured that KLTs do not overshoot the shelf adapter.
SOTO detects stuck KLTs more reliably
SOTO now picks KLTs from the backpack more reliably, due to an improvement to the detection of jammed KLTs in the backpack compartment. Previously, the system incorrectly detected that the KLT was stuck in the backpack, even when the KLT had reached the end stops. This improves operational stability and ensures the robot does not generate uneccessary errors.
Magazino Fleet Manager (MFM)
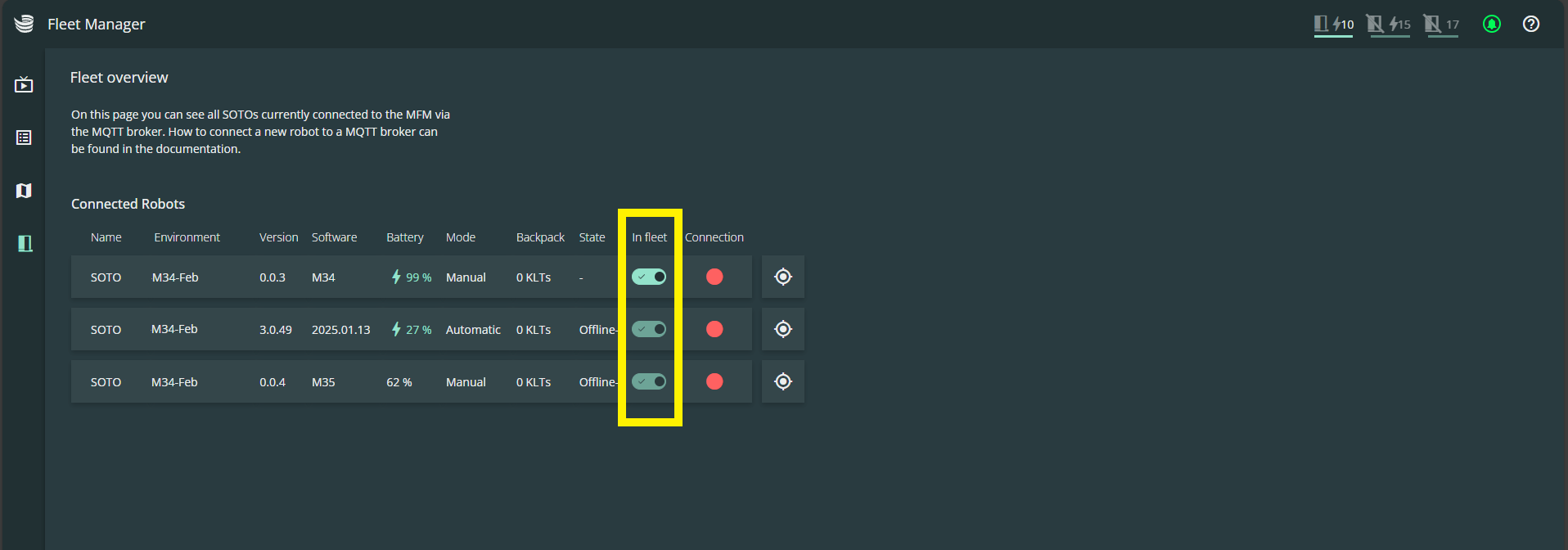
Temporarily remove robots from the fleet
In the Fleet Overview, robots can be temporarily removed from the fleet using the 'In fleet' button. The master controller will subsequently ignore the robot and free up blocked navigation nodes to other robots. This is particularly useful for inspections or scheduled maintenance, since deactivating a robot will only send the robot to a charger and block the charger node.
Robots that are removed from the fleet will appear in transparent gray with a crossed-out number in the Live View.
Note that you can not remove robots from the fleet in the following situations:
If the robot is deactivated
If the robot is currently completing a tour or has KLTs in its backpack
If the robot is driving to the charger
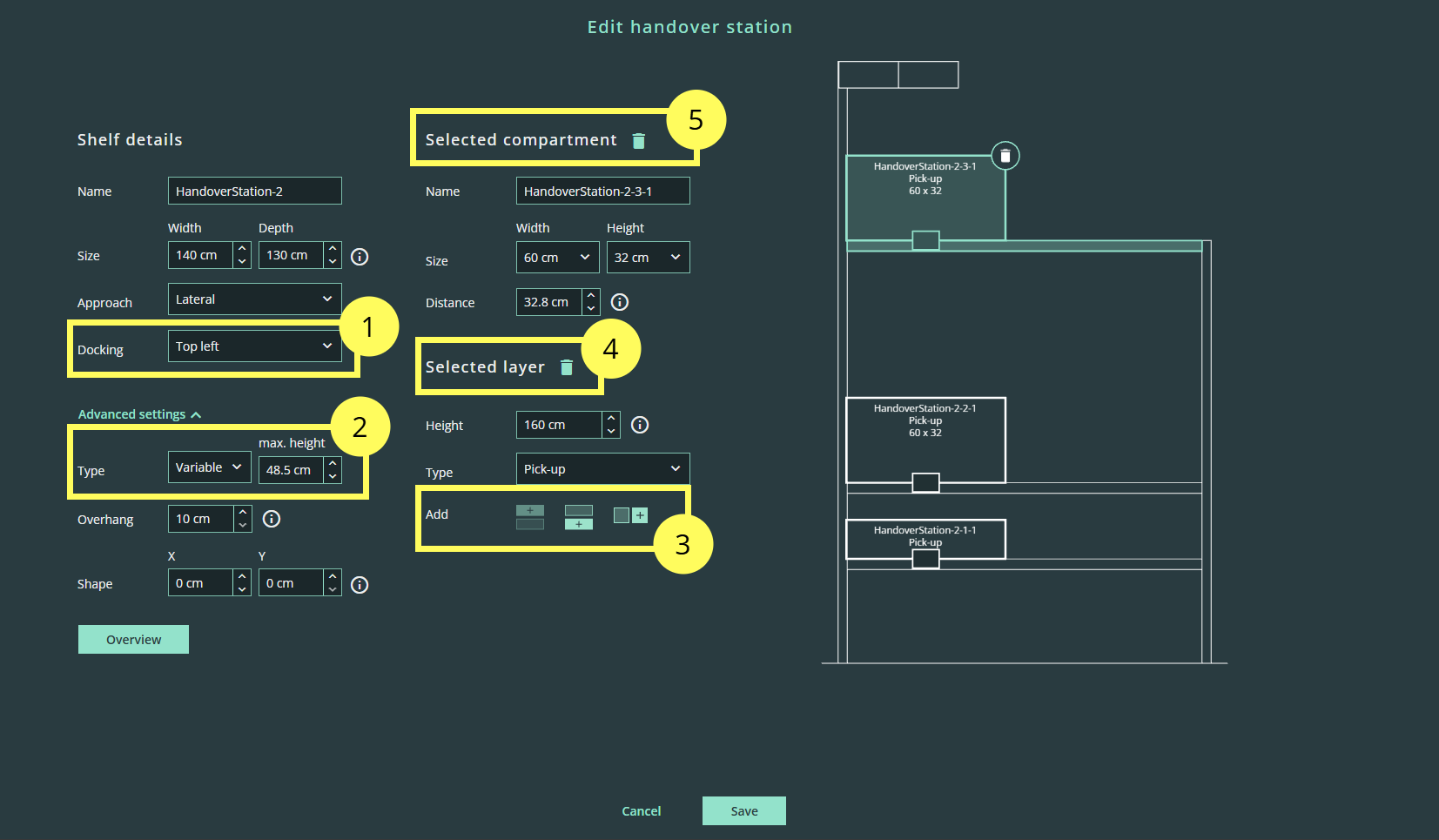
New menu for modeling handover stations
There is a new menu for modeling handover stations, offering better usability and finer control. The menu includes the following:
Docking configuration:
Select bottom, top-left, or top-right docking via a dropdown menu.
Define the upper limit for height variations on handover stations with adjustable heights in the Advanced settings.
Layer and compartment modeling:
Add layers and compartments using the buttons in the 'Selected layers' section (the buttons next to the shelf have been removed).
Delete layers by clicking the bin icon next to ‘Selected layer’.
Delete compartments by clicking the bin icon next to ‘Selected compartments’.
Select and edit multiple compartments by pressing ‘Ctrl’ and clicking on each compartment.
Dimensions can now only be input to one decimal place.
There are a range of useful tooltips to help with the modeling process.
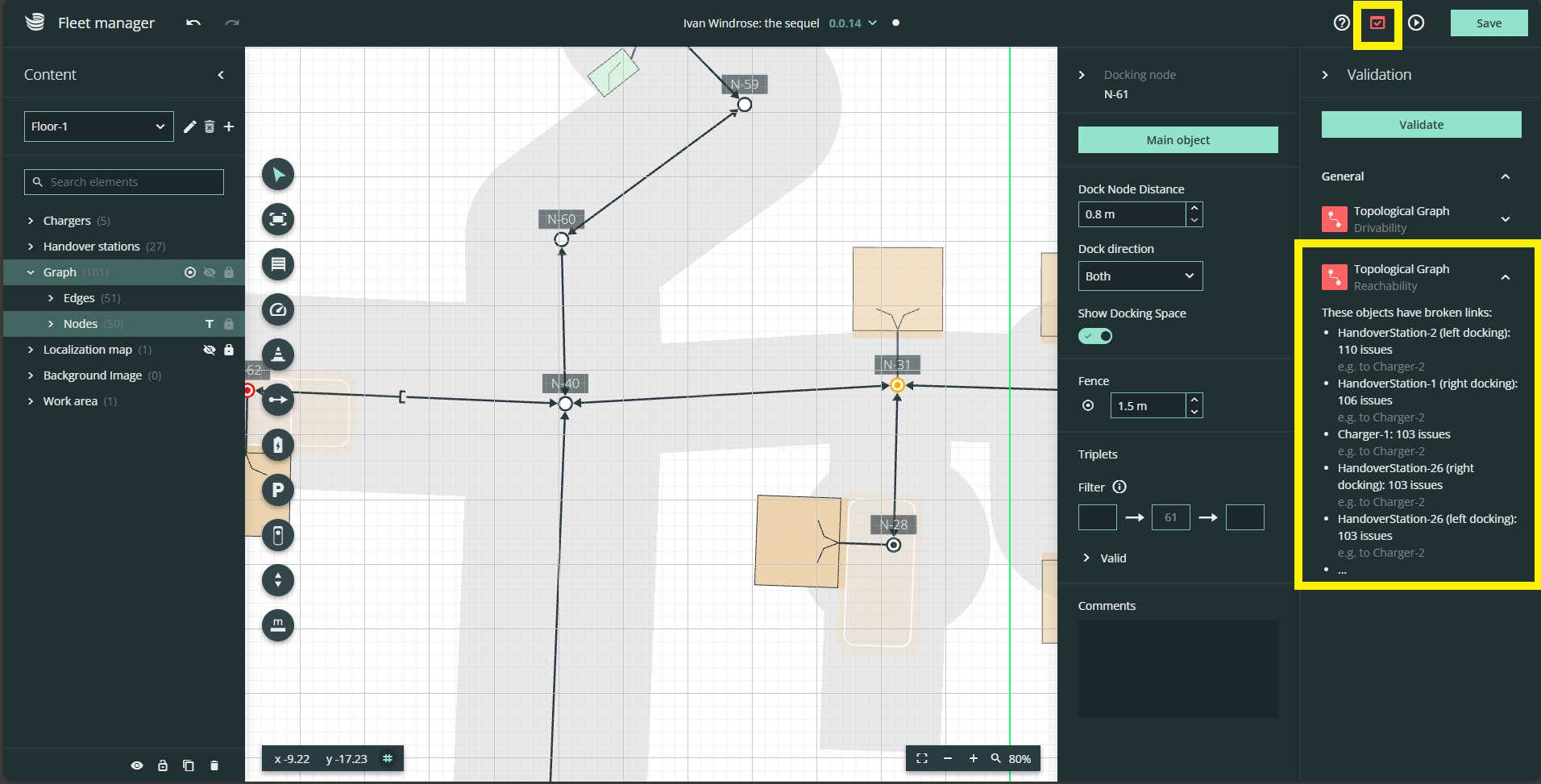
Validate the reachability of docking nodes
The Environment Editor now includes a new validation function to check the 'reachability' of docking nodes (e.g., handover stations, chargers, and elevators). This function validates the entire driving path (the chain of navigation nodes) between two docking nodes, flagging any segments that would prevent SOTO from successfully navigating to the target.
For instance, it identifies node chains where orientation constraints prevent travel between handover stations because the robot does not have enough space to switch its orientation.
To access this feature, press Validate in the top right corner and select a node from the Reachability dropdown. For further instructions, see section “Validation”.
Please note that we are continuing to enhance this feature.
Create obstacles with exact angles
Holding the Shift key while drawing obstacles in the Environment Editor now snaps polygons to 90°, simplifying the creation of rectangular structures during both creation and modification.
Technical Specifications
This section provides detailed information about the technical specifications of SOTO. This information is intended for technical experts who need to understand the inner workings of SOTO to deploy, troubleshoot, or improve the performance of SOTO.
Switch to mapping mode while errors are active
It is now possible to switch SOTO into mapping mode while there is an open error. This allows users to acknowledge the error report and attempt to resolve them via the teach-in mode.
New robot skills for maintenance
There are several new robot skills accessible in the Magazino Maintenance Center for service technicians. The interface helps technicians carry out maintenance, UVV, calibrations and service cases. To access the GUI, first ssh into to the robot and then access the following link: http://localhost:1234/service-tech
New skills include:
Blue spotlight control: Turns the blue spotlight on and off
Firmware version: Displays the firmware version
Magcli provides more exact values for logs
In magcli, the command log record data now provides a more exact timeframe. The command can be used to gather a log that can be sent to Magazino for further analysis.
Home wheels during errors
Previously, it was not possible to home the wheels while an error was active. Now, during an error, users can switch to manual mode, drive the robot to a charger, and home the wheels, regardless of whether an error occurred.
VDA interface supports reorder backpack
The VDA interface now supports the explicit REORDER_BACKPACK action, replacing the previous reliance on pick commands. See Actions for Item Handling for details.
SOTO keeps orderId
SOTO now keeps the orderId after pressing ‘resetRobot’ on the SOTO UI or via an instantAction, such as ‘resetAGV’.
Change in Fire Alarm API
It is now possible to adapt the MQTT of the fire alarm system. The API was adapted to reflect this change, and the payload was simplified to a boolean. For details, see API Specification and browsable documentation.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.