This release includes new features and improvements that make SOTO easier to use and more efficient.
SOTO
Detection of rotating KLTs
During KLT pick-up, SOTO now detects if a KLT is rotating. This can occur if a KLT becomes stuck in the shelf while being pulled in by the gripper. If detected, SOTO will immediately stop pulling in the KLT and display an error turotial. This enhances safety and prevents KLTs from unexpectedly falling.
Flat put-down of KLTs with unknown height
When the height of a KLT is unknown, SOTO raises the backpack to a flat position. This avoids potential collisions with the backpack shelf and improves the stability of put-down procedures.
KLT press no longer used twice to correct offets
Previously, SOTO would in some cases use the KLT press twice to correct offets on the gripper. Now, by placing the KLT in the middle of the gripper, unnecessary use of the KLT press is avoided. This improves operational efficiency.
Improved safety during KLT pick-up
The perception algorithm of SOTO has been improved to more accurately track the position of KLTs during pick-up procedures. This improves the overall safety and resolves previous issues where KLTs could become stuck between the shelf and the gripper, potentially leading to falls. If an unsafe condition is detected, SOTO now halts the procedure automatically.
More reliable identification of KLTs stuck in shelves
SOTO is now better able to detect when KLTs are genuinely stuck in shelves. Previously, SOTO would occasionally misidentify KLTs as being stuck during pick-up procedures. This increases stability and reduces unneccessary errors during operation.
SOTO no longer moves upon safety trigger while waiting
When SOTO is stationary and awaiting instructions from the master controller, it will no longer perform a recovery maneuver if its safety field is violated. Previously, the robot would attempt to move away from obstacles, which could cause delays when the robot received a new transport order. This update improves navigation and localization performance.
SOTO needs to be relocalized after mapping
SOTO now needs to be manually relocalized when switching from mapping to automatic mode. This is achieved by driving the robot to the charger, as per the tutorial shown on the display. This resolves previous localization errors that occured after mapping new environments.
SOTO boots up faster
SOTO now boots up in 12 seconds, rather than 30.
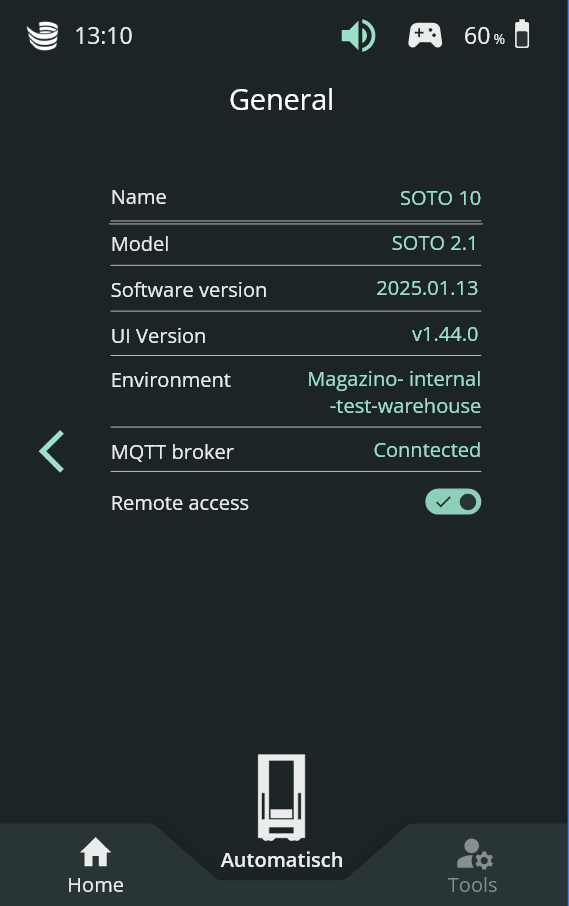
New function to enable and disable remote access
The SOTO display now provides a function to enable or disable remote access to the robot. This can be done by pressing Tools > Settings > General. Then toggle the Remote access button.
Improved error tutorials
Error tutorials are now more responsive to actions taken by the user. When multiple errors occur, the display will sequentially guide users through the resolution steps. Previously, the display occasionally failed to switch between tutorials when multiple errors were present.
Magazino Fleet Manager (MFM)
MFM accessible via mobile phone
The Magazino Fleet Manager (MFM) is now accessible via a mobile browser, allowing you to view the Live View, Fleet Overview, settings, and notifications directly on your mobile phone.
In the upcoming release, you will also be able to receive notifications directly on the lock screen of your mobile phone.
Receive error notifications via email or Microsoft Teams chat
You can now receive error notifications via email or Microsoft Teams chat. Please raise a support ticket to have this feature enabled.
Note: At present, this feature can only be activated and edited by the Support team.
Technical Specifications
This section provides detailed information about the technical specifications of SOTO. This information is intended for technical experts who need to understand the inner workings of SOTO to deploy, troubleshoot, or improve the performance of SOTO.
SOTO UI messages uploaded in bag files
Blackbox files (bag files) that are uploaded to the cloud now contain screenshots of messages shown on the SOTO UI. These can be viewed in Foxglove while debgugging service cases.
Reduced black box file upload
Black box files (bag files) that are uploaded to the cloud now only contain the following folders per default:
/var/tmp/bags/
/var/tmp/manipulation_videos/
/var/tmp/manipulation_logs/
/var/tmp/box_detection/
/var/tmp/box_tracking/
/var/tmp/pallet_perception/
/var/tmp/fork_check_bags/
/var/tmp/hlls/candumps/
/var/tmp/hlls/bags/
/var/tmp/base_truck/
/var/tmp/system_usage_watchdog/
This reduces the amount of storage required for resolving typical error cases.
Backpack tilting disabled during navigation
Backpack tilting during navigation is now disabled. It can be reenabled via the parameter enable_backpack_tilting_during_navigation
New skill for calibrating the press jaw and gripper camera
The Magazino Maintenance Center now includes a skill for calibrating the press jaw camera and gripper camera. This is only included in the service technician version, where a direct LAN cable connection to the robot is required.
Note: In order to calibrate the gripper camera, the calibration pattern needs to be mounted into the third layer of the backpack. More details available here.
Robot Joints Calibration
The Magazino Maintenance Center now includes a skill for calibrating the motor joints on the robot. This is only included in the service technician version, where a direct LAN cable connection to the robot is required.
The following joints can now be calibrated:
gripper_base_x
gripper_y_left
gripper_y_right
gripper_rotate
backpack_tilt
vertical_axis
klt_press
Operating hours of SOTO
The Magazino Maintenance Center now includes a skill for checking the operating hours of the robot. This can be viewed on both the remote support as well as the service technician version of the Magazino Maintenance Center.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.