
Drift
Automatisk modus
SOTO 2.1 er en autonom robot som hovedsakelig opererer i automatisk modus. Roboten mottar sine oppdrag uavhengig via det allerede eksisterende systemet og behandler dem. Det er kun i tilfelle feil at det er nødvendig med inngrep av opplært personell eller en spesialist.
Lyssignaler i automatisk modus
Hvitt lys som pulserer | Hvitt lys blinker | En side hvit og den andre rød. | Rødt lys blinker |
|---|---|---|---|
 |  |  |  |
SOTO er i beredskap og venter på oppdrag. | Veien er blokkert. | SOTO indikerer kjøreretningen med det hvite lyset. | SOTO har en feil. |
En side er hvit og den andre blinker gult | Gult lys blinker | Grønt lys som pulserer | Grønt lys konstant |
|---|---|---|---|
 | |  | |
SOTO indikerer en sving. | SOTO samhandler med en overleveringsstasjon. Lysgardinen som vender mot overleveringsstasjonen, er avslått. | SOTO lader. | SOTO er fulladet |
Akustiske signaler i automatisk modus
Summer: Summeren gir et signal hvis det oppstår et brudd på det minste beskyttelsesfeltet på den virtuelle støtfangeren eller hvis en lysgardin brytes, uten at nødstopp-knappen er trykket inn.
Høyttaler: Roboten har en høyttaler som for øyeblikket ikke er i bruk.
Manuell betjening
Roboten kan styres manuelt på to måter. Roboten kan beveges ved hjelp av en kontroller. Når du bruker en kontroller, forblir sikkerhetskontrollen alltid aktivert.
Hvis roboten er deaktivert, kan det monteres jekkehjul som gjør det mulig å skyve roboten.
Drift med en kontroller
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Fare! Fare for ulykke! SOTO kan kjøres utenfor arbeidsområdet i manuell modus. Som operatør er du ansvarlig for sikkerheten under hele den tiden SOTO brukes med kontrolleren. |
|---|
 | Merk! Fare for skade! Roboten kan kjøres mot hindringer som ikke oppdages av laserskannerne i manuell modus. Ikke kjør mot hindringer. Sørg alltid for at det er tilstrekkelig avstand oppover slik at den øverste laserskanneren ikke blir skadet. |
|---|
Manuell betjening av roboten med kontrolleren
SOTO kan kjøres manuelt ved å sette roboten i manuell modus.
Monteringsposisjon for kontrolleren
SOTO kan betjenes med en håndholdt kontroller. Kontrolleren er lagret i en brakett på baksiden av drivbasen.
Slik bruker du kontrolleren
Styr og flytt SOTO med kontrolleren
| 1 | Endre driftsmodus for SOTO til manuell:
| 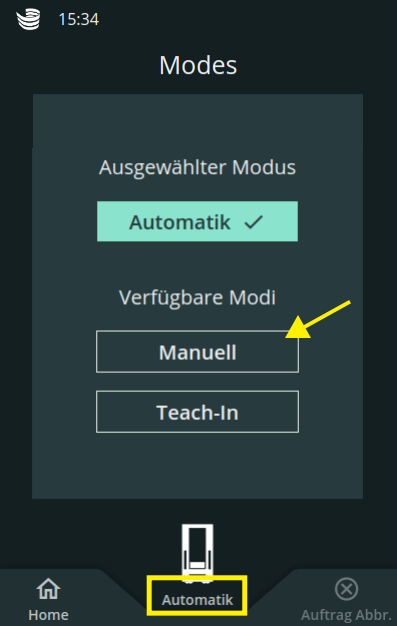 |
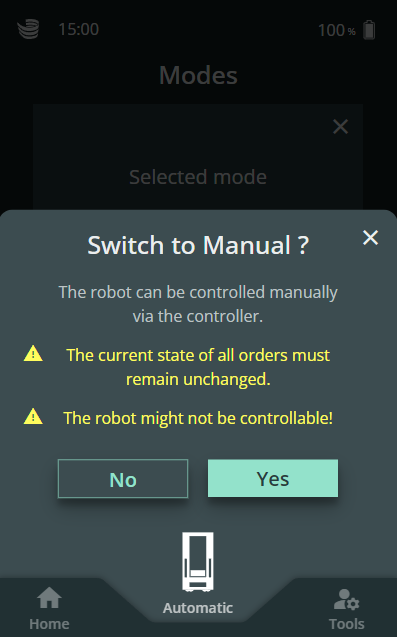
| 2 | Velg "Yes" for å bytte til Manuell. ⚠️Hvis det fortsatt er aktive oppdrag i ryggsekkhyllen, må du ikke endre status og posisjon for lastbærerne. | 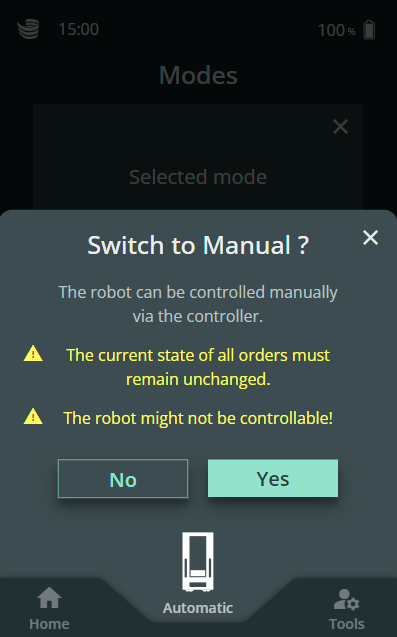 |
| 3 | Ta kontrolleren ut av holderen. Merk! Kontrolleren er plassert under ryggsekkhyllen. For å unngå at lysgardinen utløses, må du fjerne kontrolleren fra utsiden av ryggsekkhyllen. |  |
| 4 | Tilkoblingen kan nå startes ved hjelp av "Start"-knappen2️⃣på kontrolleren. | 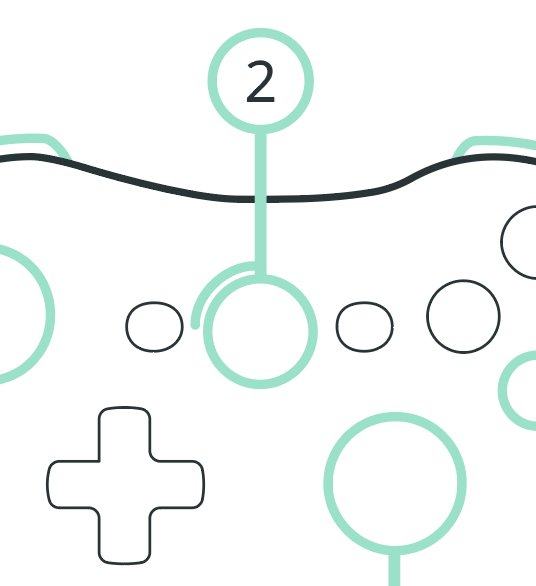 |
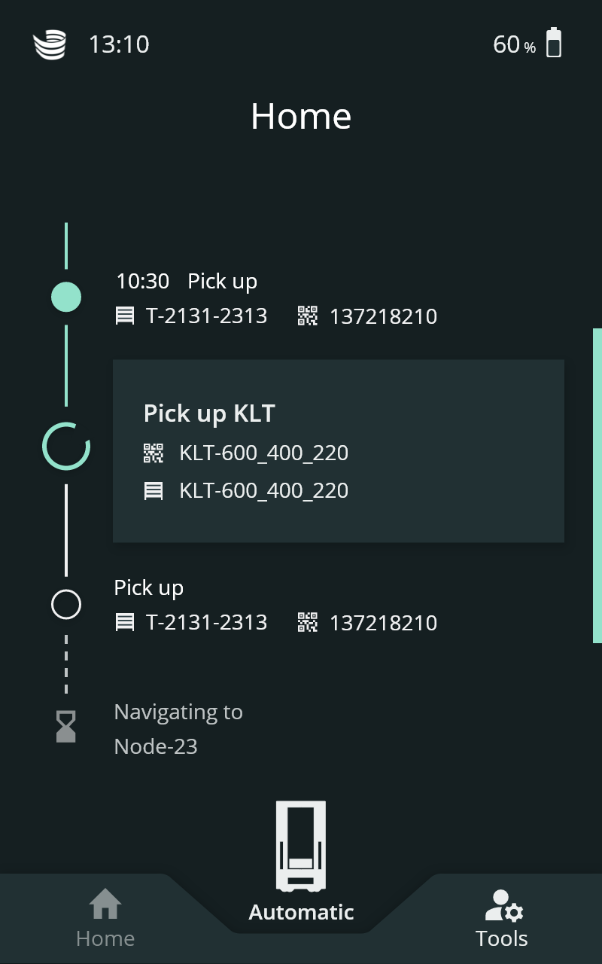
| 5 | Hvis tilkoblingen var vellykket, vises et kontrollersymbol i toppteksten på SOTO-displayet.
| .png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) |
| 6 | Når du har manøvrert roboten til ønsket sted, kobler du fra kontrolleren og setter den tilbake i holderen. Når du returnerer kontrolleren, må du forsikre deg om at den klikker godt fast i braketten igjen. For å gjenoppta normal drift, setter du SOTO tilbake i automatisk modus. | 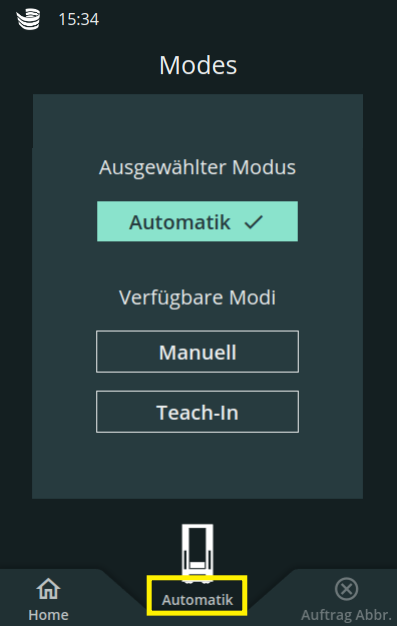 |
Ikke glem å slå SOTO tilbake til automatisk modus.
Slik bruker du kontrolleren - Knapper og Konfigurasjoner
Roboten kan nå styres med den håndholdte kontrolleren. Naviger roboten til den tiltenkte målposisjonen.
Robotens standardhastighet er satt til 0,3 m/s.
Ikke alle knappene på kontrolleren er tilordnet.
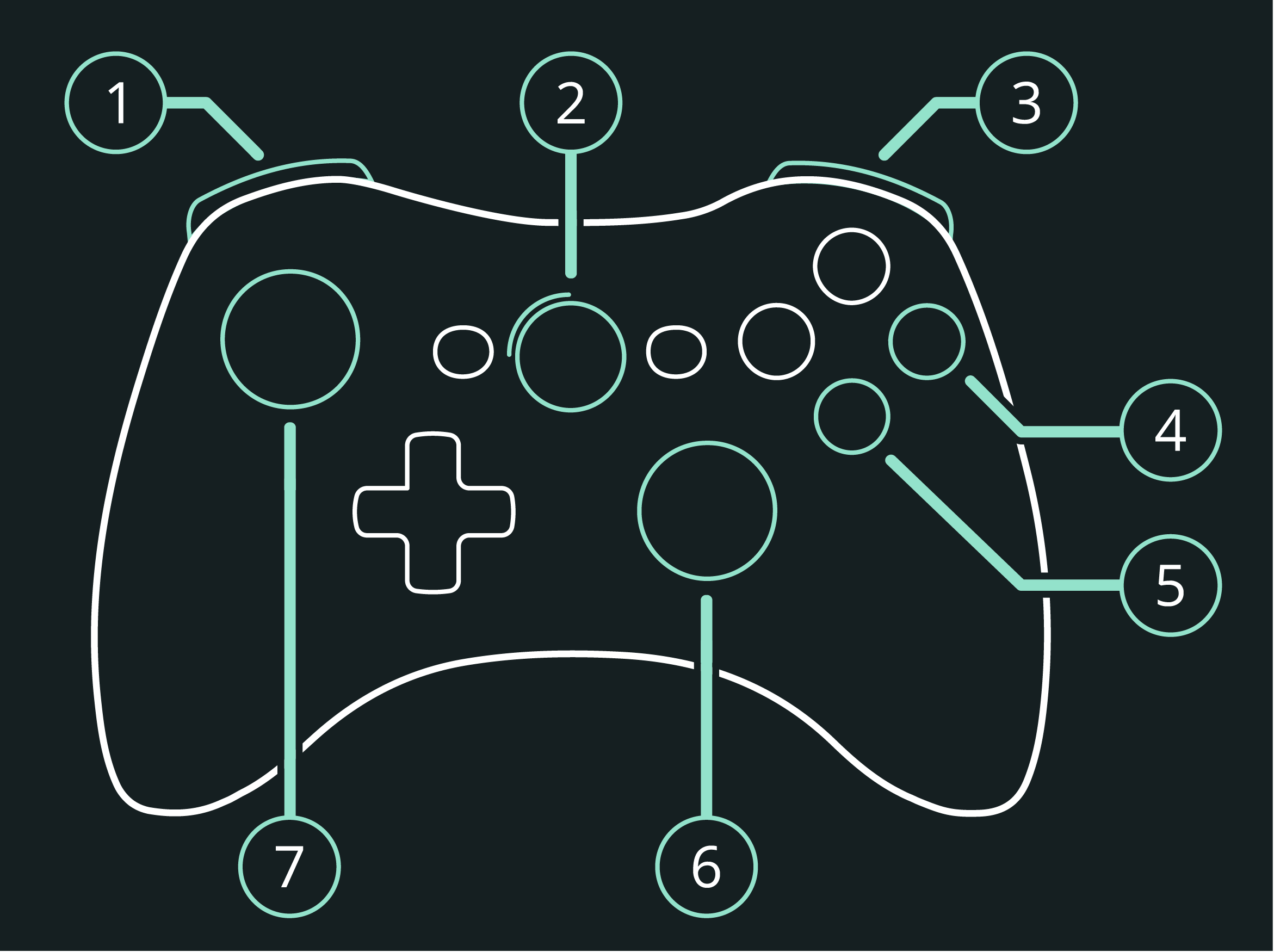
Knapp | Funksjon |
|---|---|
| Redusert hastighet: Roboten reduserer hastigheten til 0,05 m/s
|
| ⚠️Das Licht zeigt die erfolgreiche Verbindung an. Trykk én gang for å starte kontrolleren. |
| Maksimum hastighet: Roboten akselererer til 1,5 m/s
|
| Styring av ryggsekkhyllen: Vipper ryggsekkhyllen fremover. |
| Styring av ryggsekkhyllen: Vipper ryggsekkhyllen bakover. |
| Rotasjonskontroll: Endrer robotens orientering ved å rotere rundt sentrum |
| Translasjonskontroll: Flytter roboten i X- og Y-retning uten å endre orienteringen |
Bruk alltid redusert hastighet når du beveger roboten i nærheten av hindringer som ikke registreres av laserskannerne - spesielt laderen.
Sikkerhetssensorene forblir aktive i manuell modus. Roboten reduserer automatisk hastigheten hvis sikkerhetsfeltene brytes av hindringer i nærheten. Husk at laserskannerne i bunnen bare registrerer hindringer i 0,12 m høyde.
Tips for en bedre opplevelse
Prøv å koble USB-dongelen til en ledig port → hvis porten er inne i metallhuset, kan det påvirke signalstyrken.
Forsøk å holde avstanden kort og ublokkert under robotkontrollen.
Kontroller at batteriet på kontrolleren ikke er i ferd med å tømmes. Lav spenning på batteriene øker etterslepet betydelig.
Feilsøke
Hvis du er i Manual-modus, og roboten nekter å kjøre, går du tilbake til Automatic-modus. Bekreft feilen (hvis det er noen), la motorene utføre referansekjøring. Skift deretter tilbake til Manuell-modus for å kjøre roboten. Vennligst sjekk avsnittet ovenfor for å få en komfortabel kjøreopplevelse.
Hvis du oppdager noe under arbeidet som ikke er beskrevet i disse instruksjonene, ber vi deg kontakte MAGAZINO på http://support.magazino.eu.
Bruk av berøringsskjermen
Displayet har flere funksjoner.
Informasjon om SOTO og dens oppdrag kan hentes i automatisk modus.

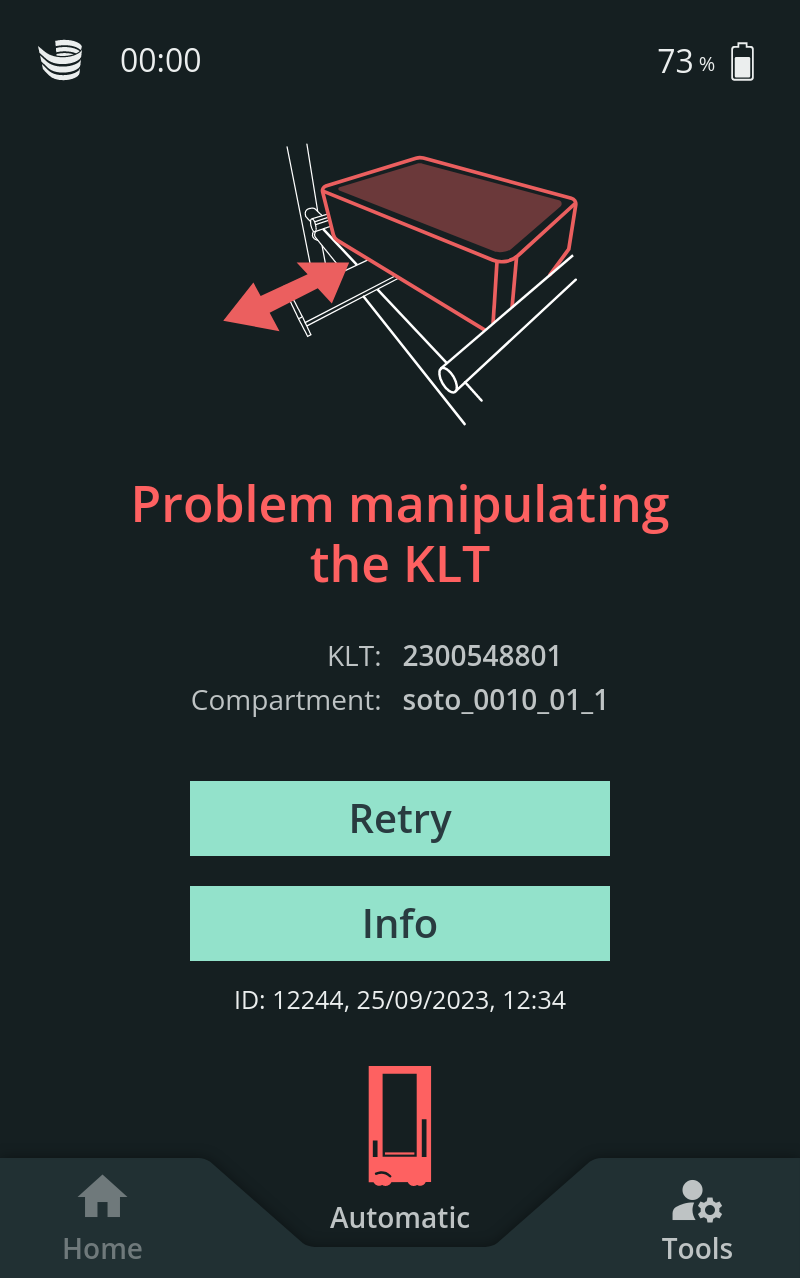
Hvis det skjer et inngrep, viser displayet instruksjoner om hvordan feilen kan rettes.
Displayet kan også brukes til å sette roboten i manuell modus og fra manuell modus tilbake til automatisk modus.
Du finner mer informasjon om SOTO-displayet i dokumentasjonen for SOTO-displayets grensesnitt.
Bruk nødstopp-knappen
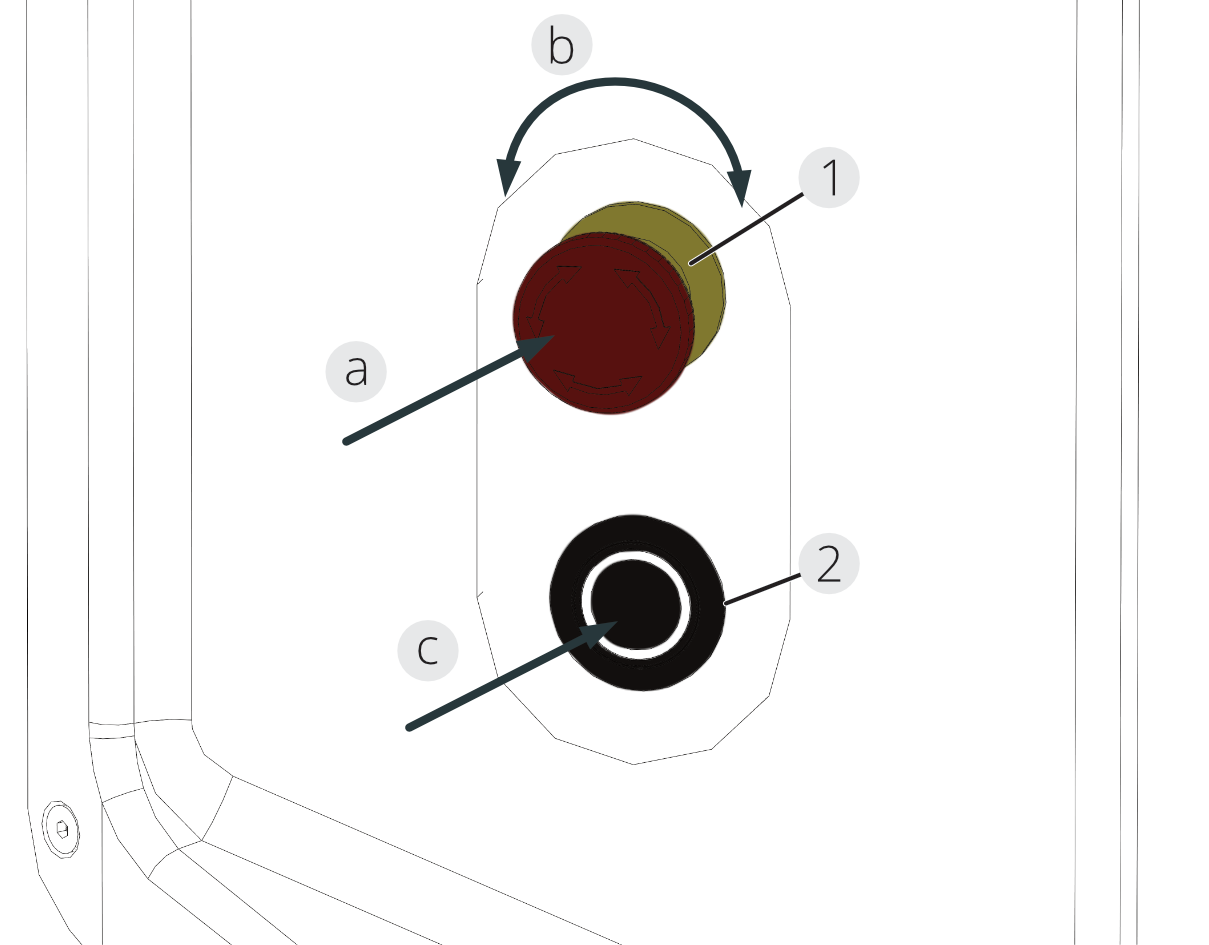
1) Nødstopp-knapp, 2) Trykk-knapp
Nødstopp-knappene brukes for å forhindre ulykker og skader på roboten. Ved å trykke på en nødstopp-knapp stoppes alle robotens bevegelser umiddelbart.
Trykk (a) på nødstopp-knappen (1). Roboten stopper alle farlige bevegelser. Opplås nødstopp-knappen for å kunne sette roboten i drift igjen. Vri (b) nødstopp-knappen i en hvilken som helst retning til knappen er opplåst. Trykk (c) på trykk-knappen (2) for å sette roboten i drift igjen.
Drift med jekkehjul
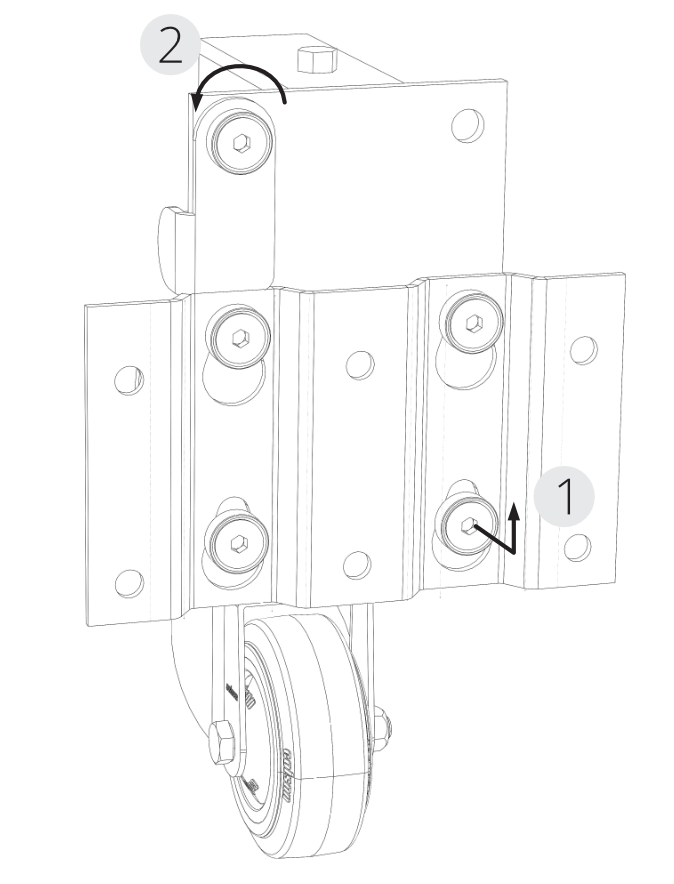
1) Veiledning, 2) beskyttelse
Jekkehjulene er hektet inn i et hurtigfeste (1) og holdes på plass av sikringen (2). Når roboten er hevet ved hjelp av jekkehjulene, holdes jekkehjulet sikkert på plass av robotens vekt.
Etter at alle de fire jekkehjulene er montert, kan roboten jekkes opp og skyves ved å trykke på pedalen.
| Merk! Monterte jekkehjul skader robotens beskyttelsesfelt. Demonter alle jekkehjulene før oppstart av roboten. |
|---|
| Merk! Roboten kan bli skadet hvis den senkes raskt ned fra jekkehjulene. Senk alltid roboten forsiktig og kontrollert. |
|---|