
TORU 5.5 Ingebruikname
Technische gegevens

Aanduiding | Aanduiding | ||
|---|---|---|---|
Draagvermogen | 30 kg | Nominale capaciteit | 100 Ah |
Gewicht | 230 kg | Aandrijfvermogen | 2 × 534 W |
Type accu | LiFePo4 | max. gewicht per object | 3 kg |
Gewicht accu | 8 × 2,8 kg | Interface | 2.4 en 5 GHz |
Accuspanning | 24 V |
Richtinggevoelige informatie
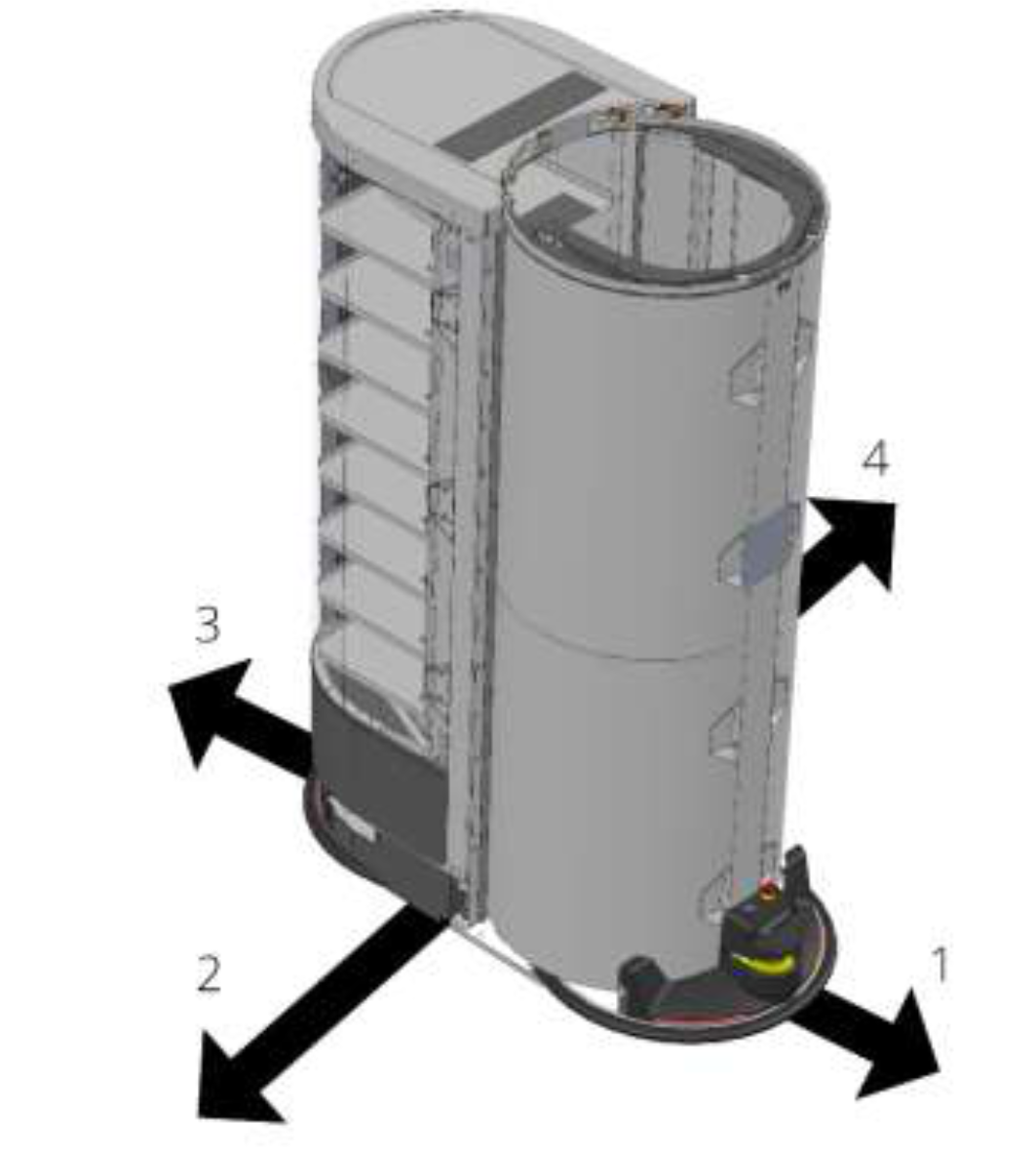
1) voor, 2) rechts, 3) achter, 4) links
De richtingsinformatie heeft betrekking op de hoofdrijrichting.
De robot kan zowel vooruit als achteruit rijden. De huidige rijrichting van de robot wordt aangegeven door de led-balken aan de voor- en achterkant. De led-balk in de rijrichting licht wit op, de led-balk tegen de rijrichting in licht rood op.
De uitgeschakelde robot controleren
Alleen onderhoudspersoneel
Nadat de robot is uitgeladen en uitgepakt, wordt aanbevolen de robot te controleren op schade en volledigheid.
Vereisten:
De robot is volledig uitgepakt.
Transportvergrendelingen zijn verwijderd.
De robot is uitgeschakeld.
Te controleren punten:
Strakke passing van de behuizingsonderdelen.
Stevige bevestiging van de noodstopknoppen.
Stevige bevestiging van de sleutelschakelaar.
Of de onderdelen van de behuizing onbeschadigd zijn.
Of de optische kappen van de laserscanners onbeschadigd zijn.
Of de vensters en sensoren onbeschadigd zijn.
Soepele werking van de kolomrotatie.
Soepelheid bij het duwen van de robot.
Vergrendeling van de rugopslag.
Als alle items zijn gecontroleerd en in orde zijn, kan de robot worden ingeschakeld en kan de controle worden voortgezet van de functionaliteit van de ingeschakelde robot.
De ingeschakelde robot controleren
Alleen onderhoudspersoneel
Vereisten:
Er zijn in uitgeschakelde toestand geen defecten aan de robot vastgesteld.
De toren is gedraaid in de richting van de rugopslag.
Uitvoering:
Schakel de robot in met de sleutelschakelaar.
Controleer de laadstatus van de accu's. Laad de robot indien nodig op.
Verplaats de robot naar het basisstation.
Rijd een kleine afstand met de robot en controleer of de handmatige signalen correct worden uitgevoerd.
Kalibreer de camera's.
Als alle stappen zonder herkenbare fouten zijn uitgevoerd, kan de robot in gebruik worden genomen.