
TORU 5.5 Onderdelen
Algemeen overzicht
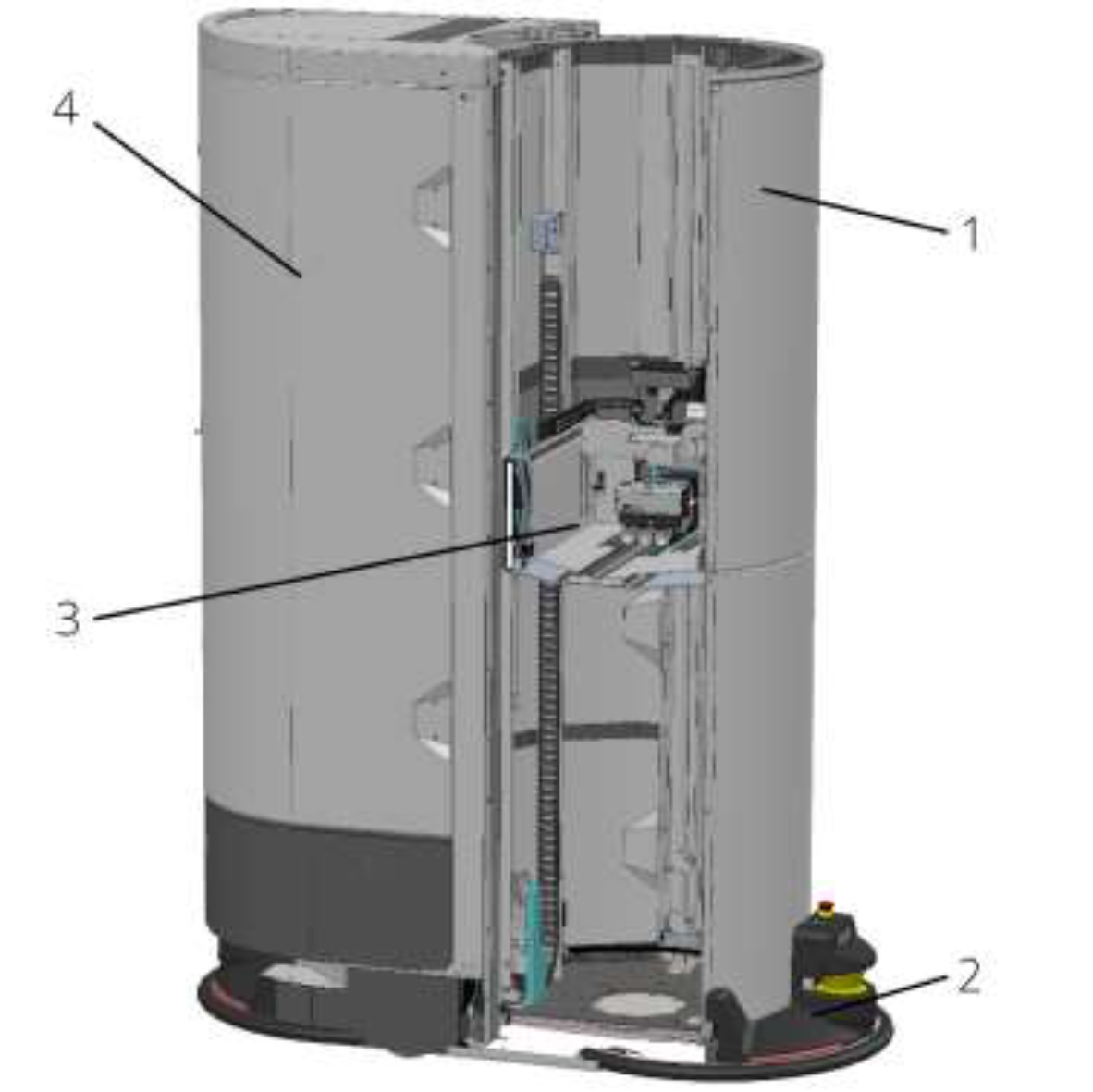
1) Toren, 2) Aandrijfbasis, 3) Schoenendoosgrijper, 4) Rugopslag
TORU 5.5 bestaat in wezen uit vier onderdelen. De schoenendoosgrijper (3) wordt gebruikt om de te verzamelen objecten te hanteren. De toren (1) beschermt mensen tegen gevaarlijke machinebewegingen. De aandrijfbasis (2) maakt contact met de vloer. De rugopslag (4) dient als opslag voor de te verzamelen voorwerpen.
Schoenendoosgrijper
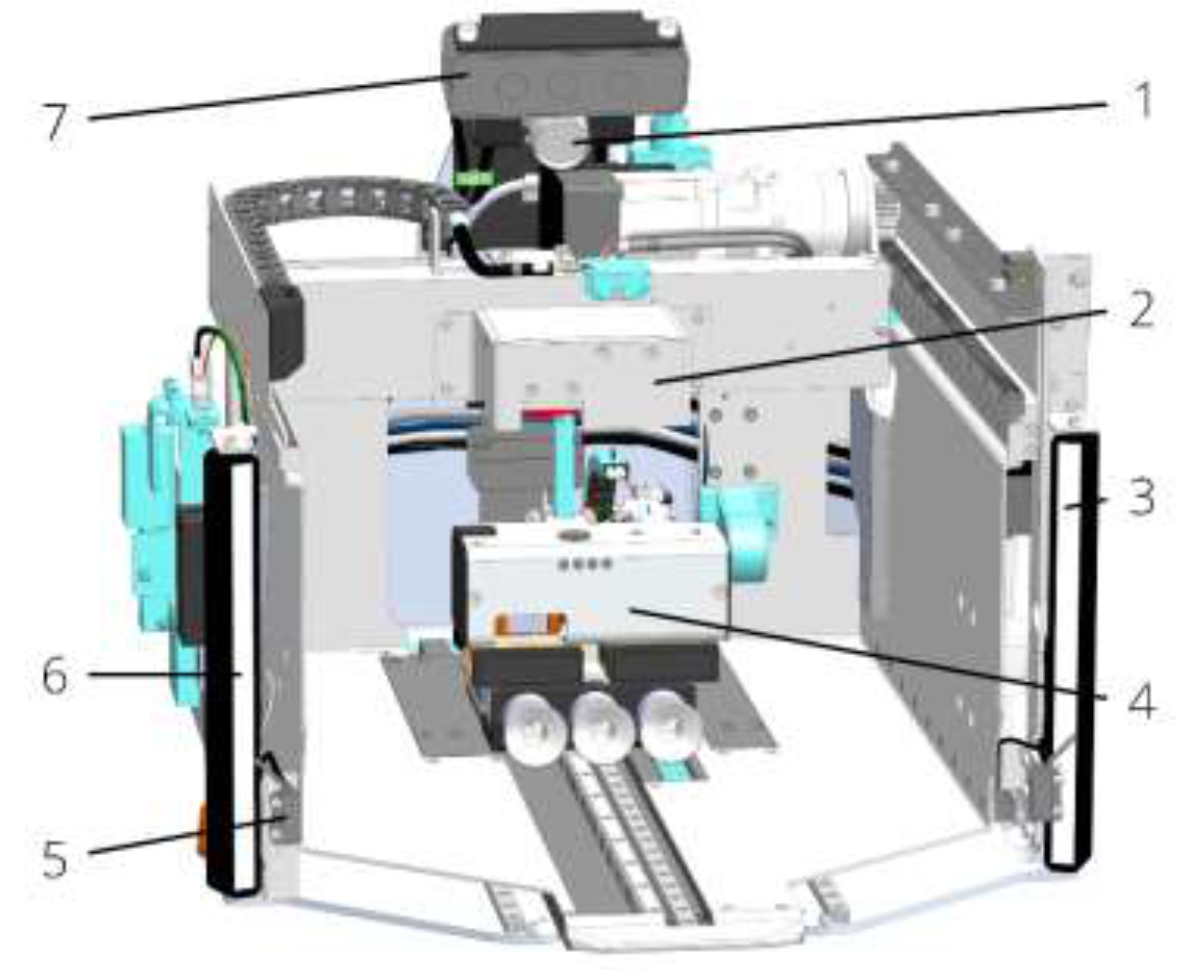
1) Barcodecamera, 2) Terugduwunit, 3) Led links, 4) Aanzuigunit, 5) Lichtbarrière, 6) Led rechts, 7) 3D-camera
De schoenendoosgrijper heeft interactie met de objecten die moeten worden verzameld. Met de 3D-camera kan de grijper de positie, grootte en oriëntatie van de objecten in het orderverzamelrek herkennen. De barcodecamera wordt gebruikt om barcodes op de schoenendoos te herkennen. Dankzij de pushback-unit kunnen de schoenendozen terug in het orderverzamelrek worden geduwd boven de laagste doos wanneer een stapel dozen is gepakt.
Afdekking voorzijde
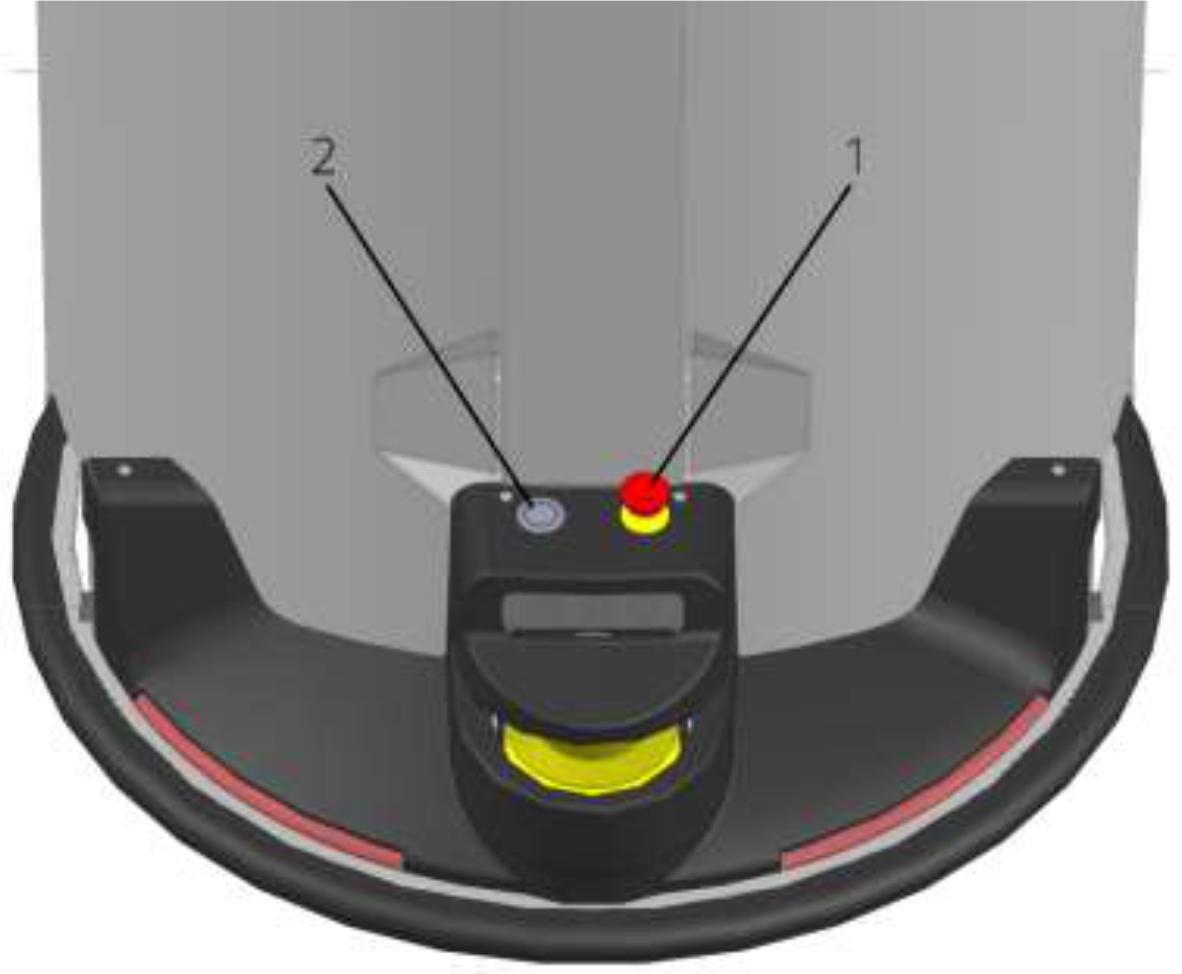
1) Noodstopknop, 2) Drukknop
De afdekking aan de voorzijde beschermt de binnenkant van de robot. Hierop zijn een noodstopknop (1) en een drukknop (2) gemonteerd.
Toren

1) Toren binnen, 2) Toren buiten
De toren bestaat uit twee delen, de binnentoren (1) en de buitentoren (2). De buitentoren beschermt mensen tegen het bereiken van bewegende machineonderdelen. De binnenste kolom wordt met de grijper uitgeschoven als de toren is uitgeschoven. De toren kan worden gedraaid en opent alleen in de richting van het rek.
Rugopslag
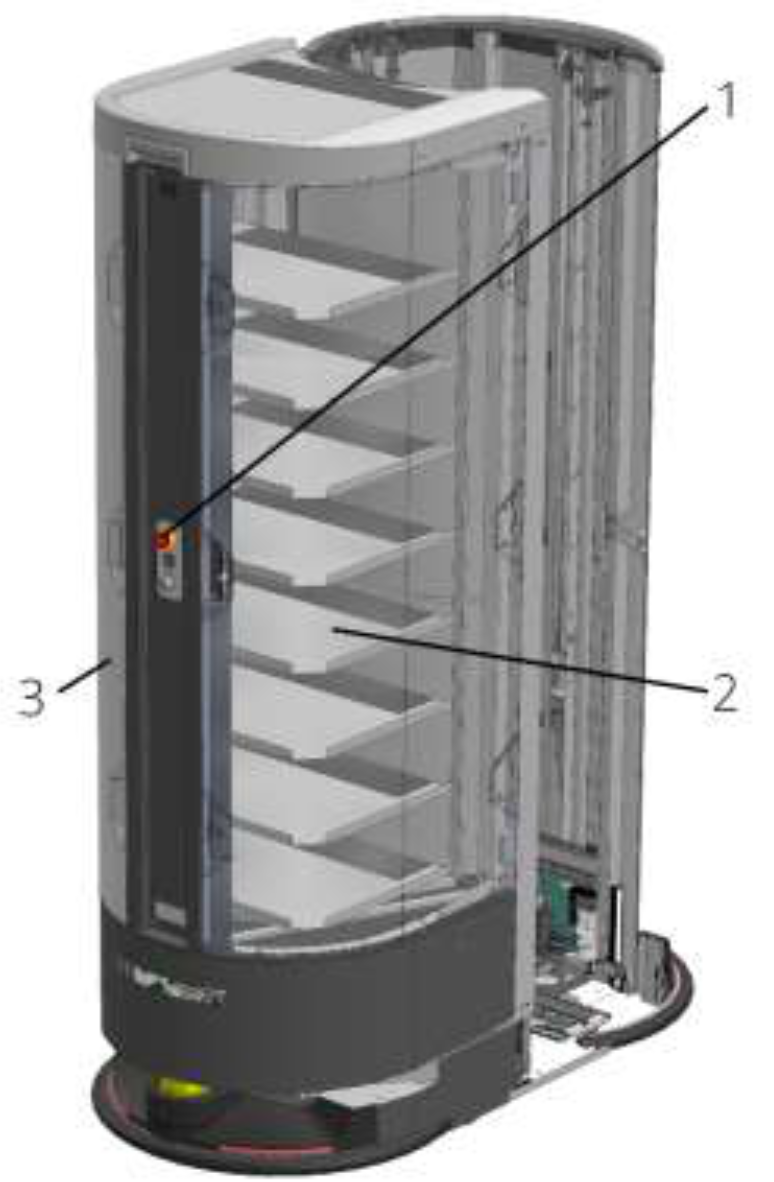
1) Bedieningspaneel, 2) Rugopslagdeur, 3) Rechter zijpaneel
De rugopslag dient als opslag voor de verzamelde dozen. Het bedieningspaneel (1) bevindt zich in het midden van de rugopslag. De rugopslagdeur en het deksel (2, 3) beschermen mensen tegen het bereiken van bewegende machineonderdelen. Ze zijn geschroefd en kunnen worden gedemonteerd voor onderhoud en procesobservatie.
Bedieningspaneel
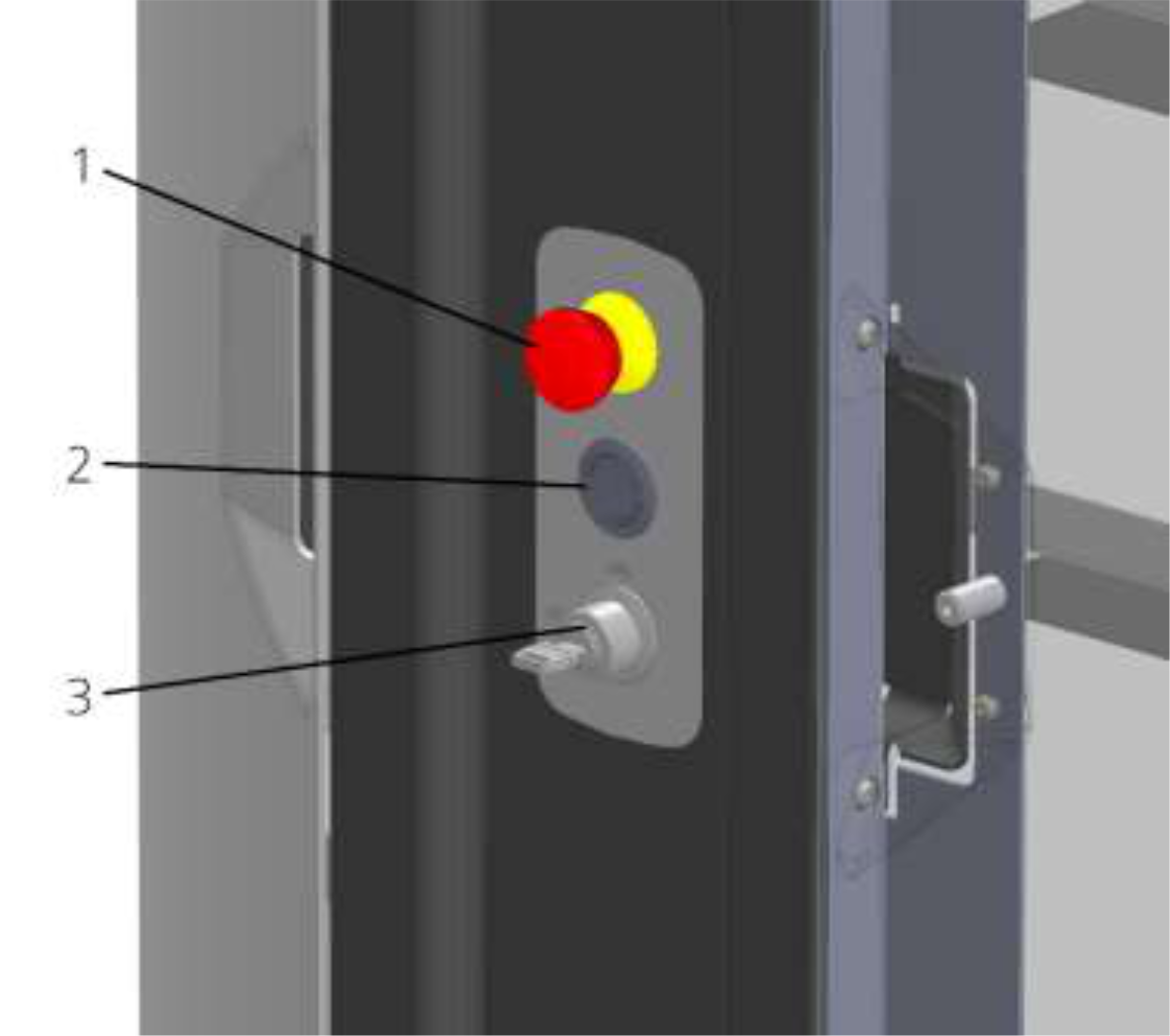
1) Noodstopknop, 2) Drukknop, 3) Sleutelschakelaar
Het bedieningspaneel bestaat uit drie elementen. Wanneer de noodstopknop (1) wordt ingedrukt, stopt deze alle gevaarlijke bewegingen van de robot. De drukknop (2) wordt gebruikt om de normale werking van de robot na een noodstop te herstellen. De sleutelschakelaar (3) kan worden gebruikt om de robot in en uit te schakelen.
Aandrijfbasis
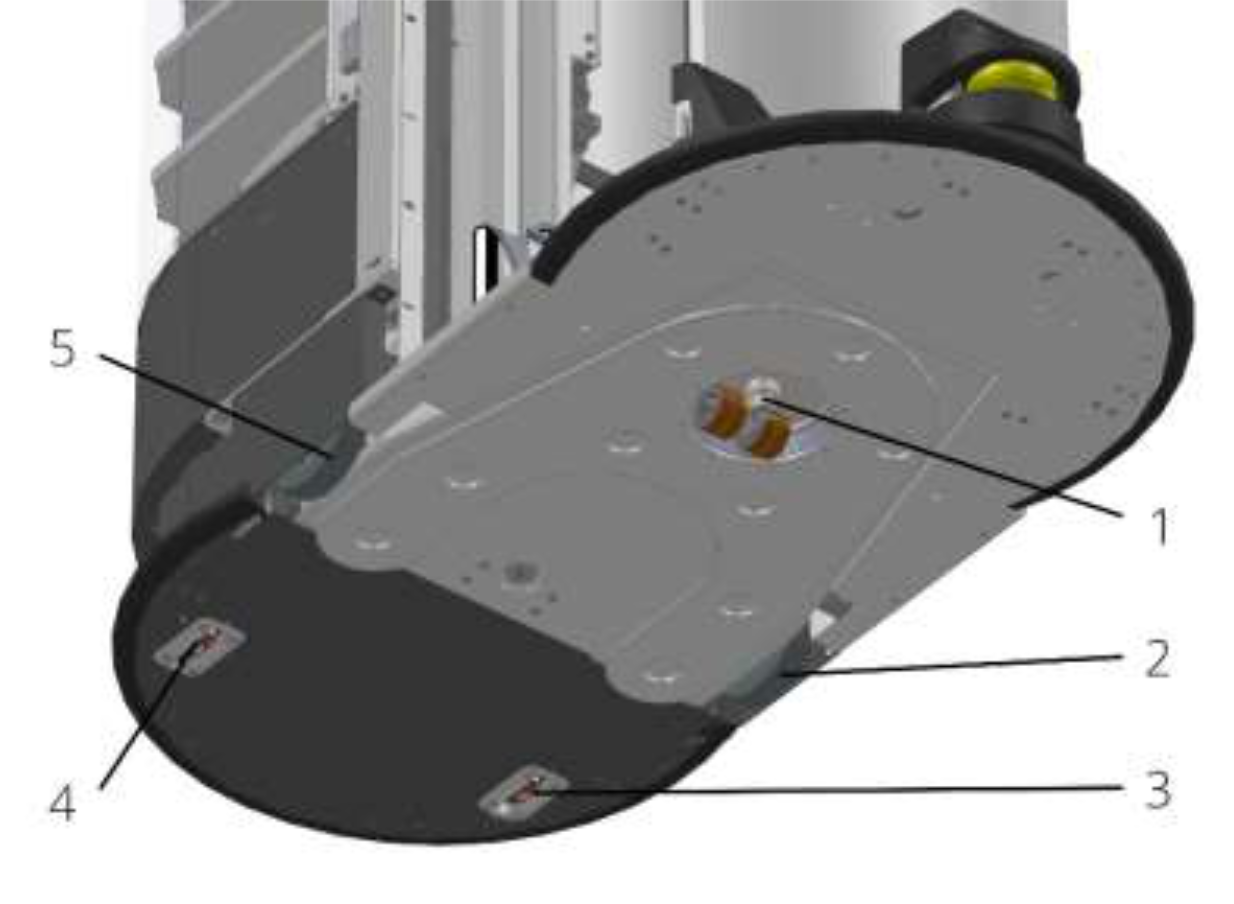
1) Zwenkwiel, 2) Aandrijfwiel links, 3) Laadcontact links, 4) Laadcontact rechts, 5) Aandrijfwiel rechts
.png?inst-v=a5276c9d-d703-4227-8c4d-b7392568c758) | Let op! Laserklasse 1 volgens DIN EN 60825-1:2003-10. Alle gebruikte sensoren hebben maximaal laserklasse 1. |
|---|
De aandrijfbasis maakt contact met de grond. Deze is uitgerust met veiligheidsvoorzieningen en sensoren om de omgeving rond de robot te detecteren. De industriële PC bestuurt de robot, de veiligheidsbesturing voorkomt gevaarlijke bewegingen van de robot.
Oplaadstation

Het oplaadstation wordt gebruikt om de accu's van de robot op te laden. Het oplaadstation wordt automatisch door de robot opgezocht tijdens normale werking. Een uitgeschakelde robot kan handmatig naar het oplaadstation worden geduwd (zie "De robot handmatig opladen").
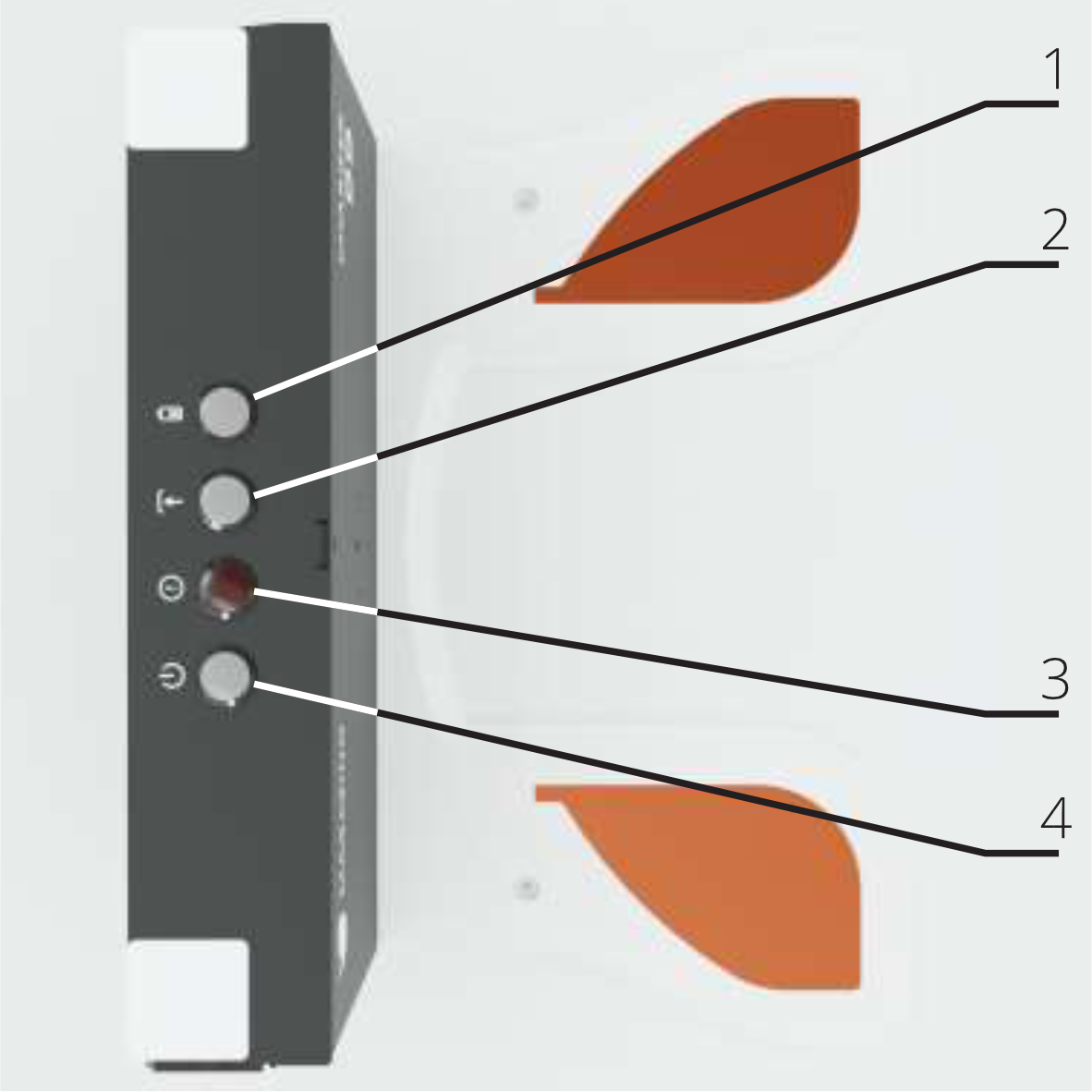
1) Oplaadstatus, 2) Dockingstatus, 3) Foutdetectie, 4) Voedingsstatus.
Het oplaadstation heeft vier led's boven het laadstation. De afzonderlijke led's en de interactie van meerdere led's geven feedback over de huidige status van het oplaadstation en het oplaadproces.
Problemen met het oplaadstation oplossen
 | Betekenis |
 | Het oplaadstation is uitgeschakeld.
|
 | Het oplaadstation start op.
|
 | Het oplaadstation heeft een fout gedetecteerd.
|
 | Er is een robot gedetecteerd, maar die bevindt zich nog niet in de oplaadpositie. Verander de positie van de robot totdat de oplaadpositie is gedetecteerd. |
 | De robot wordt opgeladen. |
 | De robot is volledig opgeladen. |
Pictogram | Betekenis | Pictogram | Betekenis | ||
|---|---|---|---|---|---|
 | De led brandt niet. |  | Led knippert | ||
 | Led brandt. |  | Led knippert | ||
Problemen met het oplaadstation oplossen
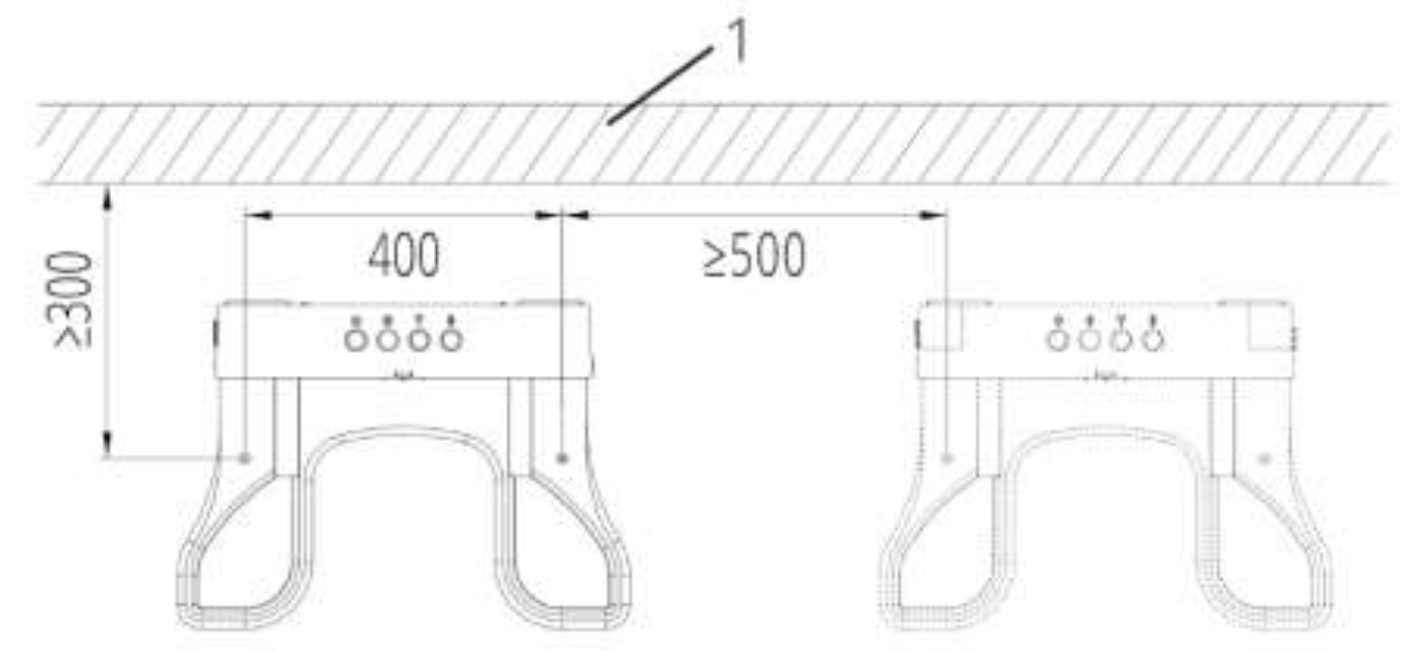
1) Muur
De oplaadstations moeten stevig in de vloer worden geschroefd. De bevestigingsgaten moeten worden voorbereid zoals hierboven aangegeven.
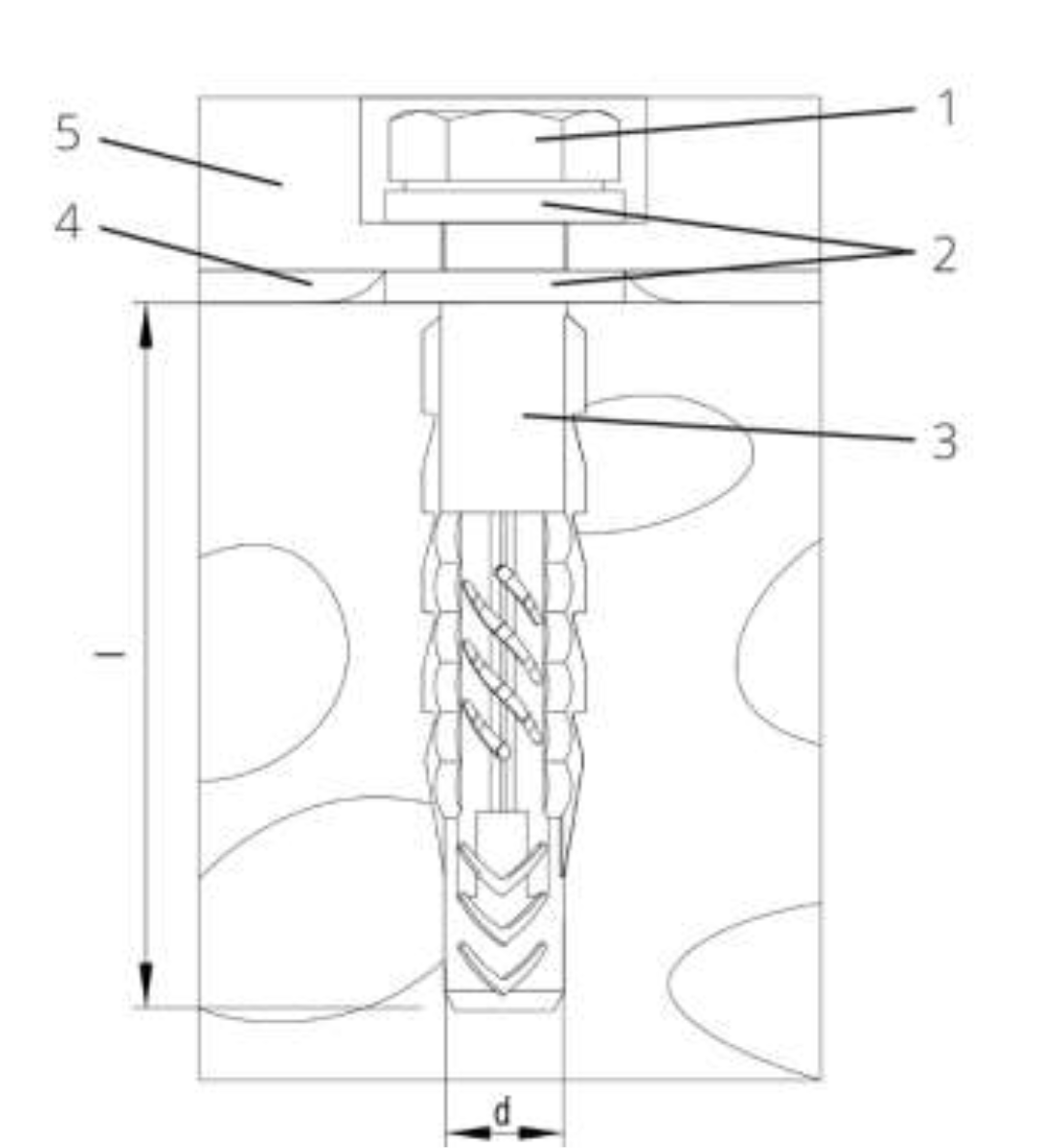
1) Zeskantbout (d = 6 mm, l ≥ 30 mm), 2) Sluitring, 3) Deuvel, 4) Schuimrubberen mat, 5) Grondplaat van oplaadstation