
Allgemein
 | Hinweis! Der A-bewertete Emissionsschalldruckpegel des Roboters beträgt weniger als 70 dB(A). |
|---|
Bestimmungsgemäße Verwendung
Die bestimmungsgemäße Verwendung beschränkt sich ausschließlich auf die Angaben in dieser Betriebsanleitung. Eine von den Angaben in dieser Betriebsanleitung abweichende Verwendung gilt als nicht bestimmungsgemäß und kann zum Verlust der Betriebserlaubnis führen.
Als bestimmungsgemäße Verwendung wird Folgendes angesehen:
Betrieb in einer industriellen Umgebung mit eingeschränktem Zugang für ungeschultes Personal.
Autonomes Fahren bei hohen und sicheren Geschwindigkeiten.
Autonomes Greifen, Speichern und Absetzen von Ladungsträgern mit einem Gesamtgewicht von bis zu 20 kg.
Manuelle Manipulation des Greifers, nachdem der Not-Halt-Taster aktiviert wurde, um eine Störung zu beheben.
Betrieb, Wartung und Instandhaltung durch geschultes Personal.
Als nicht bestimmungsgemäße Verwendung gilt einschließlich, jedoch nicht beschränkt auf:
Betrieb außerhalb einer industriellen Umgebung.
Betrieb in einer industriellen Umgebung ohne Zugangsbeschränkungen für ungeschultes Personal.
Betrieb in der Nähe von Treppen, Rampen und Gruben, die nicht ausreichend gegen das Herabfallen des Roboters gesichert sind.
Betrieb auf Böden, die die Anforderungen für einen sicheren Betrieb nicht erfüllen.
Betrieb in einem explosionsgefährdeten Bereich.
Transport von Ladungsträgern mit einem Gesamtgewicht von mehr als 20 kg.
Transport von Menschen und Tieren.
Betrieb, Wartung und Instandhaltung durch ungeschultes Personal.
Änderungen jeglicher Art an Hard- und Software, die nicht schriftlich von Magazino genehmigt wurden.
Manuelles Arbeiten an der Maschine ohne betätigen des Not-Halt-Tasters.
Anforderungen an die Arbeitsumgebung
Der Roboter navigiert selbstständig. Die autonome Navigation stellt besondere Anforderungen an das Arbeitsumfeld.
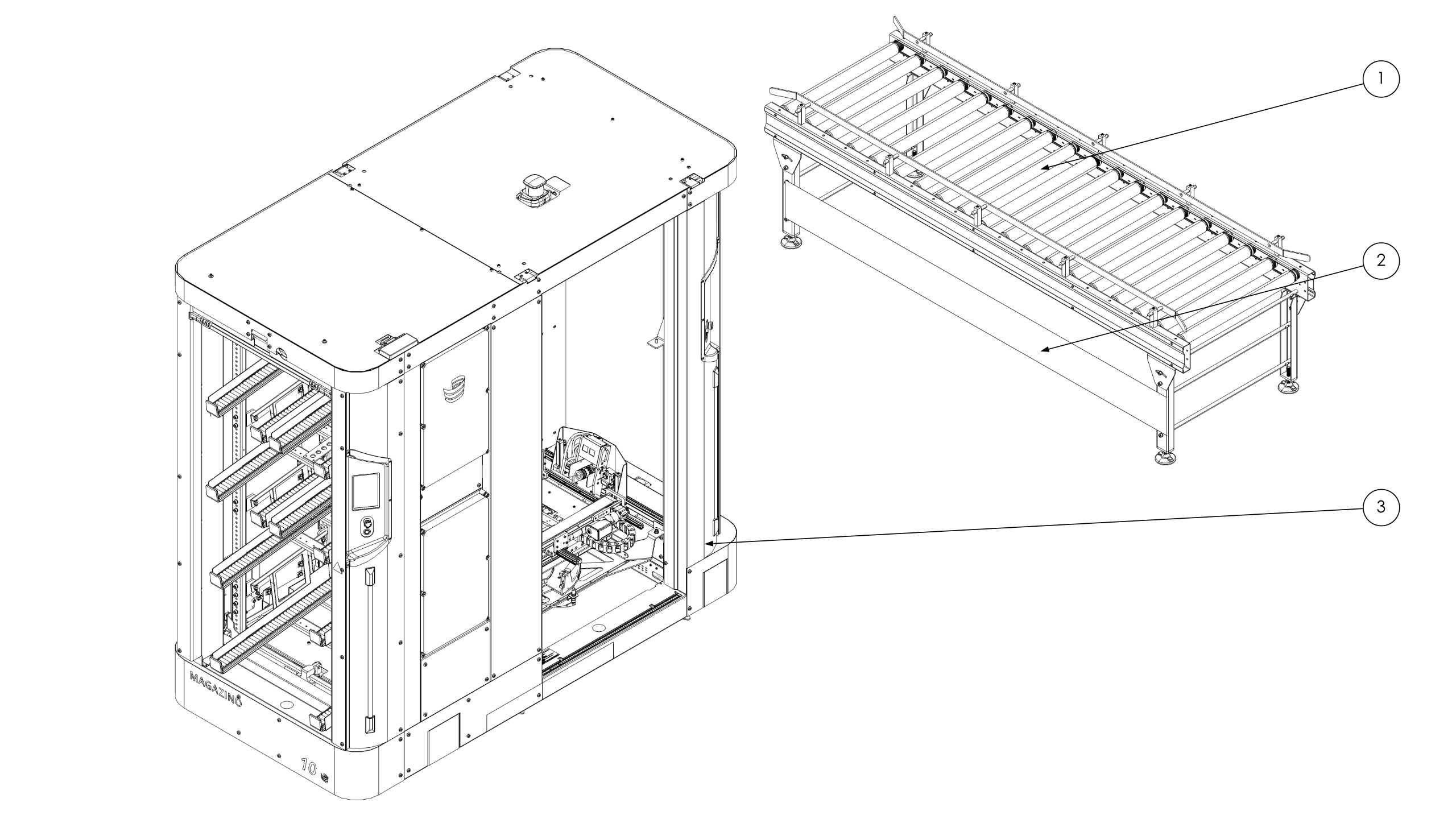
POSITION | BESCHREIBUNG |
1 | Hindernis über der Laserebene |
2 | Blech auf Laserebene |
3 | SOTO 2.1.1 |
Alle Strukturen und Hindernisse, mit denen SOTO kollidieren könnte und die sich über oder unter der Laserebene (12 cm) befinden, müssen in Höhe des Lasers dargestellt werden, zum Beispiel durch Bleche, damit der Roboter sie sicher erkennen kann.
Der Boden muss die folgenden Eigenschaften aufweisen:
Frei von Hindernissen und Verunreinigungen, die die Eigenschaften des Bodens beeinträchtigen.
Entspricht den einschlägigen Richtlinien des VDMA.
Hat eine ausreichende Tragfähigkeit für den Betrieb von SOTO (maximales Robotergewicht bis zu 1000 kg).
Eben, horizontal und gleichmäßig nach DIN 18202 und DIN 15185.
Mechanisch widerstandsfähig gegen Abrieb.
Mechanisch widerstandsfähig gegen Verformung.
Bodenmarkierungen in allen Betriebsgefahrbereichen, insbesondere an Übergabe- und Ladestationen.
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Warnung! Unfallgefahr! Wesentliche Veränderungen der Eigenschaften des Bodens nach der Inbetriebnahme können zu Unfällen führen. Kontaktieren Sie das Magazino, wenn sich die Eigenschaften des Bodens wesentlich ändern. Eine Anpassung der Höchstgeschwindigkeit kann erforderlich sein. |
|---|
Der SOTO-Arbeitsbereich muss die folgenden Eigenschaften aufweisen:
Durchschnittliche Umgebungstemperatur, Dauerbetrieb: +22 °C.
Maximale Umgebungstemperatur: +35 °C.
Niedrigste Umgebungstemperatur: +10 °C.
Maximale Luftfeuchtigkeit: 95%, nicht kondensierend.
Höhenlage: bis zu 1 000 m.
Anforderungen an den Betreiber
Der Roboter wurde nach dem neuesten Stand der Technik konzipiert, um maximale Sicherheit zu gewährleisten. Entscheidend für den sicheren Betrieb ist jedoch neben einer sicheren Konstruktion auch die Einhaltung grundlegender Vorschriften und Verhaltensweisen, die vom Betreiber kommuniziert und befolgt werden müssen. Der Betreiber ist jede natürliche oder juristische Person, in deren Auftrag der Roboter eingesetzt wird.
Die Anforderungen an den Betreiber sind:
Dokumentierte Schulungen für das Personal, das regelmäßig mit dem SOTO in Kontakt kommt.
Einhaltung der Unfallverhütungsvorschriften.
Sauberhalten des Bereichs, in dem der Roboter arbeitet.
Sicherstellen, dass der Roboter ausschließlich für seinen bestimmungsgemäßen Zweck verwendet wird.
Sicherstellen, dass das Personal, das mit dem Roboter in Kontakt kommt, die Betriebsanleitung des Roboters gelesen und verstanden hat.
Durchführen und Dokumentieren der regelmäßigen Prüfungen und Reinigungsarbeiten.
Anforderungen für die Wartung
Die Wartung der Roboter erfolgt nach einem vereinbarten Zeitplan. Die Arbeitsumgebung muss folgende räumliche und organisatorische Anforderungen erfüllen, damit Servicetechniker diese Verfahren durchführen können.
Tests | Anforderungen | Beispiele |
|---|---|---|
Bremstests |
| Ein Gang in der Produktion, der für Bremstests abgesperrt wurde. 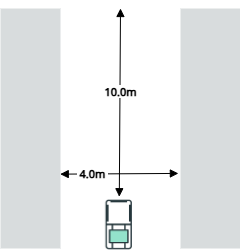 |
Bluespot-Check | 4 m Freiraum vor und hinter dem SOTO | Normalerweise kann dies in einem normalen Gang geschehen, wenn SOTO für ein paar Minuten angehalten werden kann. 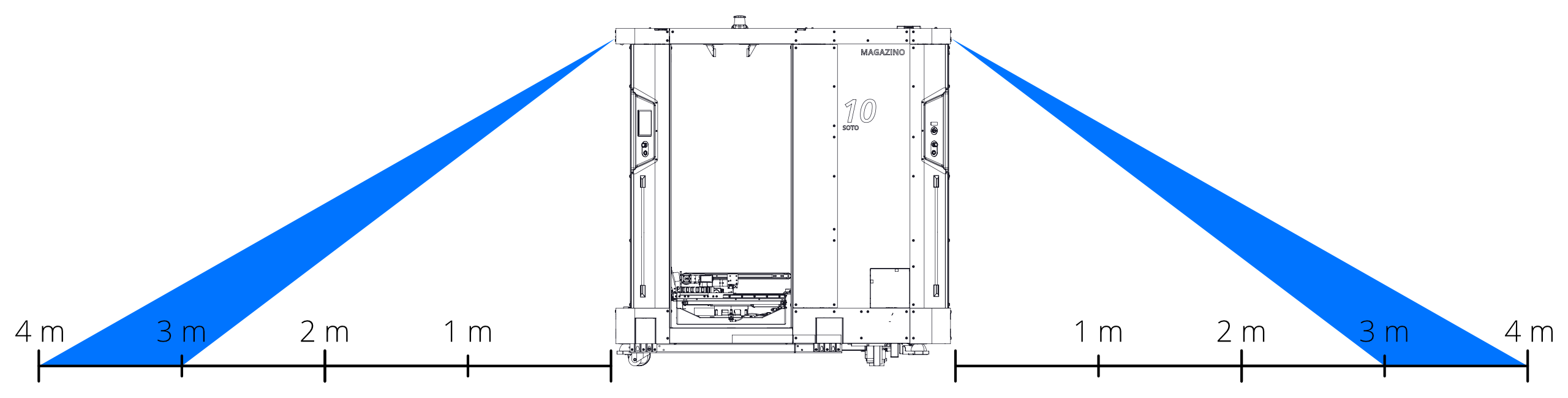 |
Laserscanner-Ausrichtungsprüfung |
|  |
Unten Laserscanner Neigung/Rolle | 3x Muster müssen in einem Abstand von 2,5 m vom Roboter auf dem Boden platziert werden (eines vor, eines links und eines rechts vom jeweiligen Laserscanner). |  |
Allgemeiner Raum um den Roboter | SOTO Stellfläche 2146 × 1060 mm + 1m zu jeder Seite = ca. 4.2m x 3.2m | 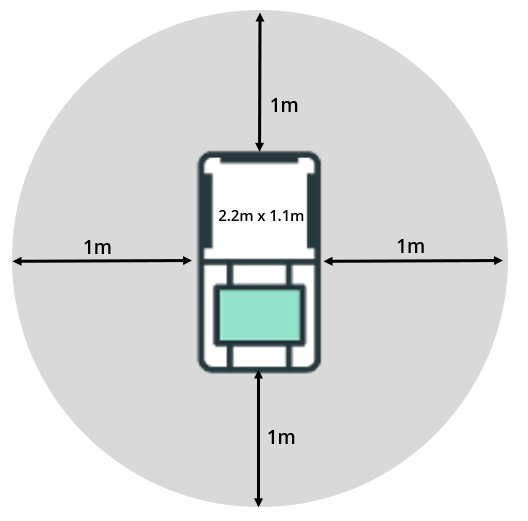 |
Optional | ||
Steckdose für Laptop und Staubsauger | 230V |
Personal
Um den Roboter bestimmungsgemäß zu verwenden, muss das Personal geschult werden.
Geschultes Personal
Analog zu DIN VDE 0105-100: Eine ausgebildete/unterwiesene Person ist eine Person, die über die ihr übertragenen Aufgaben und die möglichen Gefährdungen bei unsachgemäßem Verhalten unterwiesen und ggf. geschult wurde. Er/sie wurde auch über die notwendigen Schutzausrüstungen und Schutzmaßnahmen unterrichtet. Das zu schulende, unterweisende oder allgemein ungeschulte Personal darf nur unter ständiger Aufsicht einer erfahrenen Person arbeiten.
In bestimmten Situationen müssen Maßnahmen ergriffen werden, die über die bestimmungsgemäße Verwendung hinausgehen. Diese Tätigkeiten dürfen nur von einer Fachkraft ausgeführt werden.
Fachkraft
Analog zu DIN VDE 0105-100: Eine Fachkraft ist eine Person, die auf Grund ihrer fachlichen Ausbildung, Kenntnisse und Erfahrungen die ihr übertragenen Arbeiten beurteilen und mögliche Gefährdungen erkennen kann. Außerdem ist sie mit den einschlägigen Vorschriften vertraut.
Bereiche
Betriebsbereich
Flurförderzeuge - Sicherheitsanforderungen und Verifizierung - Teil 4: Fahrerlose Flurförderzeuge und ihre Systeme (ISO 3691-4:2023):
"Auf beiden Seiten des Weges muss ein Mindestabstand von 0,5 m Breite und 2,1 m Höhe vorhanden sein. Dies wird zwischen dem Pfad und den angrenzenden festen Strukturen entlang des Pfades gemessen."
Betriebsgefahrbereich
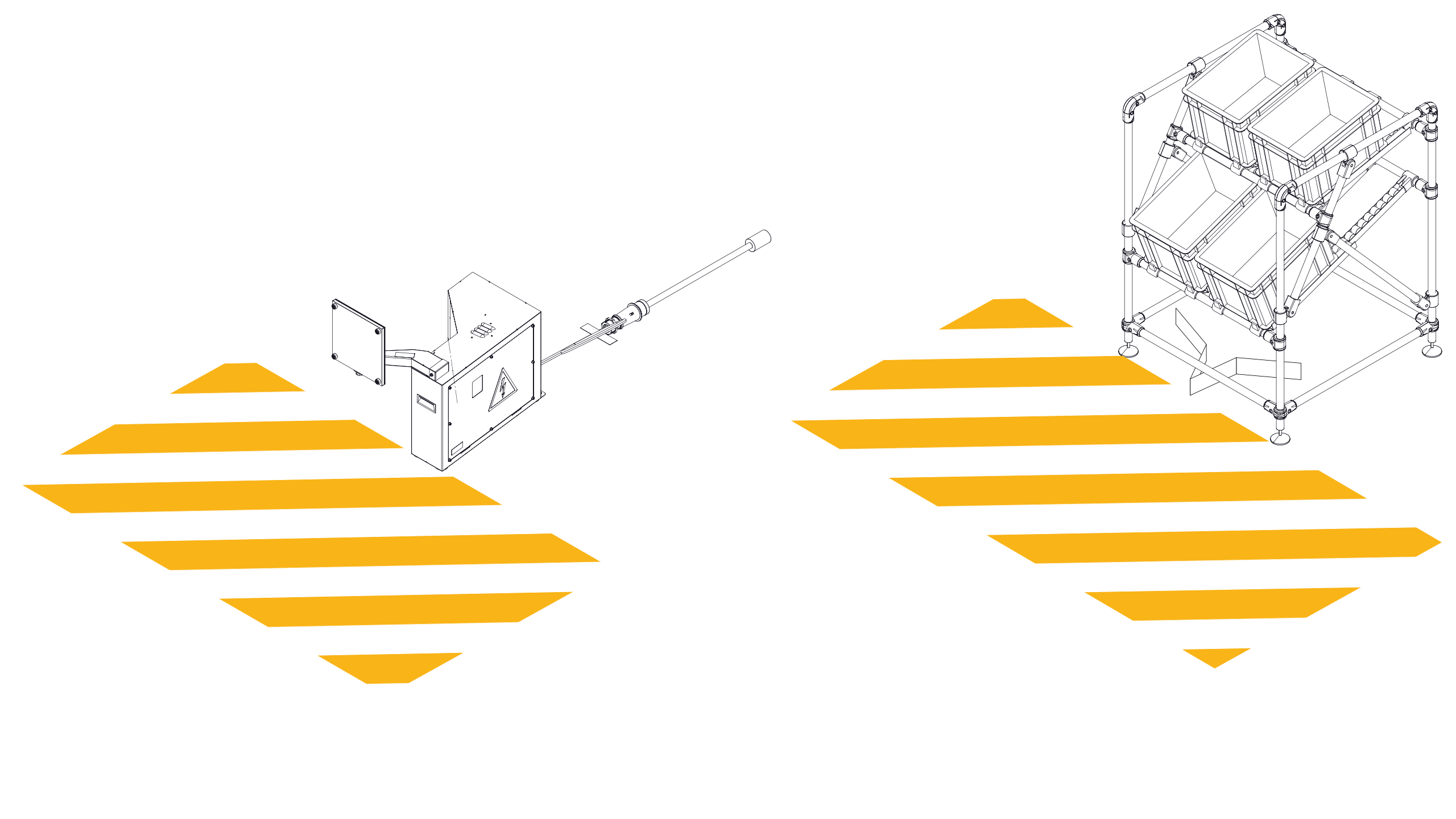
Beispiel einer Bodenmarkierung vor dem Ladegerät und der Übergabestation
Flurförderzeuge - Sicherheitsanforderungen und Verifizierung - Teil 4: Fahrerlose Flurförderzeuge und ihre Systeme (ISO 3691-4:2023):
in Bereich mit unzureichendem Freiraum (siehe A.2.1) oder ein Bereich, der nicht durch Personenerkennungseinrichtungen geschützt werden kann, muss als „Betriebsgefahrbereich“ (siehe Tabelle A.1 und Tabelle A.2) bezeichnet und entsprechend gekennzeichnet sein. Ein Betriebsgefahrbereich muss durch geeignete Schilder oder vorzugsweise Bodenmarkierungen deutlich gekennzeichnet sein. Eine Verwechslung mit anderen Markierungen und Schildern ist zu vermeiden. In diesem Betriebsgefahrbereich muss die Geschwindigkeit des FTF den Angaben in Tabelle A.1 und Tabelle A.2 entsprechen und das FTF muss zusätzliche akustische und/oder optische Warnsignale ausgeben. Wenn kein ausreichender Freiraum und kein Fluchtweg für Fußgänger mit mindestens 0,5 m Breite und 2,1 m Höhe (siehe Tabelle A.1 und Tabelle A.2 mit den Freiraummaßen C.1, C.2 und C.3) vorhanden ist, muss die Personenerkennungseinrichtung aktiv sein, bis der Abstand zwischen der Kante der aktiven ESPE-Erkennungsfelder und den umgebenden Objekten (z. B. Blocklager) 180 mm oder weniger entspricht, um sicherzustellen, dass dieser Bereich frei von Personen ist