
ARC Tutorial „Robotergelenke befreien"
Description | Is triggered when homing throws a critical event. |
Link | |
Video | N/A |
Navigieren Sie zum Abschnitt Dashboard und klicken Sie auf „Fehler lösen“ in der oberen linken Ecke. Sie können auch auf „Alle TORUs anzeigen“ klicken, um zu sehen, wo sich der betroffene Roboter befindet.

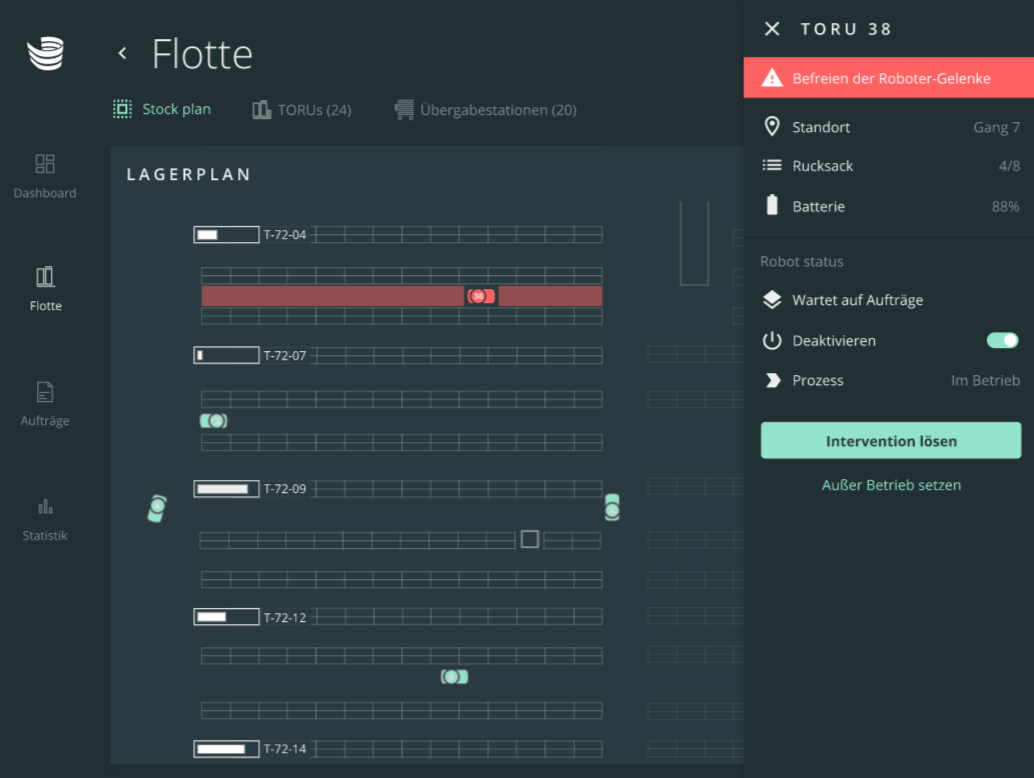
Klicken Sie auf das rote Robotersymbol und drücken Sie auf „Intervention Lösen“ in der rechten Leiste.
Finden Sie den TORU-Roboter in Ihrem Lager und drücken Sie den Not-Halt-Taster.

Der Zustand des Not-Halt-Tasters sollte auf „Gedrückt" wechseln. Drücken Sie anschließend auf „Weiter".

Überprüfen Sie den Roboter auf Fehler, wie z. B. Boxen, die den Greifer blockieren oder im Turm stecken bleiben. Entfernen Sie die Box aus dem Roboter und drücken Sie 'Weiter'.

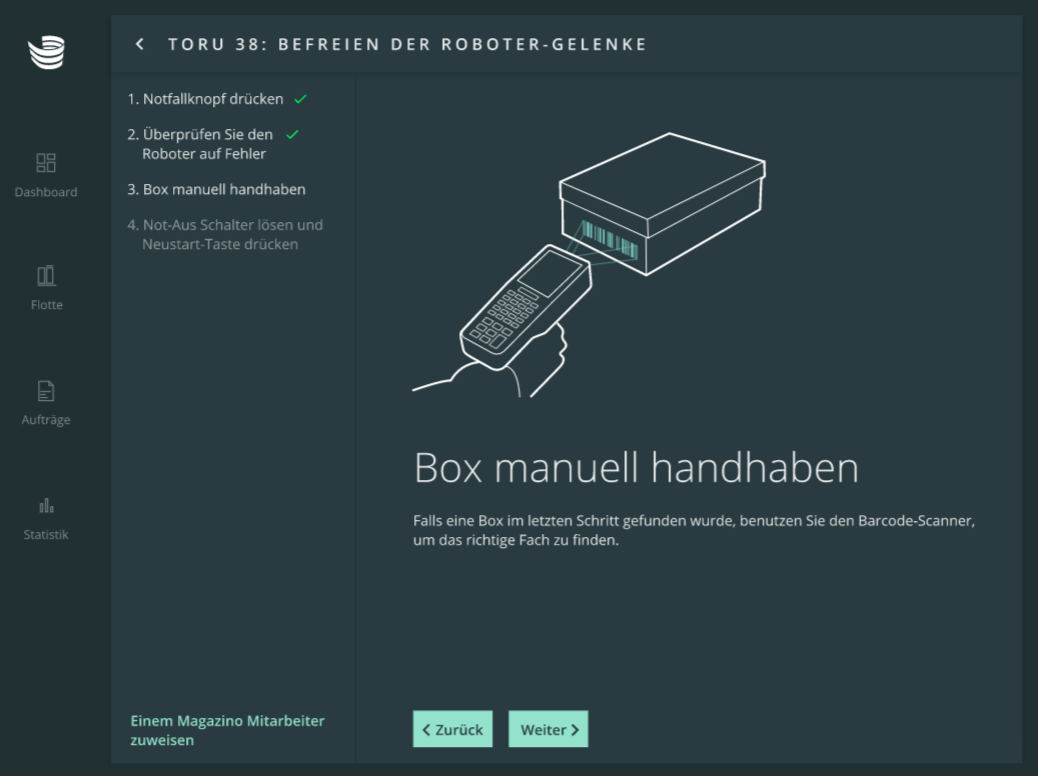
Wenn im vorigen Schritt eine Box gefunden wurde, verwenden Sie einen Barcode-Scanner, um das richtige Fach zu finden. Legen Sie die Box in das Fach und drücken Sie „Weiter".
Lösen Sie den Not-Halt-Taster und drücken Sie den Drucktaster am Roboter.

Der Status sollte in ARC auf „Gedrückt“ wechseln. Um die Intervention abzuschließen, drücken Sie 'Intervention abschließen'.
