
ARC Tutorial „Roboter delokalisiert" (erste Eskalation)
Machen Sie den betroffenen TORU ausfindig und drücken Sie den Not-Halt-Taster. Der Status des Not-Halt-Tasters sollte in ARC auf „Gedrückt“ wechseln. Drücken Sie anschließend auf „Weiter".

Schieben Sie den Roboter neben ein Regal im Hauptlager-Bereich und platzieren Sie ihn so, dass sich das Regal auf der rechten Seite befindet.

Lösen Sie den Not-Halt-Taster und drücken Sie einmal den Drucktaster. Drücken Sie dann 'Weiter'.

Tippen sie die Nummer des Fachs in das obere Eingabefeld ein, welches sich auf der rechten Seite des Roboters befindet.

Klicken Sie dann auf 'Versuchen zu relokalisieren'.

TORU wird versuchen, sich selbst zu relokalisieren, indem der Roboter ein paar Meter weiterfährt. Wenn die Relokalisierung nicht erfolgreich war, wiederholen Sie bitte die Schritte eins bis fünf.
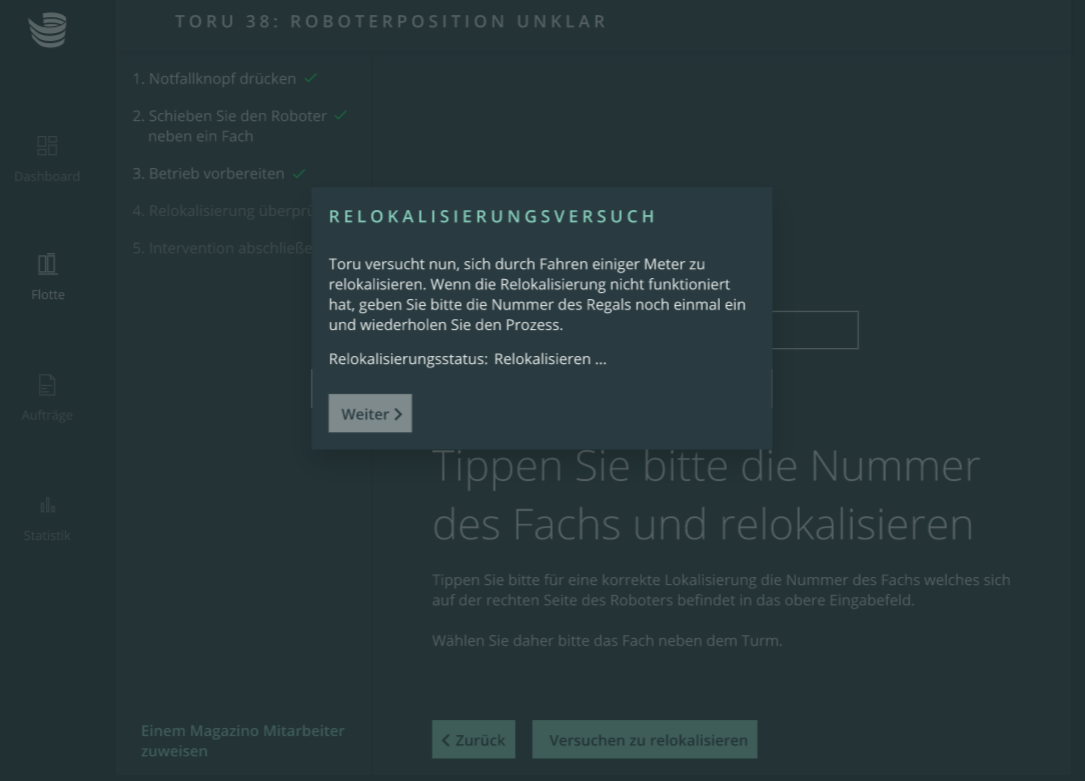
Nach erfolgreichem Abschluss drücken Sie 'Weiter'.

Um den Roboter wieder in Betrieb zu nehmen, drücken Sie 'Intervention abschließen'.