
{Kunde}: Training ARC Tutorial „ Box aus Greifer entfernen“
Description | A box is stuck in the gripper. Remove it. |
Link | Remove box from gripper, pick up, localized Remove box from gripper, pick up, unlocalized |
Videos |
Box aus dem Greifer nehmen, aufheben, lokalisieren
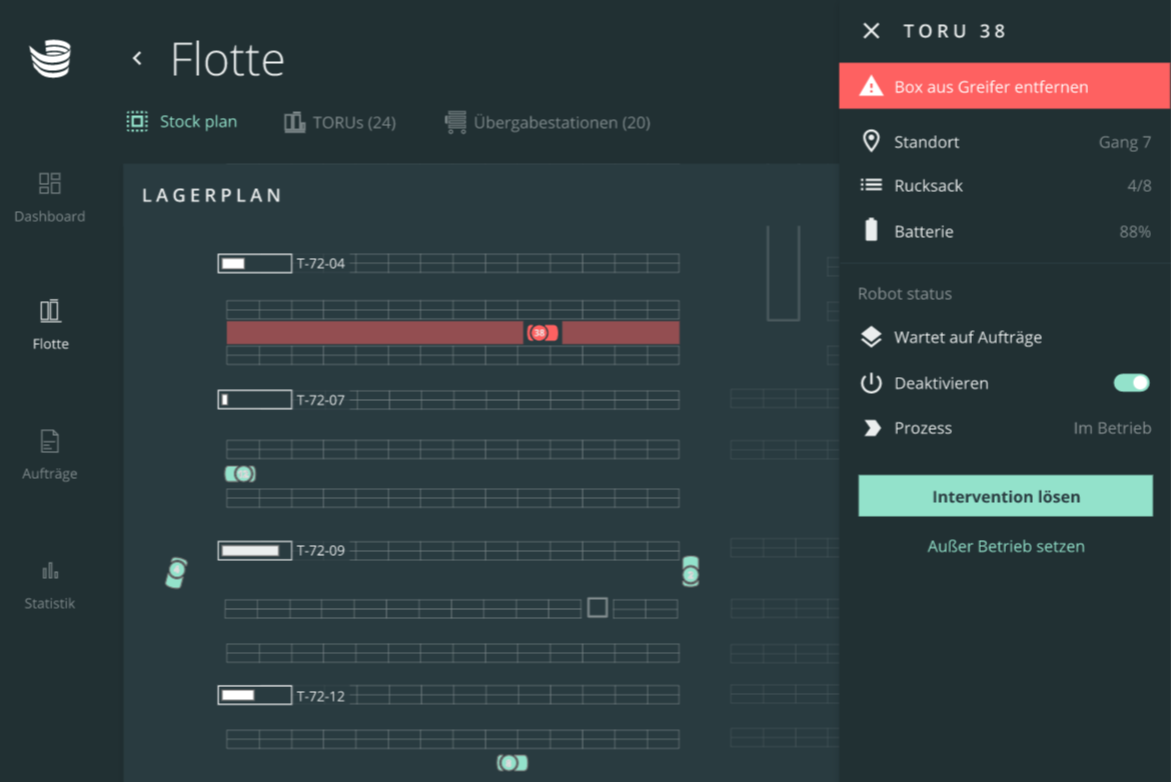
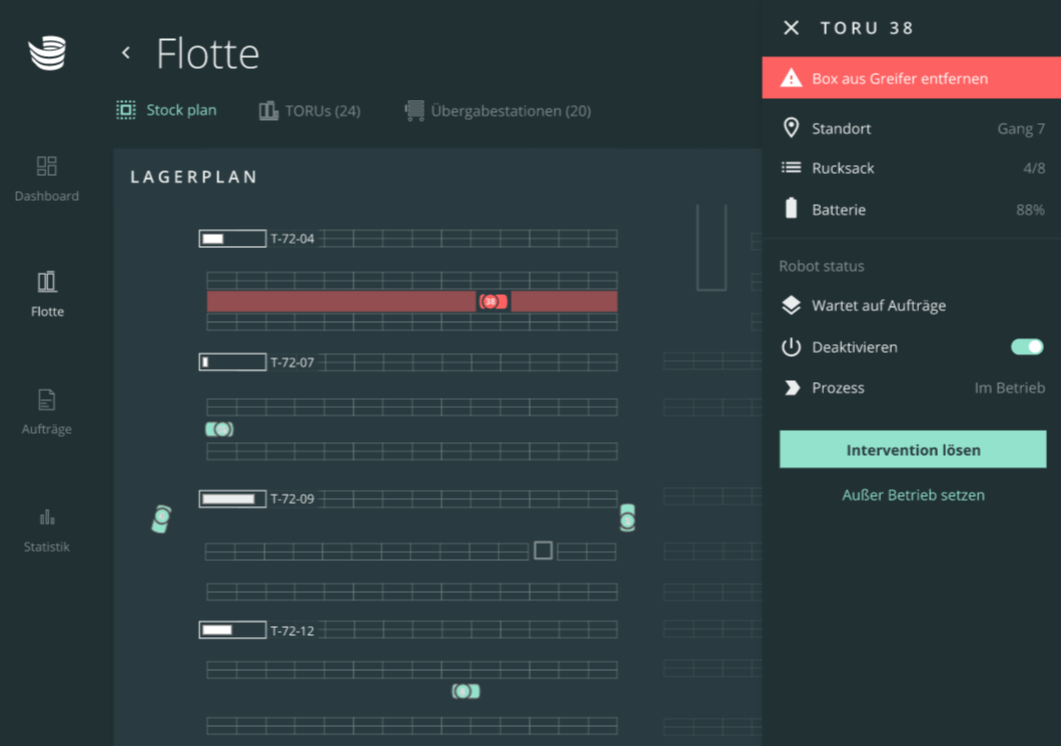
Wechseln Sie in ARC zum Bereich Flotte und drücken Sie auf das rote Robotersymbol. Drücken Sie dann die Schaltfläche "Fehler beheben".
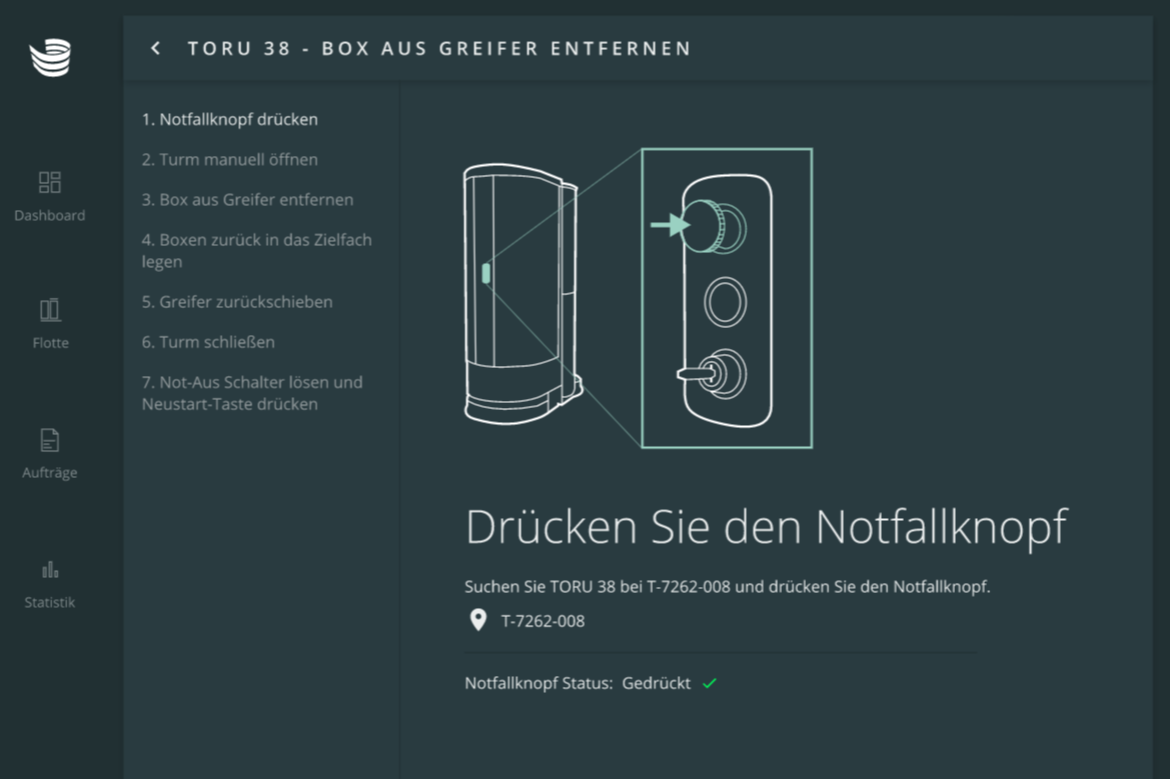
Begeben Sie sich zum Roboter und drücken Sie den Not-Halt-Taster. Der Status des Not-Halt-Tasters sollte im ARC auf „Gedrückt“ wechseln. Drücken Sie dann 'Weiter'.
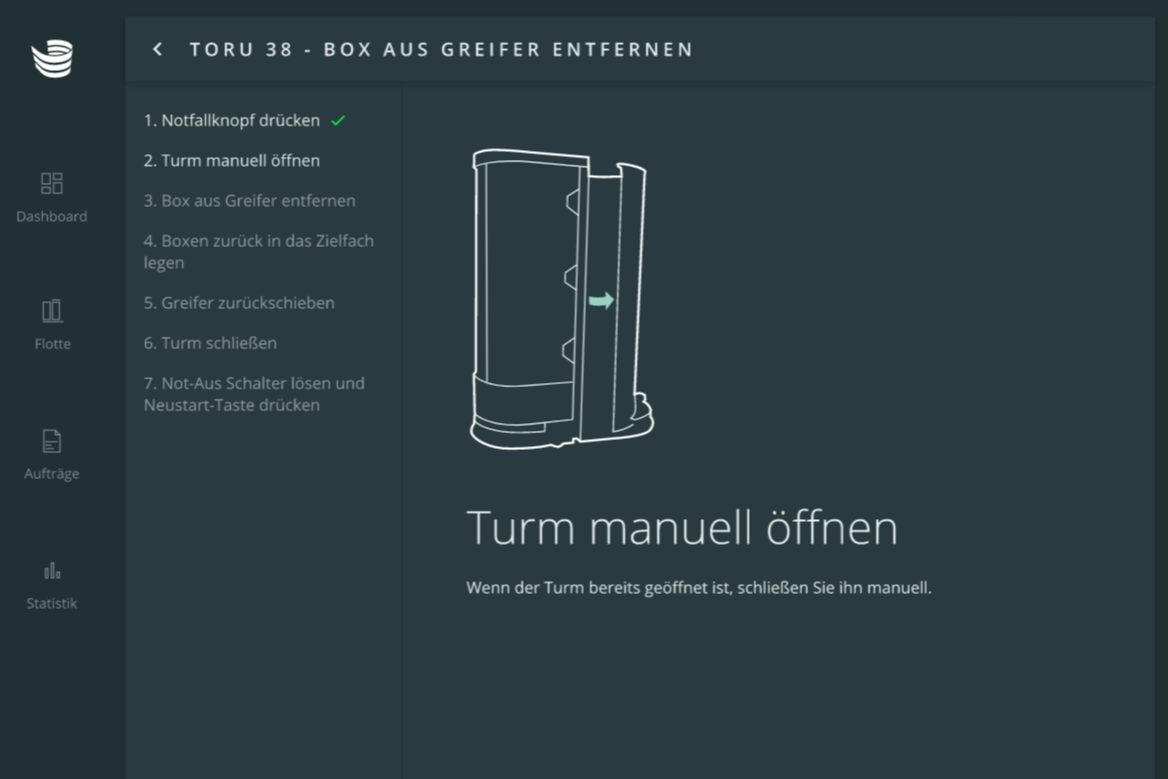
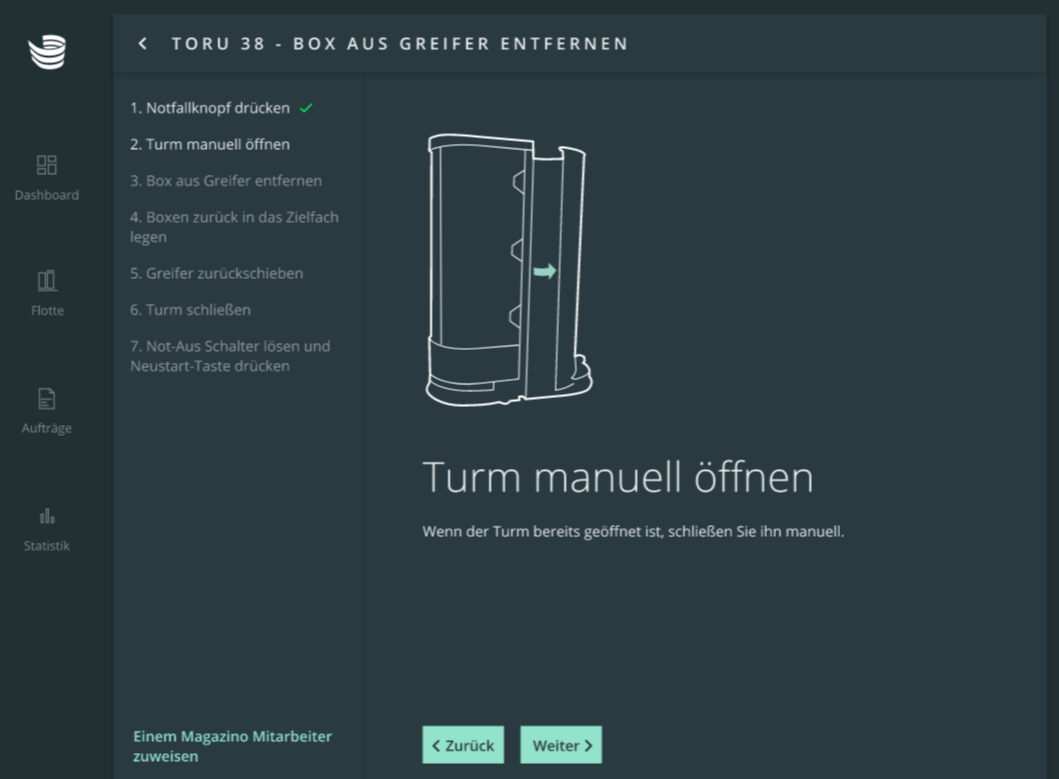
Öffnen Sie den Turm des Roboters von Hand, indem Sie ihn vorsichtig drehen. Drücken Sie dann 'Weiter' in ARC.
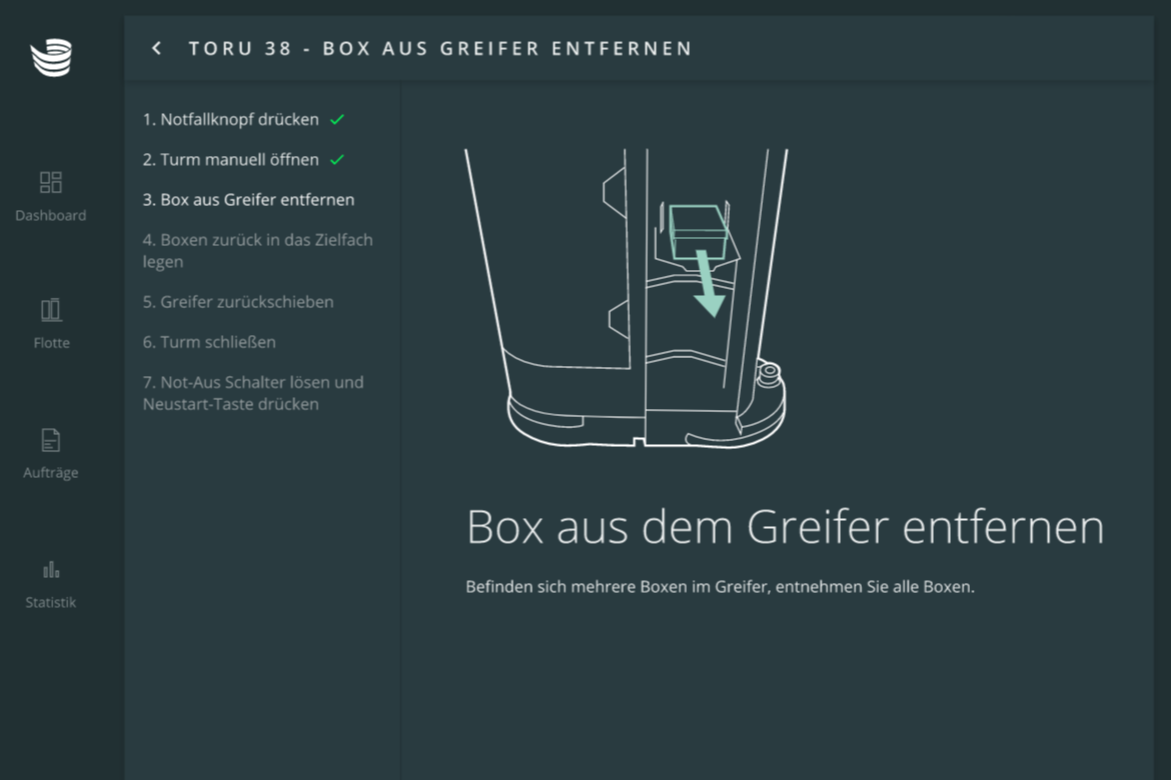
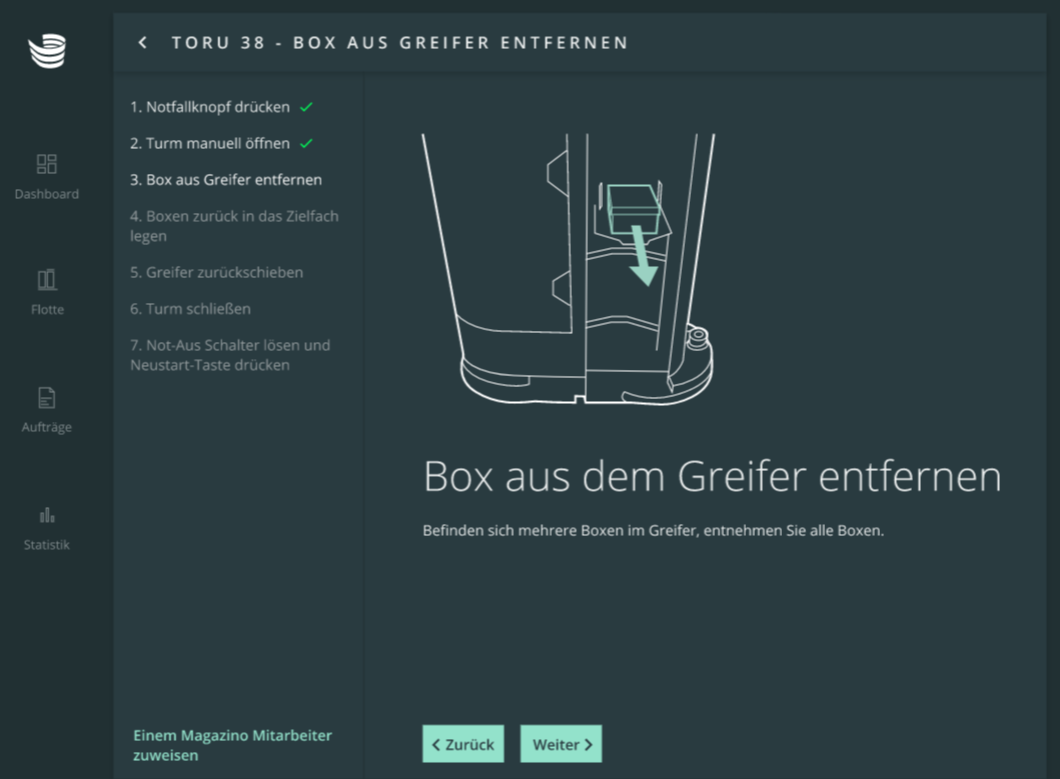
Entfernen Sie alle Boxen aus dem Greifer. Drücken Sie dann 'Weiter'.
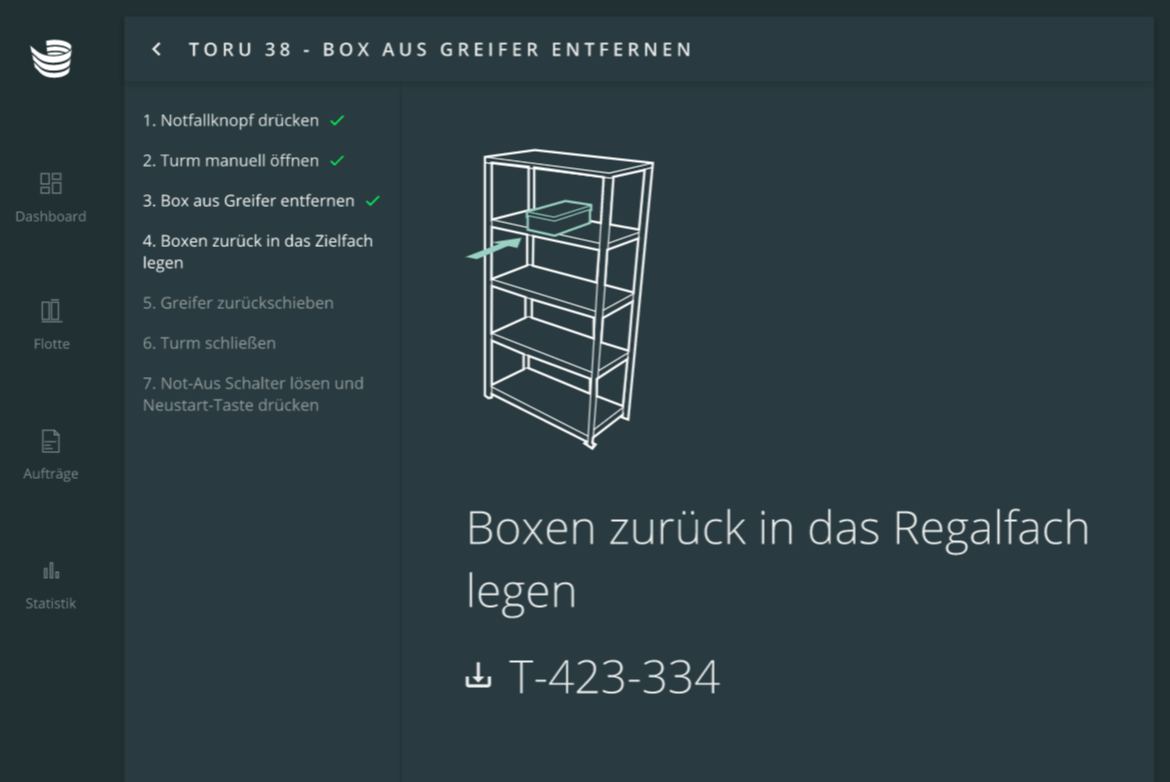
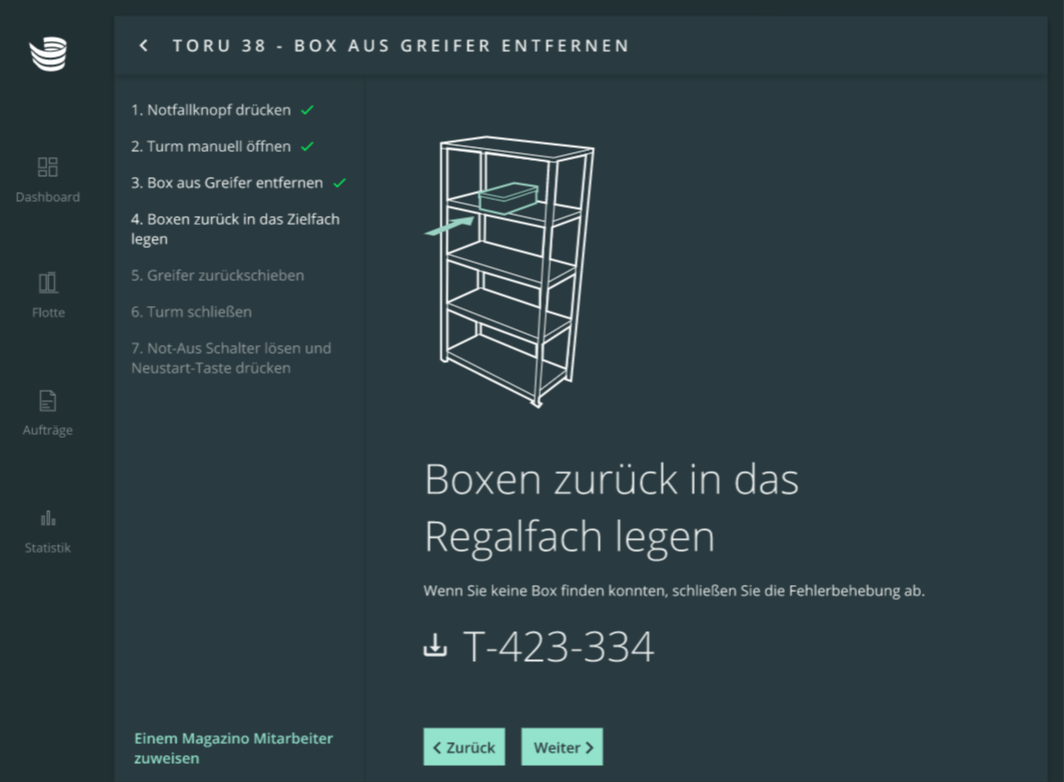
Legen Sie die Boxen in das angegebene Quellenfach. Drücken Sie dann 'Weiter'.
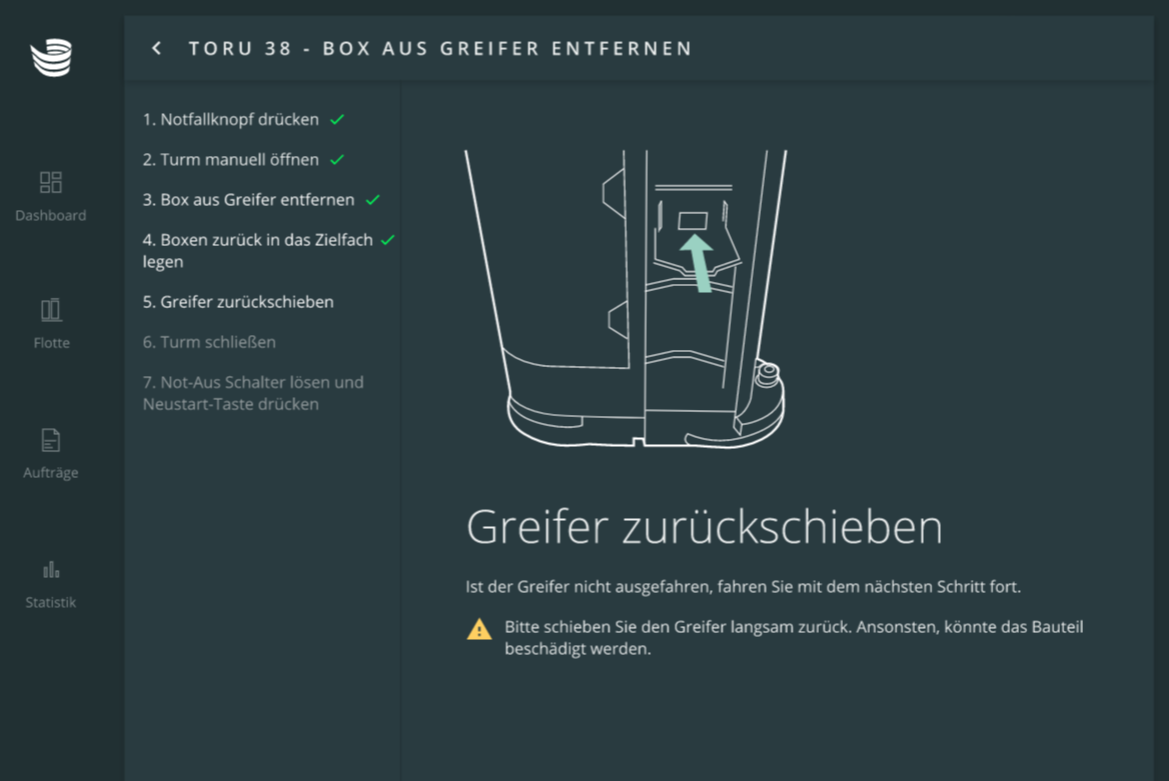
Wenn der Greifer herausragt, drücken Sie ihn vorsichtig zurück in den Turm. Achten Sie bitte darauf keine Bauteile zu beschädigen. Drücken Sie dann 'Weiter'.
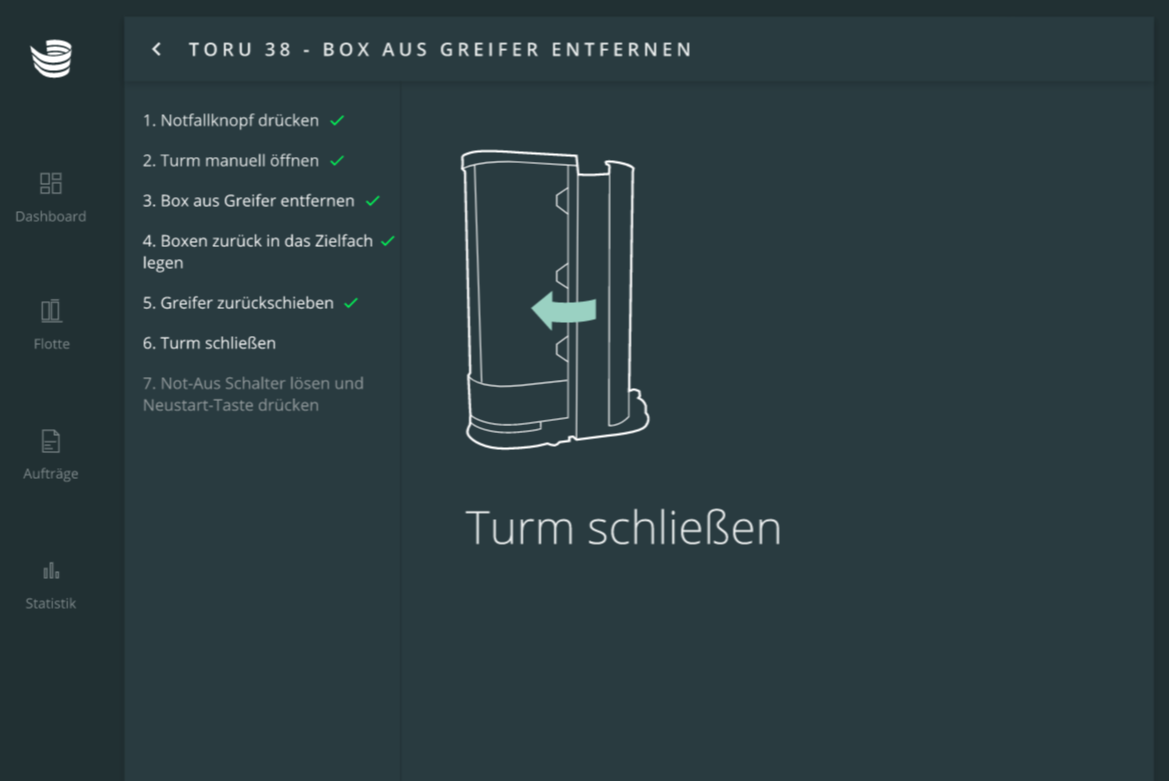
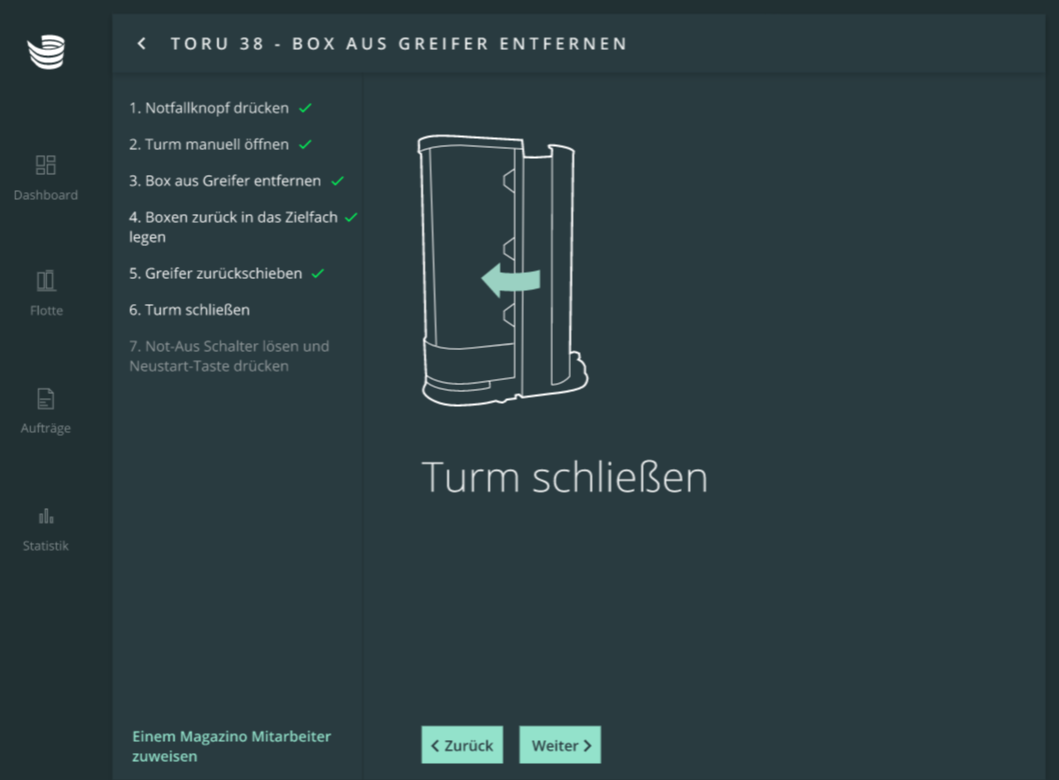
Schließen Sie den Turm und drücken Sie 'Weiter'.
Lösen Sie den Not-Halt-Taster am Roboter und drücken Sie den Drucktaster. Drücken Sie dann 'Weiter'.

Drücken Sie „Intervention abschließen“ und warten Sie, bis der Roboter neu startet. Überprüfen Sie, dass keine weiteren Fehler vorhanden sind.
Box aus dem Greifer nehmen, aufheben, nicht lokalisiert
Wechseln Sie in ARC zum Bereich Flotte und drücken Sie auf das rote Robotersymbol. Drücken Sie dann die Schaltfläche "Fehler beheben".
Begeben Sie sich zum Roboter und drücken Sie den Not-Halt-Taster. Der Status des Not-Halt-Tasters sollte im ARC auf „Gedrückt“ wechseln. Drücken Sie dann 'Weiter'.

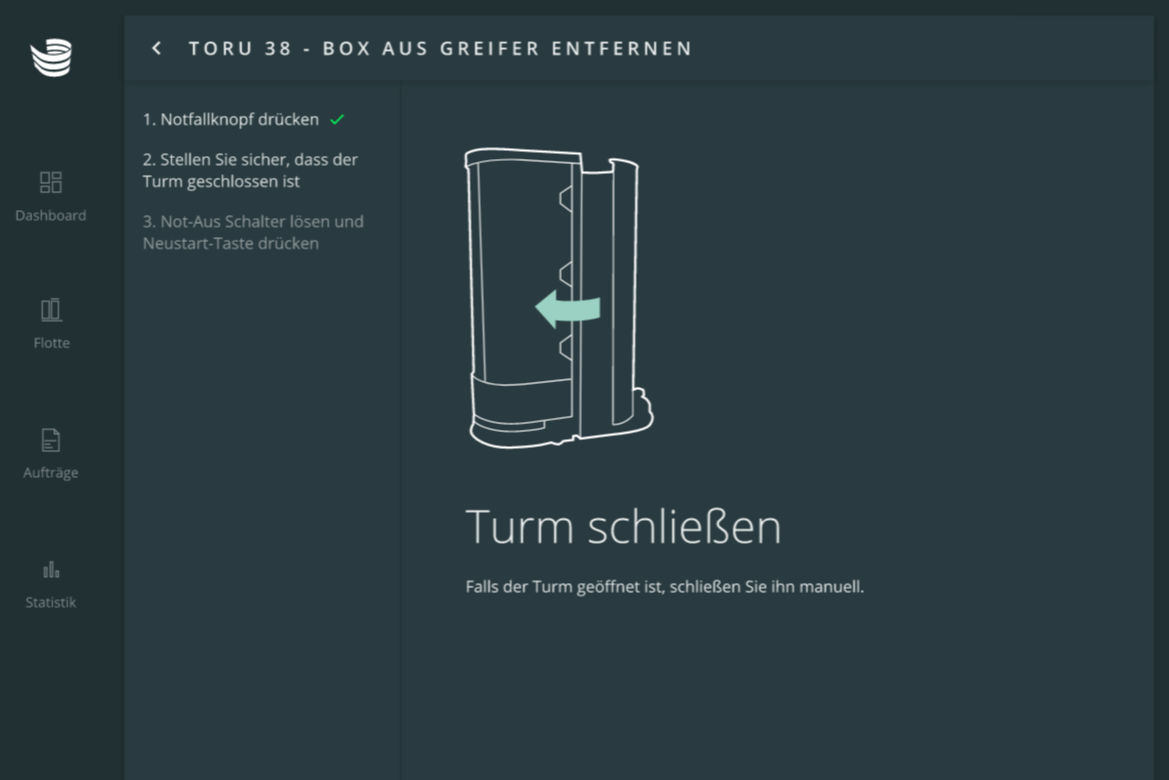
Wenn der Turm des Roboters geöffnet ist, schließen Sie ihn manuell. Drücken Sie dann 'Weiter'.
Lösen Sie den Not-Halt-Taster und drücken Sie den Drucktaster am Roboter. Der Status sollte in ARC auf „Gedrückt“ wechseln. Drücken Sie dann 'Weiter'.

Drücken Sie „Intervention abschließen“ und warten Sie, bis der Roboter neu startet. Überprüfen Sie, dass keine weiteren Fehler vorhanden sind.
Box aus dem Greifer nehmen, abstellen, lokalisieren
Wechseln Sie in ARC zum Bereich Flotte und drücken Sie auf das rote Robotersymbol. Drücken Sie dann die Schaltfläche "Fehler beheben".
Begeben Sie sich zum Roboter und drücken Sie den Not-Halt-Taster. Der Status des Not-Halt-Tasters sollte im ARC auf „Gedrückt“ wechseln. Drücken Sie dann 'Weiter'.

Öffnen Sie den Turm, indem Sie ihn vorsichtig nach rechts drehen. Drücken Sie dann 'Weiter'.
Entfernen Sie alle Boxen aus dem Greifer. Drücken Sie dann 'Weiter'.
Legen Sie die Boxen in das angegebene Quellenfach. Drücken Sie dann 'Weiter'.
Wenn der Greifer herausragt, drücken Sie ihn vorsichtig zurück in den Turm. Achten Sie bitte darauf keine Bauteile zu beschädigen. Drücken Sie dann 'Weiter'.

Wenn der Turm des Roboters geöffnet ist, schließen Sie ihn manuell. Drücken Sie dann 'Weiter'.
Lösen Sie den Not-Halt-Taster und drücken Sie den Drucktaster am Roboter. Der Status sollte in ARC auf „Gedrückt“ wechseln. Drücken Sie dann 'Weiter'.

Drücken Sie „Intervention abschließen“ und warten Sie, bis der Roboter neu startet. Überprüfen Sie, dass keine weiteren Fehler vorhanden sind.