
TORU 5.5 Betrieb
Betrieb
Allgemein
Der Roboter arbeitet im automatischen Modus. Sie erhält ihre Aufträge über das zentrale, auftragserzeugende System an der Verwendungsstelle. Wenn der Roboter einen Auftrag erhält, den er nicht ausführen kann, gibt er eine Fehlermeldung aus und bearbeitet den nächsten Auftrag.
Schließen des Turms
1) Aluminiumprofil, 2) Laserscanner
Wurde der Turm manuell verschoben, kann der normale Betrieb erst wieder aufgenommen werden, nachdem der Turm geschlossen wurde. Drehen Sie den Turm manuell, bis das Aluminiumprofil (1) auf den Laserscanner (2) zeigt.
Batterietrennschalter
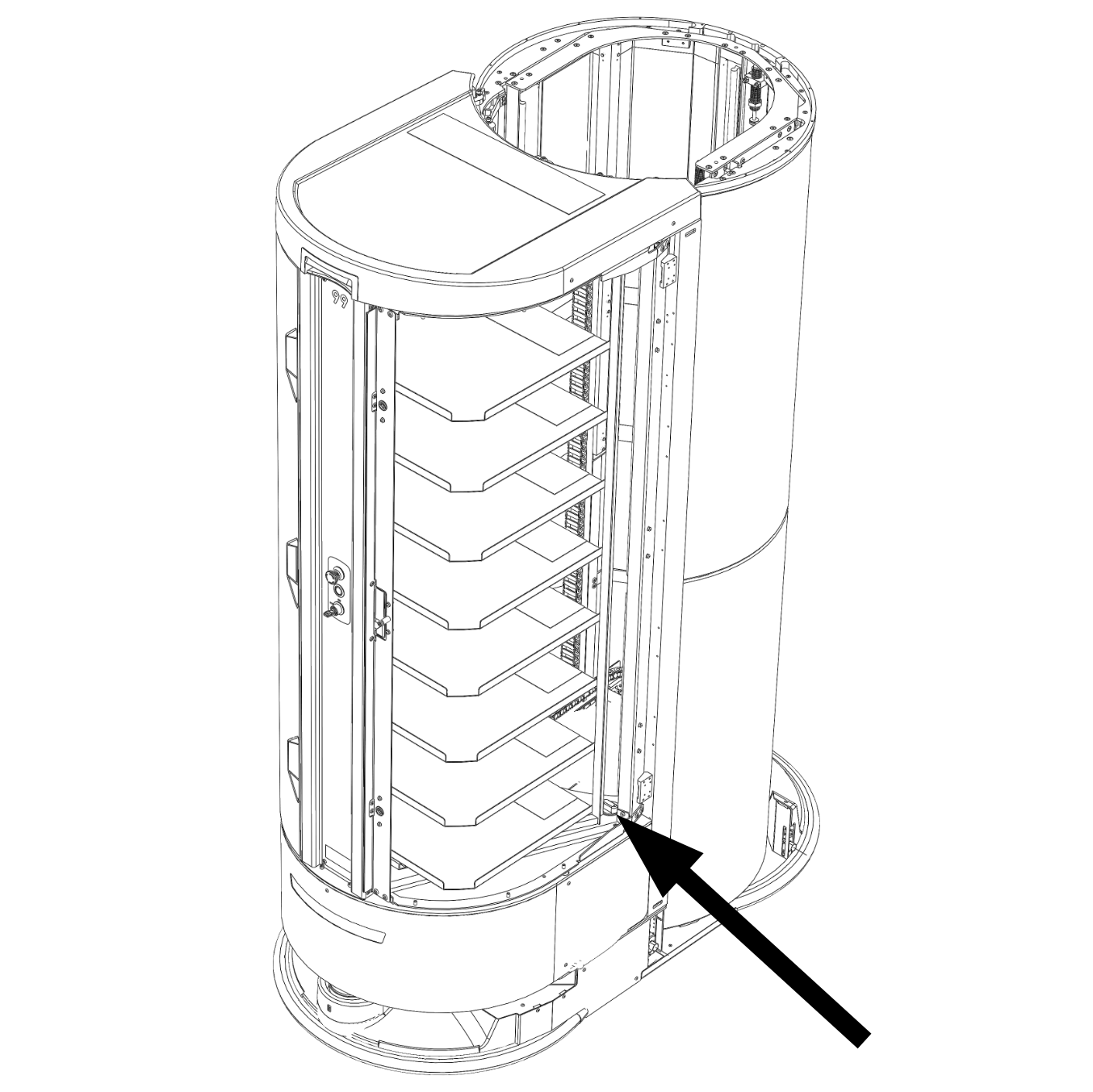
Position des Batterietrennschalters
Der Batterietrennschalter trennt die Batterie von allen elektrischen Komponenten.
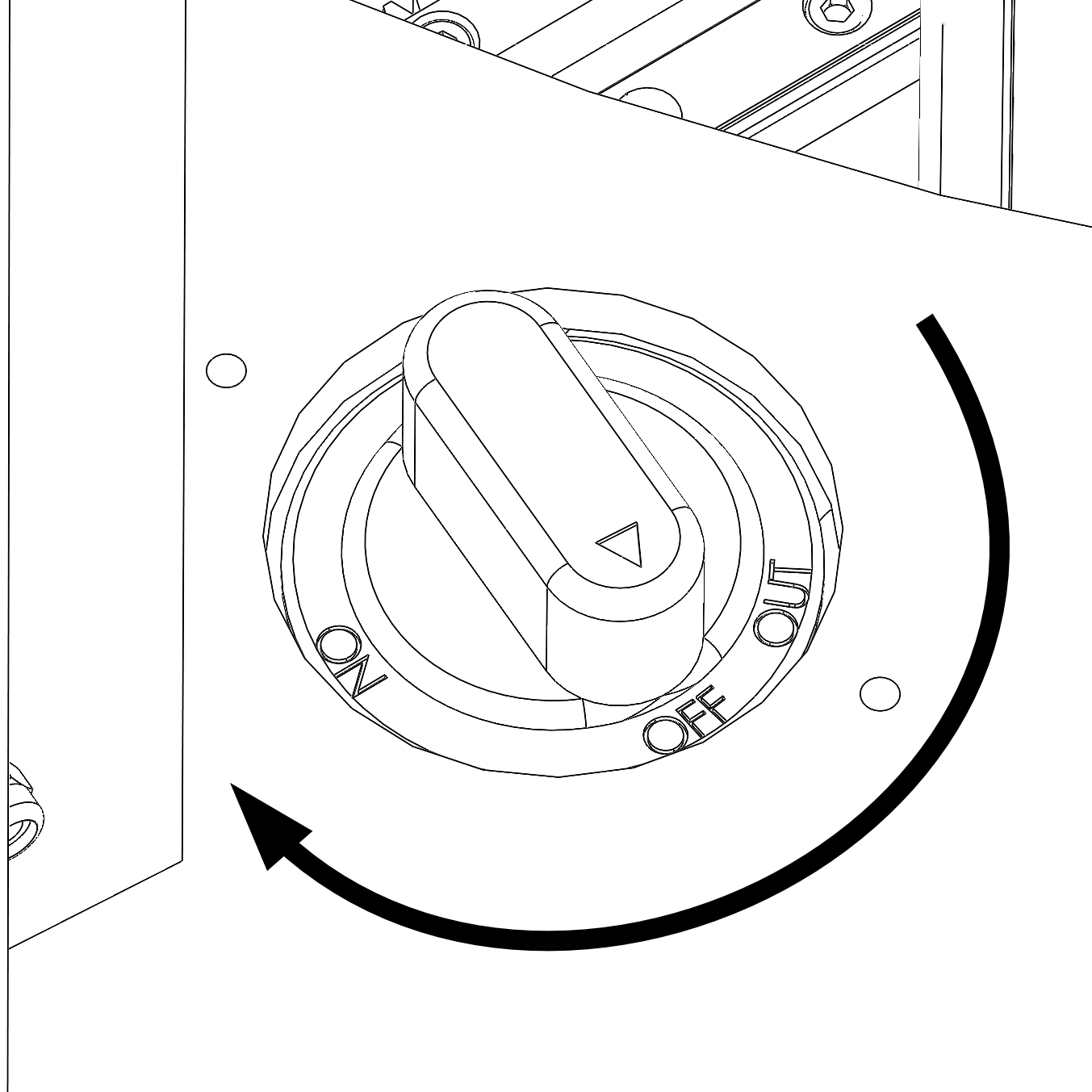
Betrieb
Drehen Sie den Batterietrennschalter im Uhrzeigersinn, um den Roboter mit Spannung zu versorgen. Drehen Sie den Schalter gegen den Uhrzeigersinn, um den Roboter von der Batteriespannung zu trennen. Der Schalter kann nach dem Trennen des Roboters von der Batteriespannung weiter gegen den Uhrzeigersinn gedreht und abgezogen werden.
Schalte den Roboter ein
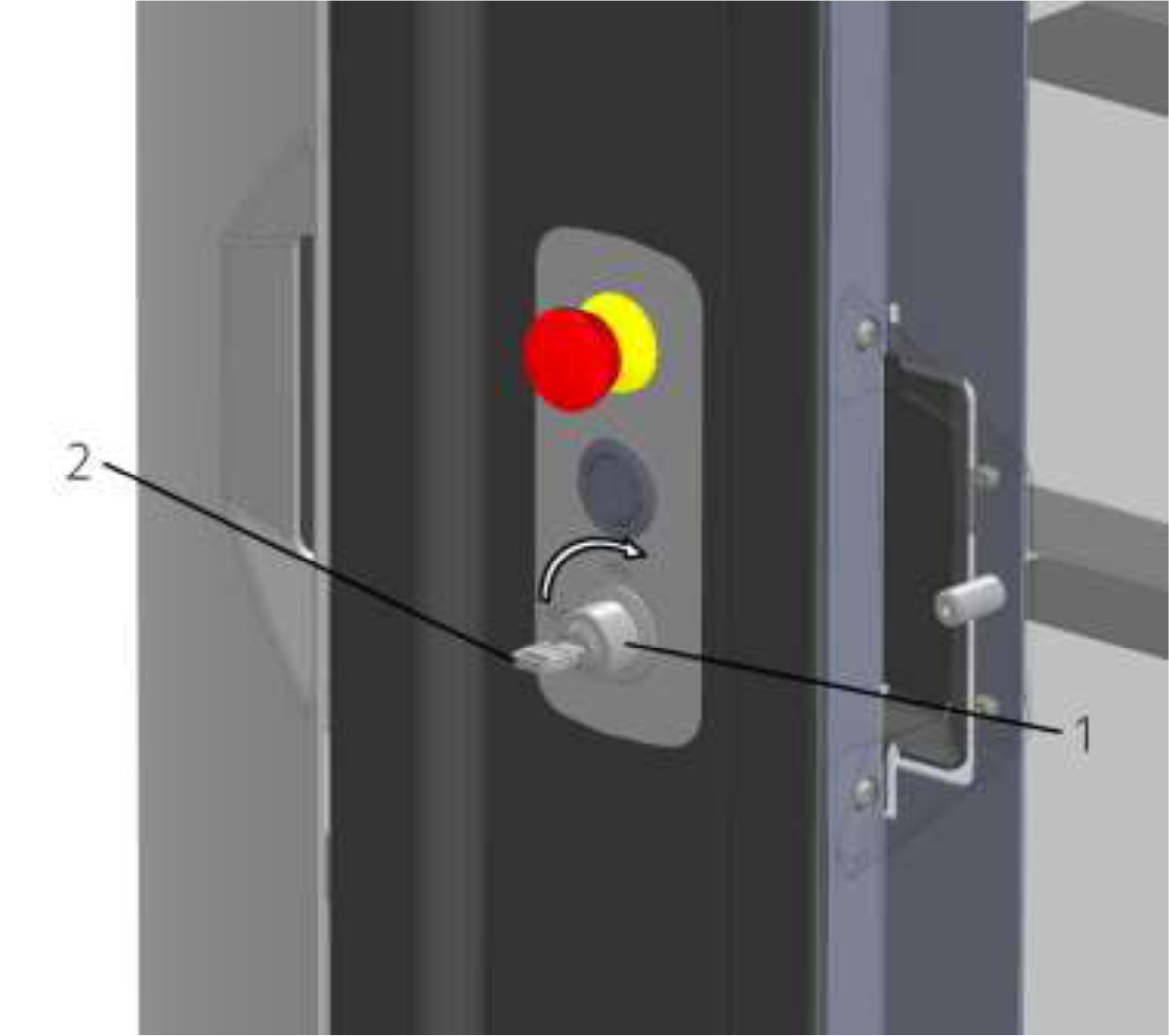
1) Schlüssel, 2) Schlüsselschalter
Der Schlüsselschalter dient als Hauptschalter der Maschine. Sie kann in beiden Positionen abgenommen werden, um zu verhindern, dass der Roboter ungewollt aus- oder eingeschaltet wird.
Voraussetzung:
Der Batterietrennschalter ist eingeschaltet.
Der Roboter ist ausgeschaltet.
Alle Not-Halt-Taster sind entriegelt.
Der Turm ist geschlossen.
Schlüssel vorhanden.
Ausführung:
Stecken Sie den Schlüssel (1) in den Schlüsselschalter (2).
Drehen Sie den Schlüssel im Uhrzeigersinn.
Der Roboter wird eingeschaltet und beginnt hochzufahren. Nachdem die Inbetriebnahme abgeschlossen ist, beginnt der Roboter mit seiner Arbeit.
Anhalten des Roboters
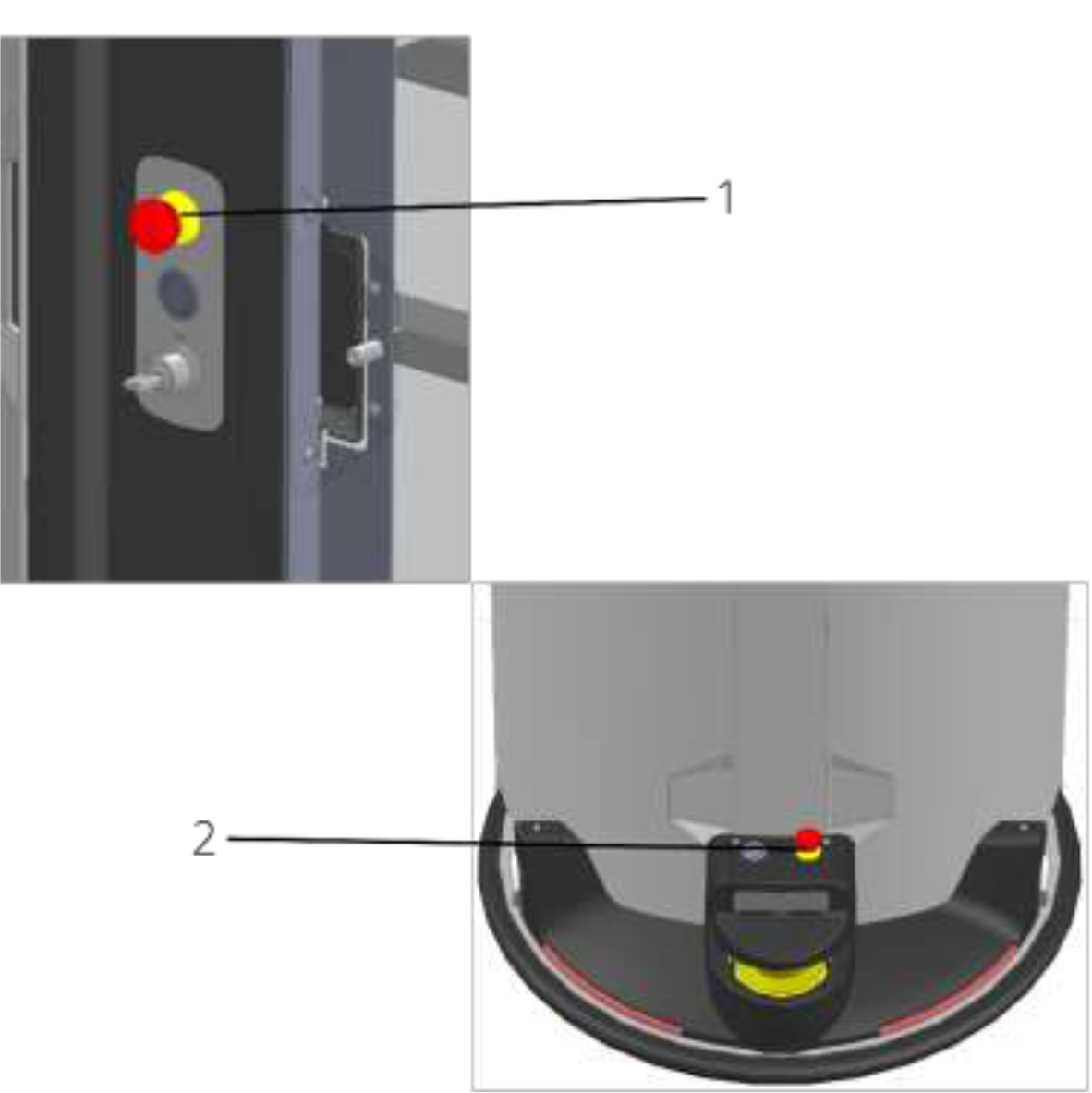
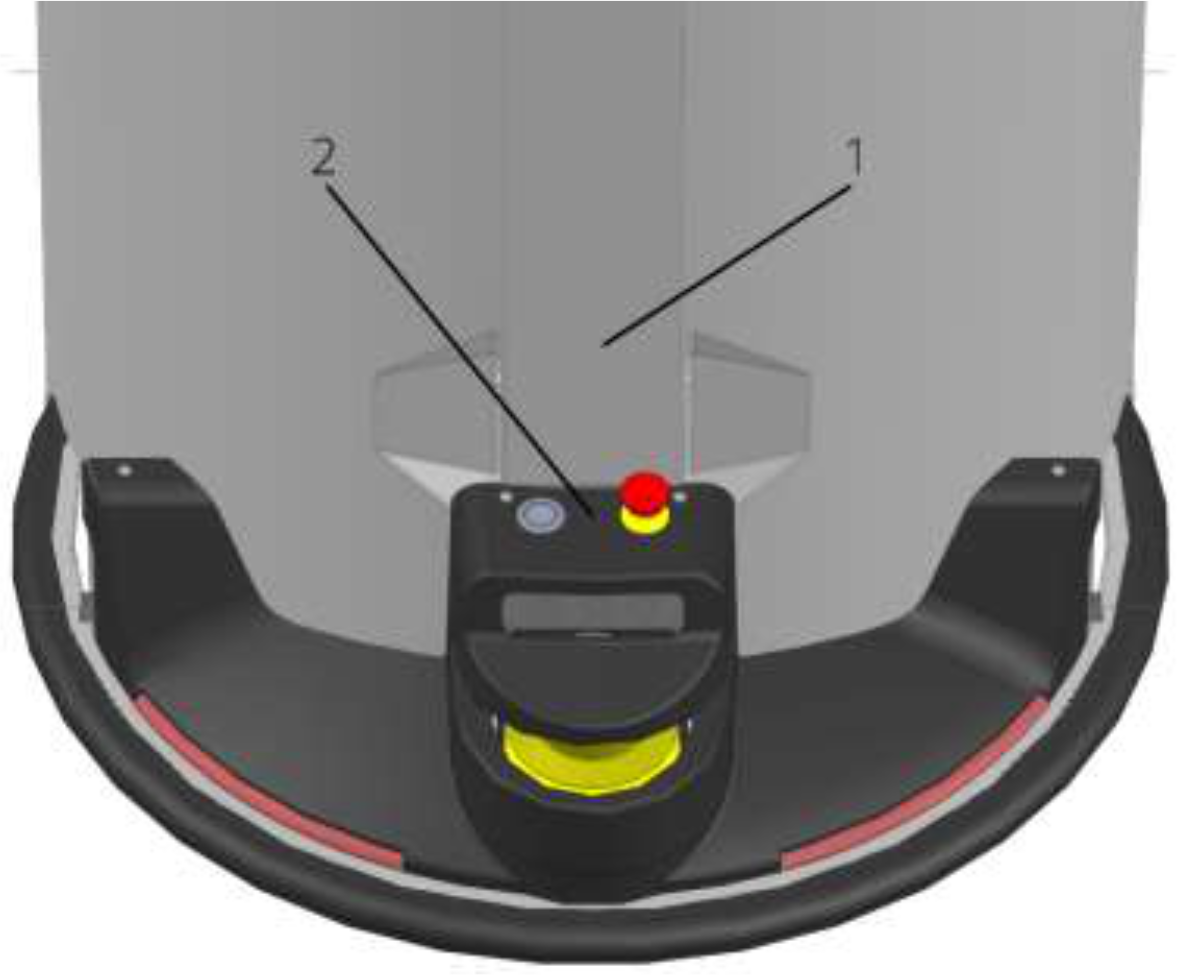
1) Not-Halt-Taster an der Rückseite, 2) Not-Halt-Taster an der Vorderseite
Der Roboter verfügt über zwei Not-Halt-Taster. In einer Gefahrensituation können alle gefährlichen Bewegungen durch Drücken einer Not-Halt-Taster gestoppt werden. Neben dem Anhalten des Roboters in einer Gefahrensituation dienen die Not-Halt-Taster auch dazu, gefahrlos am Roboter zu arbeiten.
 | Hinweis! Wird eine Not-Halt-Taster betätigt, blinken die vorderen und hinteren LED-Leisten rot. |
|---|
Not-Halt-Taster betätigen

1) Not-Halt-Taster
Drücken Sie den Ihnen am nächsten gelegenen Not-Halt-Taster.
Der Not-Halt-Taster wird betätigt und rastet ein. Alle gefährlichen Roboterbewegungen werden gestoppt. Am Roboter können Arbeiten durchgeführt werden.
Entriegeln Sie den Not-Halt-Taster
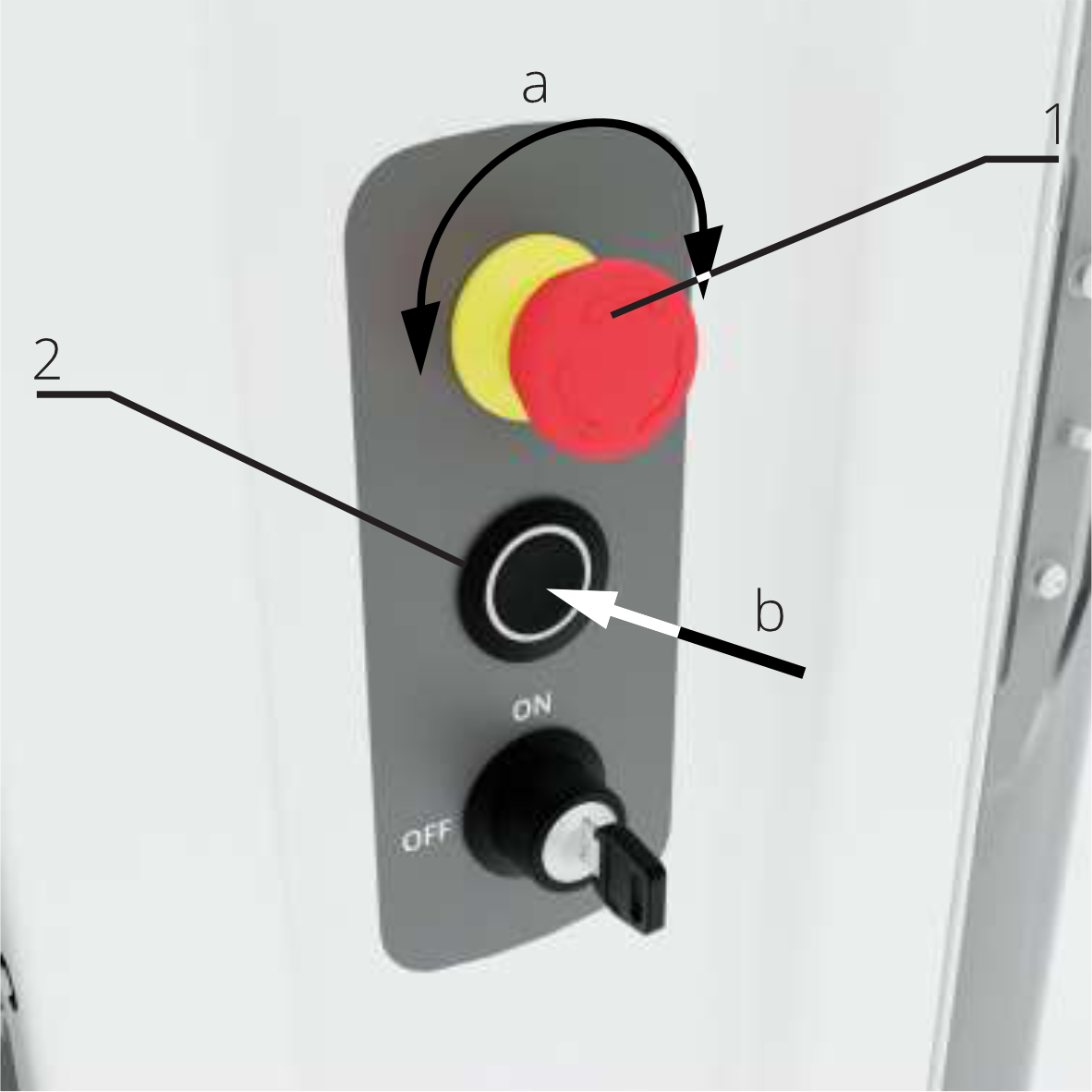
1) Not-Halt-Taster, 2) Reset Taster
Vergewissern Sie sich, dass das Entriegeln des Not-Halt-Tasters keine Gefahr darstellt.
Schließen Sie den Turm, wenn nötig (siehe „Schließen des Turms“).
Entriegeln Sie den Not-Halt-Taster (1), indem Sie ihn in eine beliebige Richtung drehen.
Drücken Sie die Drucktaste(2) zwei Sekunden lang.
Die Not-Halt-Taster ist entriegelt und der Roboter nimmt seine Arbeit wieder auf.
LED-Statusanzeige
Die LED-Leiste gibt Auskunft über den Status des Roboters.
Funktion | Lichtsignal |
|---|---|
Fahrtrichtungsanzeiger | 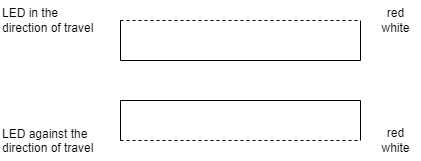 |
Not-Halt-Taster betätigt | 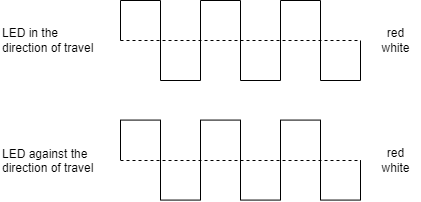 |
Roboter wird geladen | 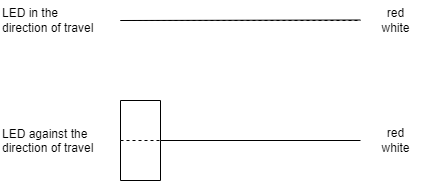 . . |
Störung | 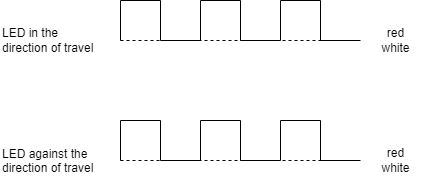 |