
TORU 5.5 Komponenten
Allgemeiner Überblick
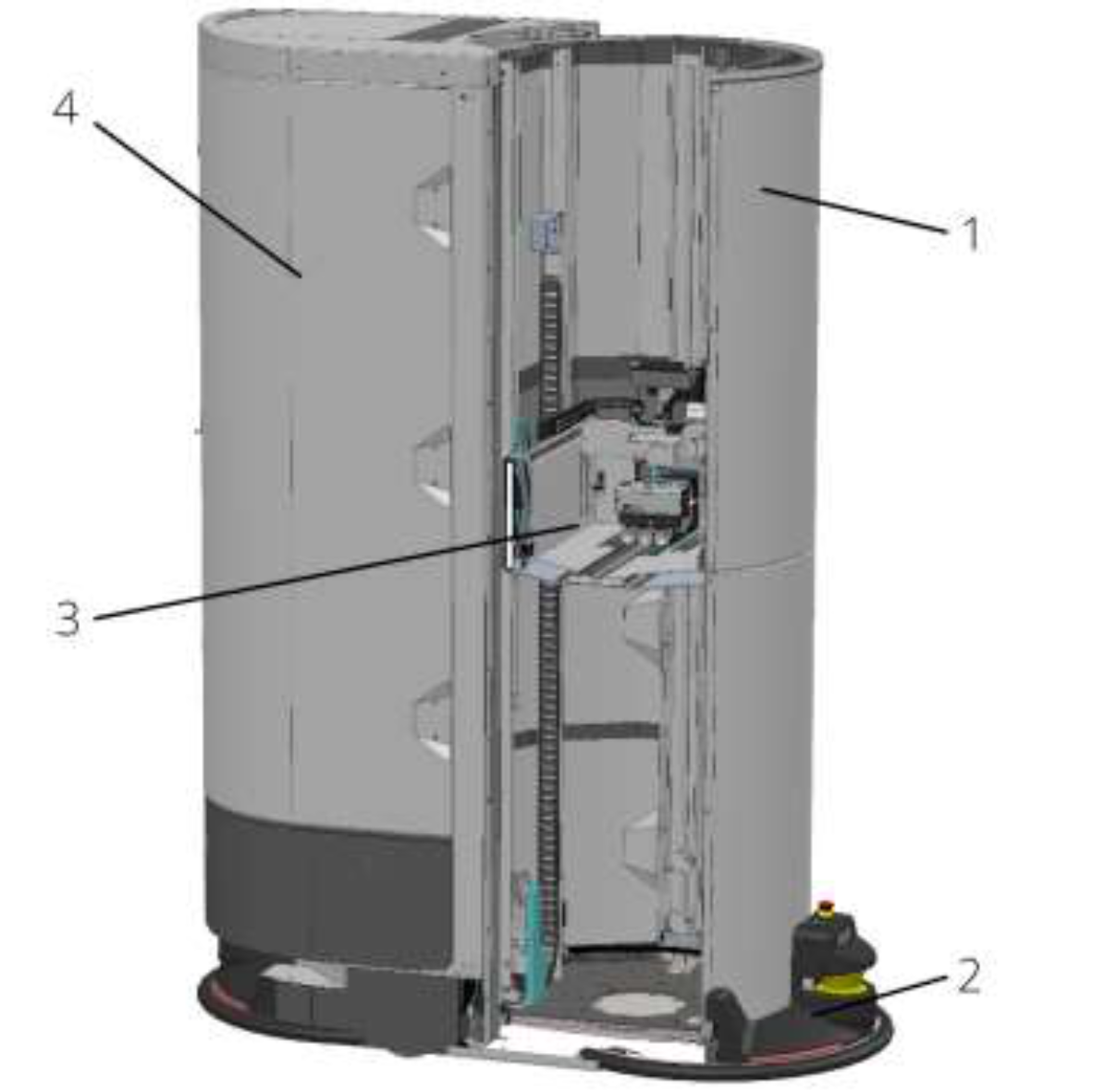
1) Turm, 2) Antriebseinheit, 3) Greifeinheit, 4) Rucksack
TORU 5.5 besteht im Wesentlichen aus vier Komponenten. Der Schuhboxgreifer (3) wird für die Handhabung der zu entnehmenden Objekte verwendet. Der Turm (1) schützt Personen vor gefährlichen Maschinenbewegungen. Die Fahrbasis (2) stellt den Kontakt zum Boden her. Das Rucksackregal (4) dient als Lager für die zu entnehmenden Gegenstände.
Schuhboxgreifer
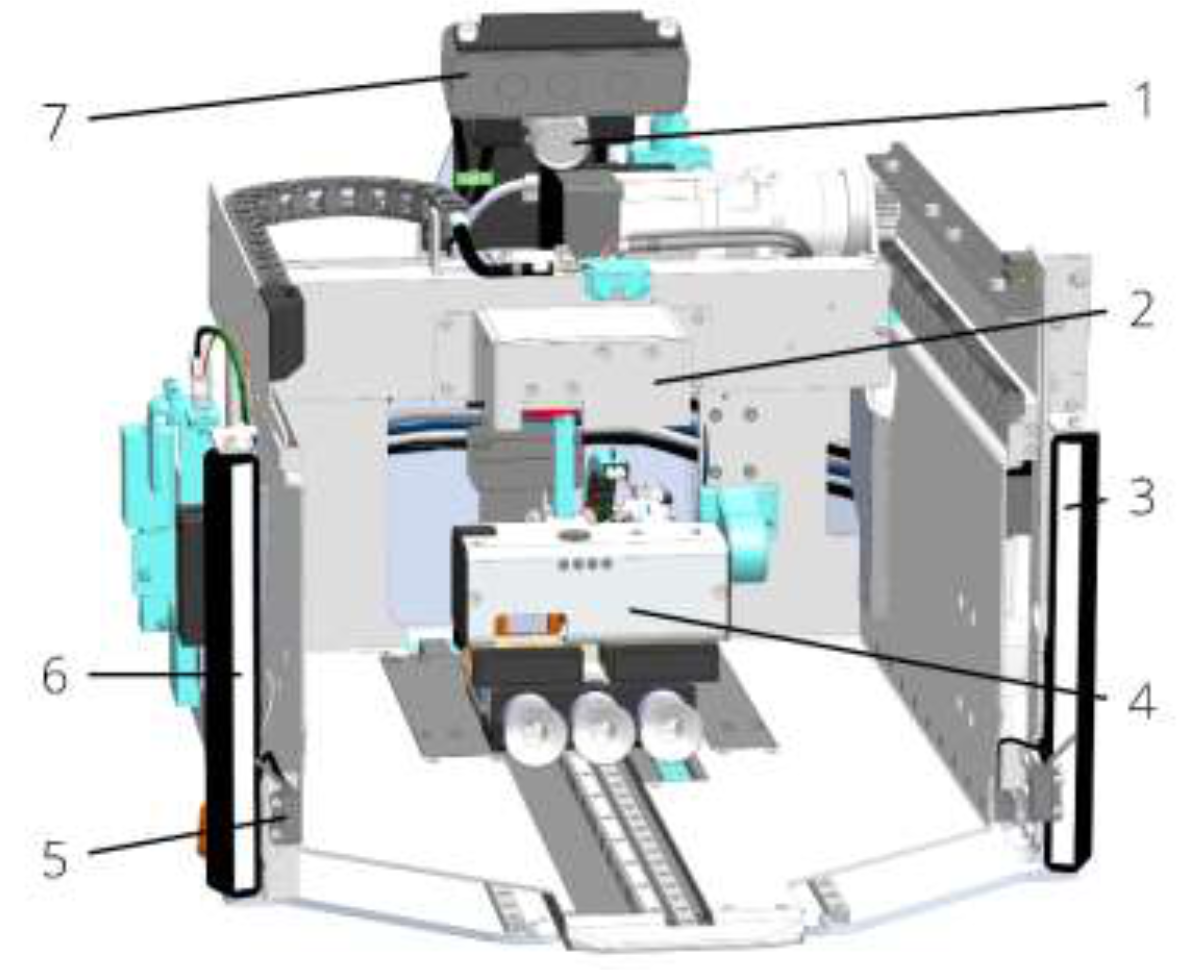
1) Barcodekamera, 2) Zurückschiebe-Einheit, 3) LED Blitzlicht links, 4) Vakuumeinheit, 5) Lichtschranke, 6) LED Blitzlicht rechts, 7) 3D-Kamera
Der Schuhboxgreifer interagiert mit den zu pickenden Objekten. Die 3D-Kamera ermöglicht es dem Greifer, die Position, Größe und Ausrichtung der Objekte im Kommissionierregal zu erkennen. Die Barcode-Kamera wird verwendet, um Barcodes auf dem Schuhkarton zu erkennen. Dank der Pushback-Einheit können die Schuhkartons nach dem Greifen eines Stapels von Kartons in das Kommissionierregal über den untersten Karton zurückgeschoben werden.
Verkleidung front
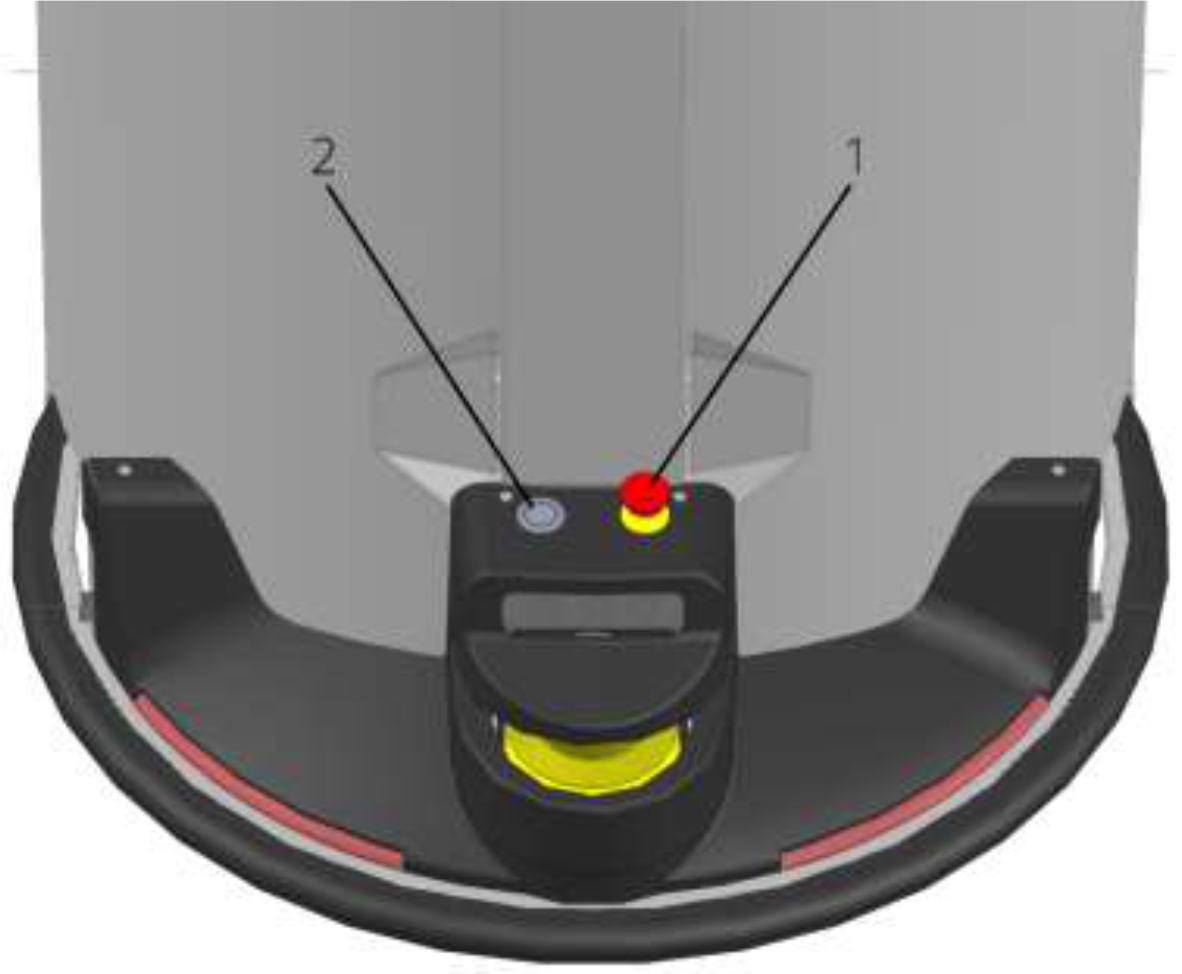
1) Not-Halt-Taster, 2) Druckknopf
Die vordere Verkleidung schützt das Innere des Roboters. An ihm sind ein Not-Halt-Taster (1) und ein Reset Taster (2) angebracht.
Turm

1) Turm innen, 2) Turm außen
Der Turm besteht aus zwei Teilen, dem inneren Turm (1) und dem äußeren Turm (2). Der äußere Turm schützt Personen davor, bewegliche Maschinenteile zu erreichen. Der innere Turm fährt mit dem Greifer aus, wenn der Turm teleskopiert wird. Der Turm kann gedreht werden und öffnet sich nur in Richtung des Gestells.
Rucksackregal
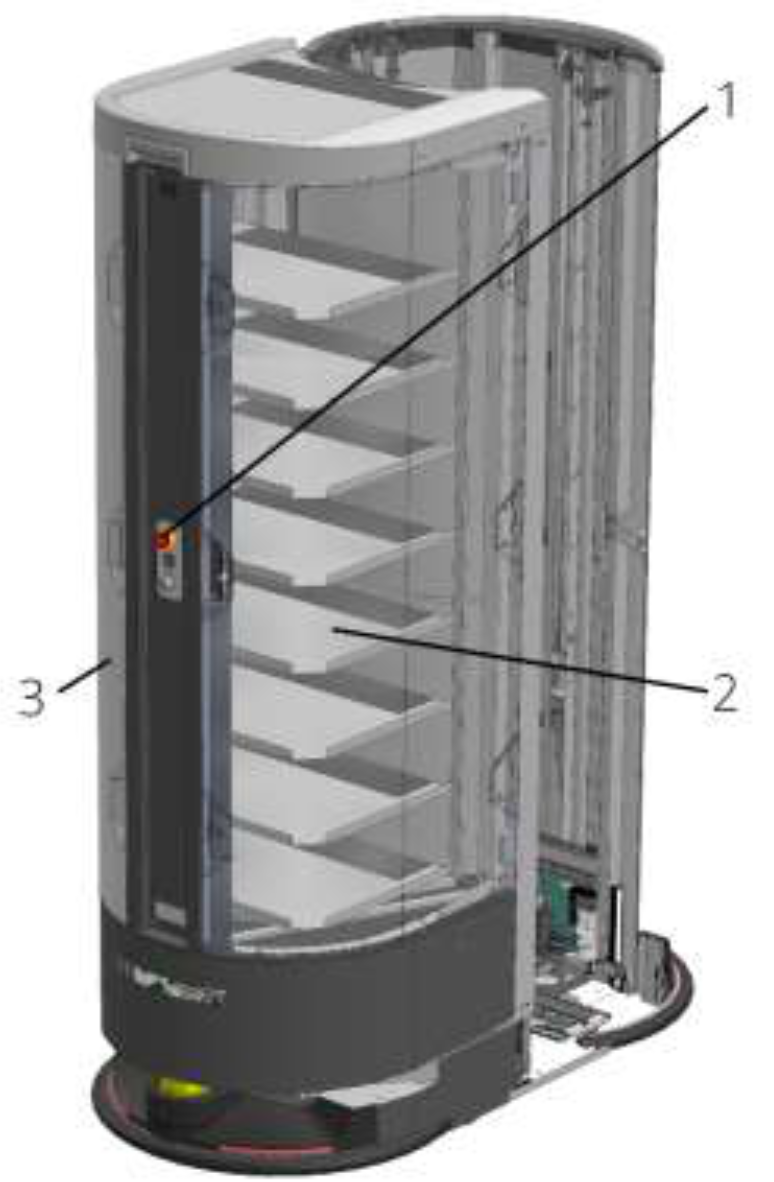
1) Bedienfeld, 2) Rucksacktür, 3) Rechte Seitenwand
Das Rucksackregal dient als Aufbewahrung für die gegriffenen Boxen. Das Bedienfeld (1) befindet sich in der Mitte des Rucksackregals. Die Rucksackregal-Tür und die Abdeckung (2, 3) schützen Personen vor dem Zugriff auf bewegliche Maschinenteile. Sie sind verschraubt und können für Wartungsarbeiten und Prozessbeobachtungen demontiert werden.
Bedienfeld
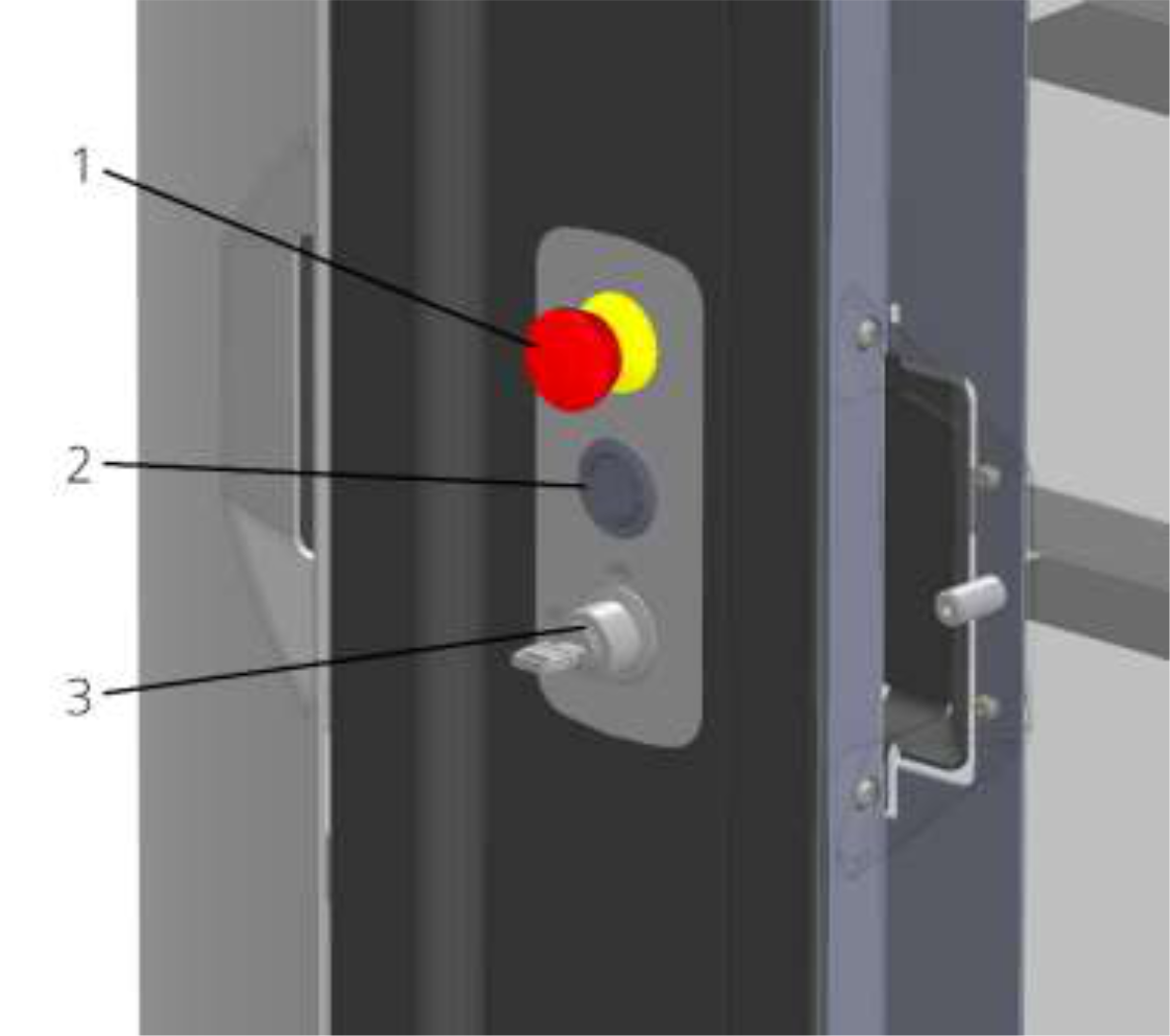
1) Not-Halt-Taster, 2) Reset Taster, 3) Schlüsselschalter
Das Bedienfeld besteht aus drei Elementen. Durch Drücken des Not-Halt-Taster (1) werden alle gefährlichen Bewegungen des Roboters gestoppt. Der Reset Taster (2) dient dazu, den Roboter nach einem Nothalt wieder in den Normalbetrieb zu bringen. Mit dem Schlüsselschalter (3) kann der Roboter ein- und ausgeschaltet werden.
Fahrbasis
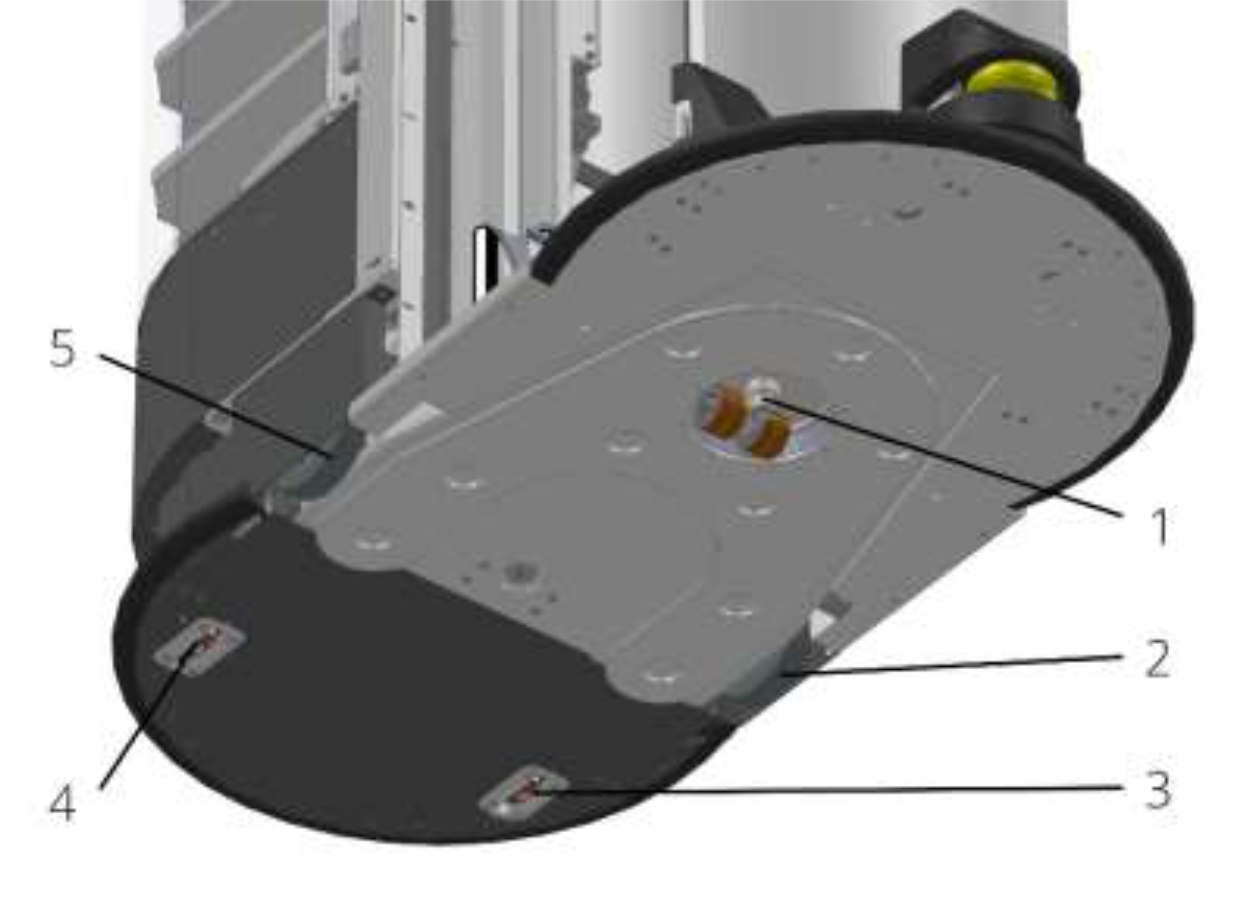
1) Lenkrad, 2) Antriebsrad links, 3) Ladekontakt links, 4) Ladekontakt rechts, 5) Antriebsrad rechts
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Warnung! Laserklasse 1 nach DIN EN 60825-1:2003-10. Alle verwendeten Sensoren haben höchstens Laserklasse 1. |
|---|
Die Fahrbasis kommt mit dem Boden in Berührung. Er ist mit Sicherheitsvorrichtungen und Sensoren ausgestattet, um die Umgebung des Roboters zu erfassen. Der Industrie-PC steuert den Roboter, während die Sicherheitssteuerung gefährliche Bewegungen des Roboters verhindert.
Ladestation

Die Ladestation wird zum Aufladen der Akkus des Roboters verwendet. Die Ladestation wird vom Roboter im Normalbetrieb automatisch angefahren. Ein deaktivierter Roboter kann manuell zur Ladestation geschoben werden (siehe „Manuelles Aufladen des Roboters“).
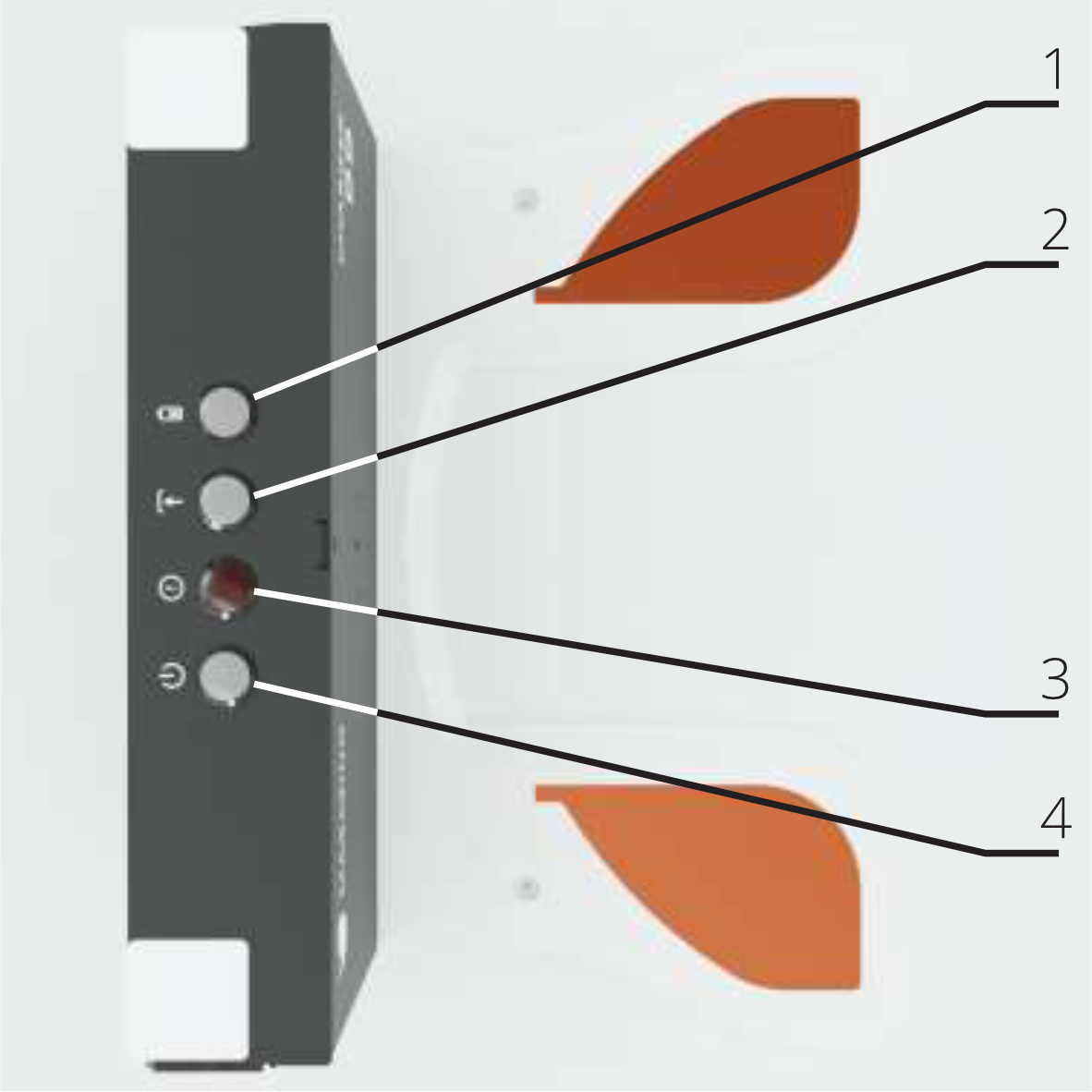
1) Ladezustand, 2) Andockzustand, 3) Fehlererkennung, 4) Stromversorgungszustand.
Die Ladestation hat vier LEDs über der Ladestation. Die einzelnen LEDs und das Zusammenspiel mehrerer LEDs geben Rückmeldung über den aktuellen Zustand der Ladestation und den Ladevorgang.
Fehlersuche an der Ladestation
 | Bedeutung |
 | Die Ladestation ist ausgeschaltet.
|
 | Die Ladestation wird in Betrieb genommen.
|
 | Die Ladestation hat einen Fehler festgestellt.
|
 | Ein Roboter wurde erkannt, befindet sich aber noch nicht in der Ladeposition. Ändern Sie die Position des Roboters, bis die Ladeposition erkannt wurde. |
 | Der Roboter wird aufgeladen. |
 | Der Roboter ist vollständig aufgeladen. |
Piktogramm | Bedeutung | Piktogramm | Bedeutung | ||
|---|---|---|---|---|---|
 | Die LED leuchtet nicht. |  | LED blinkt | ||
 | LED leuchtet. |  | LED blinkt | ||
Montage der Ladestation
1) Wand
Die Ladestationen müssen fest mit dem Boden verschraubt werden. Die Löcher für die Montage müssen wie oben gezeigt vorbereitet werden.
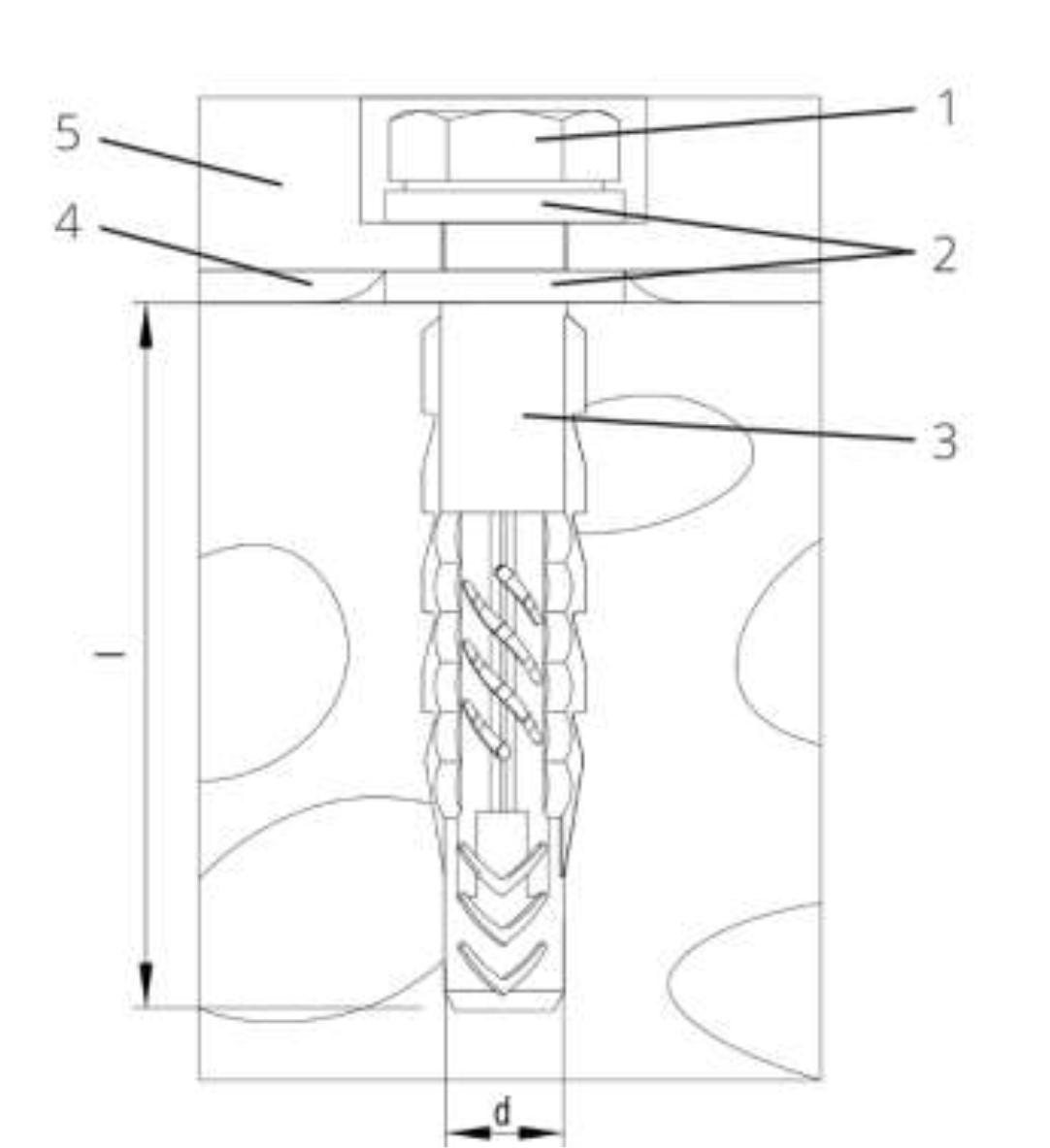
1) Sechskantschraube (d = 6 mm, l ≥ 30 mm), 2) Unterlegscheibe, 3) Dübel, 4) Moosgummimatte, 5) Grundplatte der Ladestation