
General
 | Notice! The A-weighted emission sound pressure level of the robot is less than 70 dB(A). |
|---|
Intended use
The intended use is limited exclusively to the information in these operating instructions. Any use that deviates from the information in these operating instructions is considered improper use and can lead to the loss of the operating permit.
The following is considered to be intended use:
Operation in an industrial environment with restricted access for untrained personnel.
Autonomous driving at fast and safe speeds.
Autonomous gripping, storing and depositing of load carriers with a total weight of up to 20 kg.
Manual manipulation of the gripper when the emergency stop button is activated to resolve a malfunction.
Operation, maintenance, and servicing by trained personnel.
Unintended use shall be deemed to include, but not be limited to:
Operation outside an industrial environment.
Operation in an industrial environment without access restrictions for untrained personnel.
Operation near stairs, ramps, and pits that are not sufficiently secured against the robot falling.
Operation on floors that do not meet the requirements for safe operation.
Operation in a potentially explosive area.
Transport of load carriers with a total weight of more than 20 kg.
Transport of people and animals.
Operation, maintenance, and servicing by untrained personnel.
Modifications of any kind to hardware and software that have not been approved in writing by Magazino.
Manual work on the machine without activating the emergency stop button.
Requirements for the working environment
The robot navigates autonomously. Autonomous navigation places particular demands on the working environment.
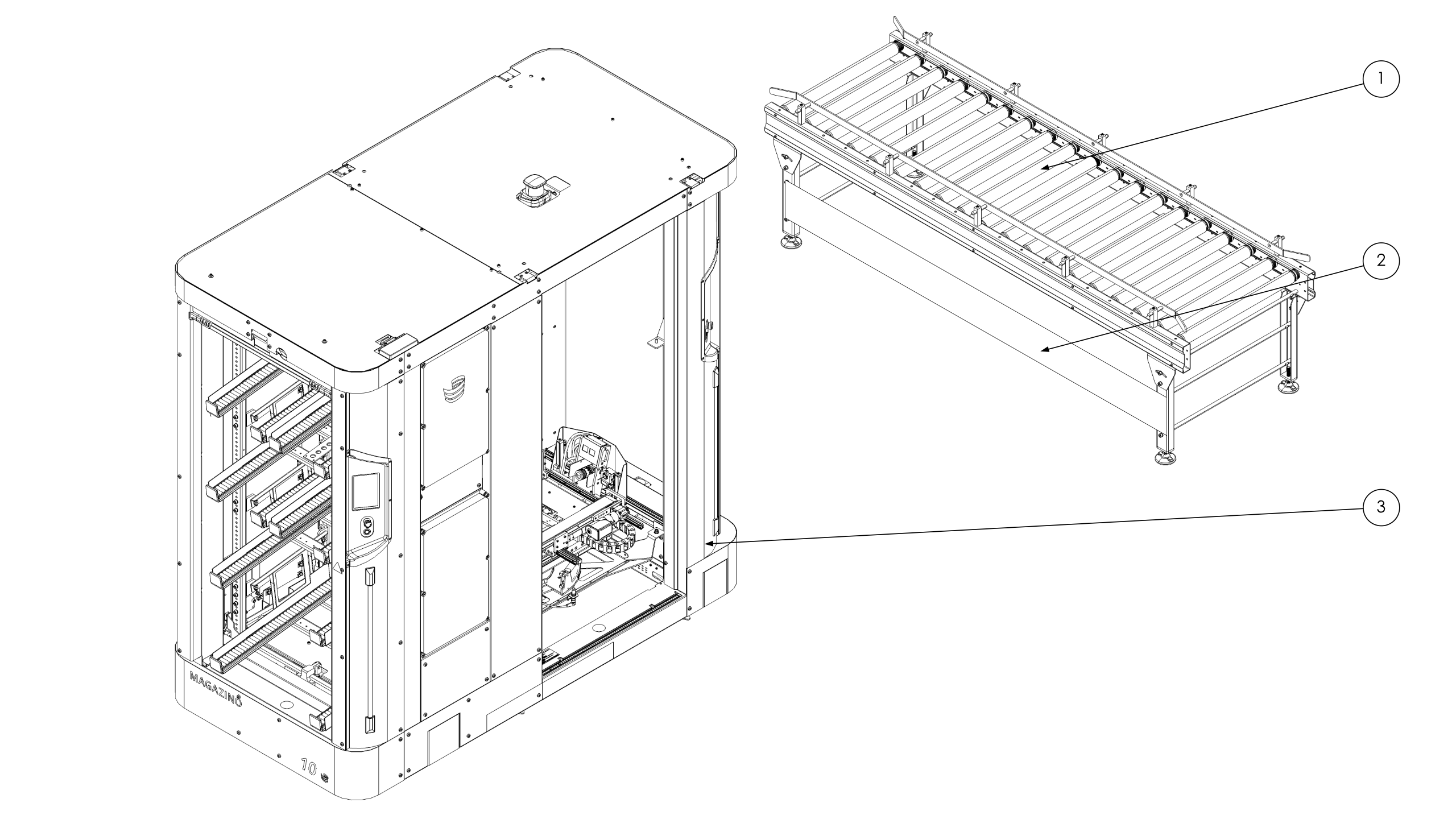
ITEM NO. | DESCRIPTION |
1 | Obstacle above laser level |
2 | sheet metal at laser level |
3 | SOTO 2.1.1 |
All structures and obstacles that SOTO may collide with and that are above or below the laser level (12 cm) must be represented at the height of the laser, for example by sheet metal, so that the robot can recognize them safely.
The floor must have the following properties:
Free from obstacles and impurities that deteriorate the properties of the floor.
Complies with the necessary guidelines of the VDMA.
Has sufficient load-bearing capacity for safe operation of the robot (maximum robot weight up to 1000 kg).
Level, horizontal and even, according to DIN 18202 and DIN 15185.
Mechanically resistant to abrasion.
Mechanically resistant to deformation.
Floor markings in all operating hazard zones, especially at handover stations and charging stations.
.png?inst-v=f4298025-0332-4f6d-9973-f1558a9c6c26) | Warning! Danger of accident! Significant changes in the properties of the floor after commissioning can lead to accidents. Contact Magazino if the properties of the floor change significantly. Adjustments to the maximum speed may be necessary. |
|---|
The working environment of the robot must have the following characteristics:
Average ambient temperature, continuous operation: +22 °C.
Maximum ambient temperature: +35 °C.
Lowest ambient temperature: +10 °C.
Maximum humidity: 95%, non-condensing.
Altitude: up to 1 000 m.
Requirements for the operator
The robot has been designed according to the state of the art to ensure maximum safety. However, in addition to a safe design, the decisive factor for safe operation is also compliance with basic regulations and behavior, which must be communicated and followed by the operator. The operator is any natural or legal person on whose behalf the robot is used.
The requirements for the operator are:
Documented trainings of the personnel who come into contact with the robot regularly.
Compliance with accident prevention regulations.
Keeping the working area of the robot clean.
Ensuring that the robot is used exclusively for its intended purpose.
Ensuring that personnel who come into contact with the robot have read and understood the robot operating manual.
Carrying out and documenting the periodic inspections and cleaning tasks.
Requirements for maintenance
Maintenance of the robots is performed according to an agreed schedule. The working environment must meet the following spatial and property requirements to allow service technicians to complete these procedures.
Tests | Requirements | Examples |
|---|---|---|
Braking tests |
| An aisle in the production that has been closed off for braking tests. 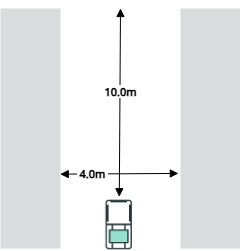 |
Bluespot check | 4m free space in front and rear of SOTO | Usually this can be done in a regular aisle if SOTO can be stopped for a few minutes 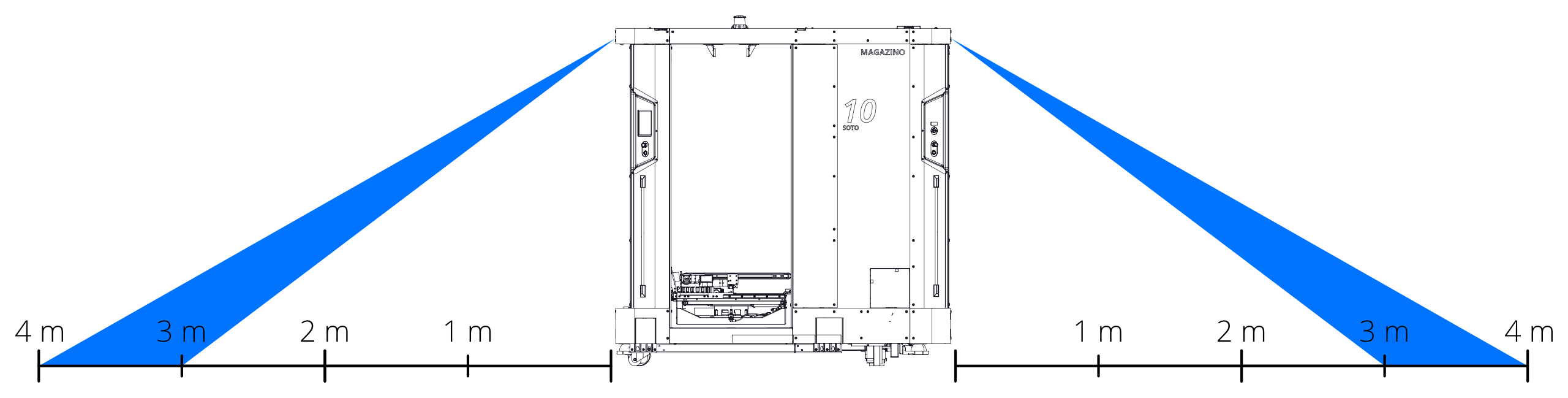 |
Laser scanners yaw alignment check |
|  |
Bottom Laser scanner pitch / roll | 3x Patterns need to be placed at 2.5m distance from the robot on the ground (one in front, one on left and one of right of the respective laser scanner) | 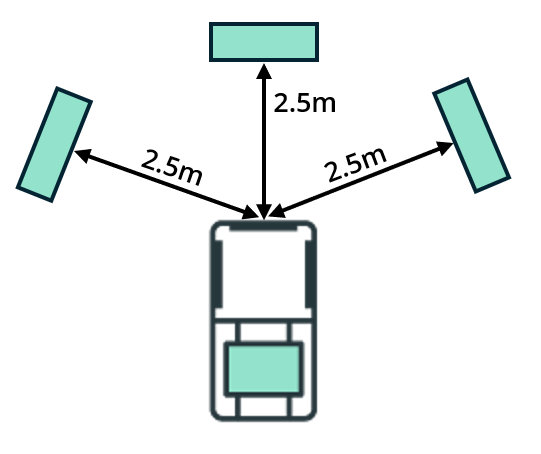 |
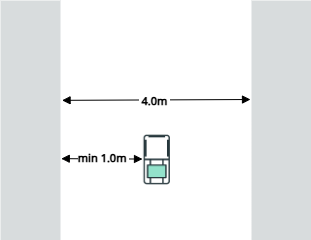
General space around the robot | SOTO footprint 2146 × 1060 mm + 1m to each side = ca. 4.2m x 3.2m | 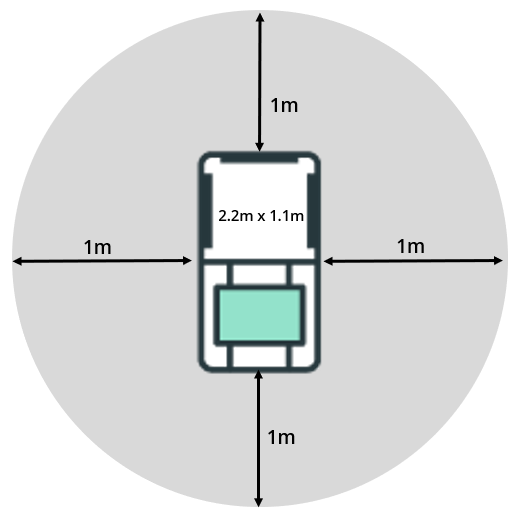 |
Optional | ||
Power socket for laptop and vacuum cleaner | 230V |
Personnel
To use the robot as intended, personnel must be trained.
Trained personnel
Analogous to DIN VDE 0105-100: A trained/instructed person is a person who has been instructed and, if necessary, trained about the tasks assigned to him/her and the possible hazards in case of improper behavior. He/she has also been instructed about the necessary protective equipment and protective measures. Personnel to be trained, instructed or undergoing general training may only work under the constant supervision of an experienced person.
In certain situations, activities must be carried out that go beyond intended use. These activities may only be performed by a skilled person.
Skilled person
Analogous to DIN VDE 0105-100: A skilled person is a person who, on the basis of his technical training, knowledge and experience, can assess the work assigned to him and recognize possible hazards. Furthermore, he has knowledge of the relevant regulations.
Zones
Operating zone
Industrial trucks - Safety requirements and verification - Part 4: Driverless industrial trucks and their systems (ISO 3691-4:2023):
“A minimum clearance of 0,5 m wide for a height of 2,1 m shall be provided on both sides of the path. This shall be measured between the path and adjacent fixed structures along the path.”
Operating hazard zone
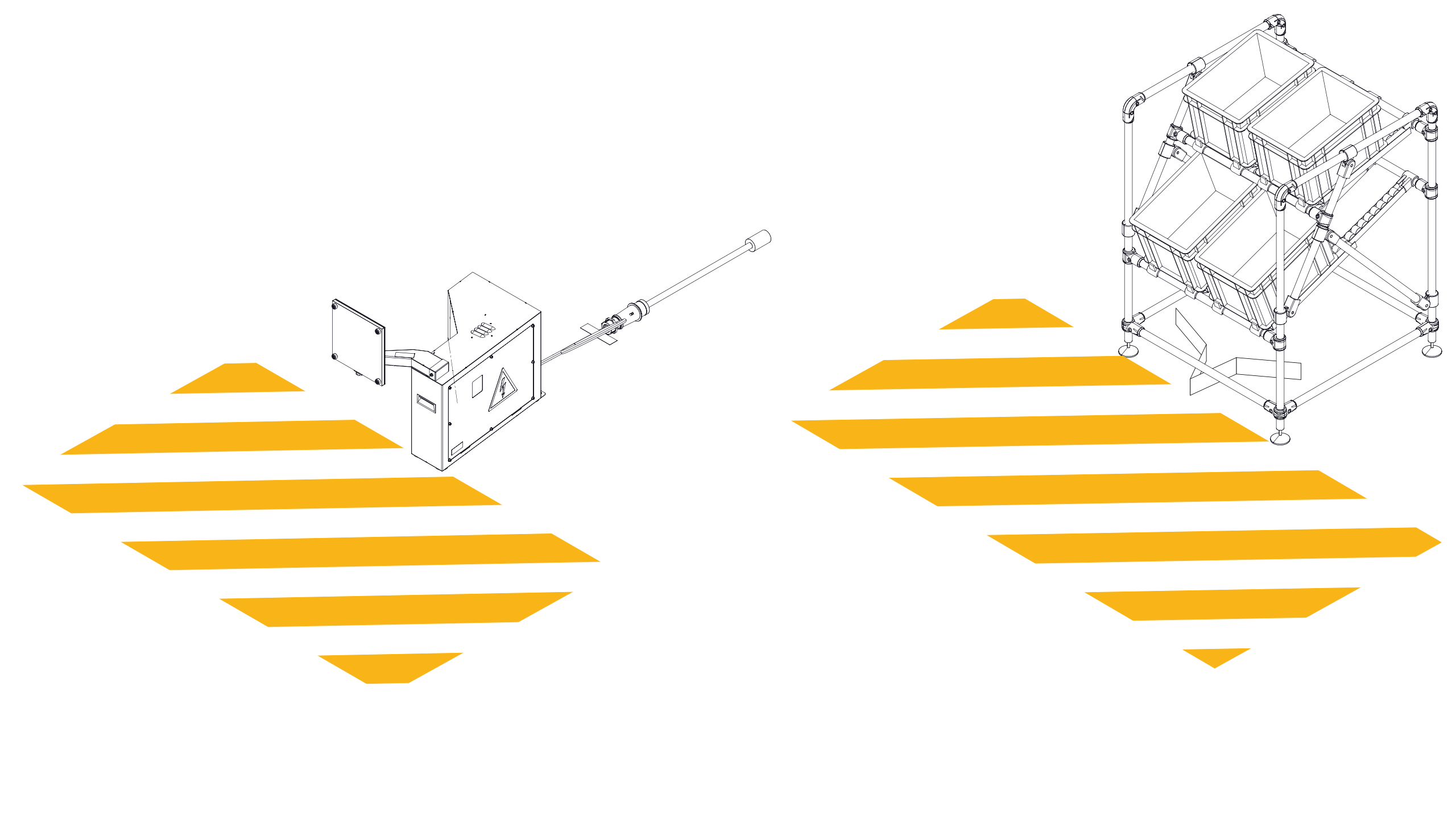
Example of a floor marking in front of the charger and the handover station
Industrial trucks - Safety requirements and verification - Part 4: Driverless industrial trucks and their systems (ISO 3691-4:2023):
"A zone of inadequate clearance (see A.2.1) or a zone which cannot be protected by personnel detection means shall be designated "operating hazard zone" (see Table A.1 and Table A.2) and marked accordingly. An operating hazard zone shall be clearly indicated by suitable signs or preferably floor/ ground markings. Confusion with other markings and signs shall be avoided. In this operating hazard zone, the truck speed shall be in accordance with Table A.1 and Table A.2 and the truck shall emit additional acoustical and/or optical warnings. If there is inadequate clearance and no pedestrian escape route of at least 0,5 m wide and 2,1 m high (see Table A.1 and Tables A.2, C.1, C.2 and C.3 clearance dimensions), then personnel detection means shall be active to ensure detection of persons to within 180 mm between edge of safety fields of ESPE and surrounding objects in order to check this zone is free of persons (e.g. block storages).”