ARC Tutorial "Overcurrent while putting down in backpack"
Description | Remove all items from the backpack. Usually triggered after a collision inside the backpack in job phase |
Link | |
Video | N/A |
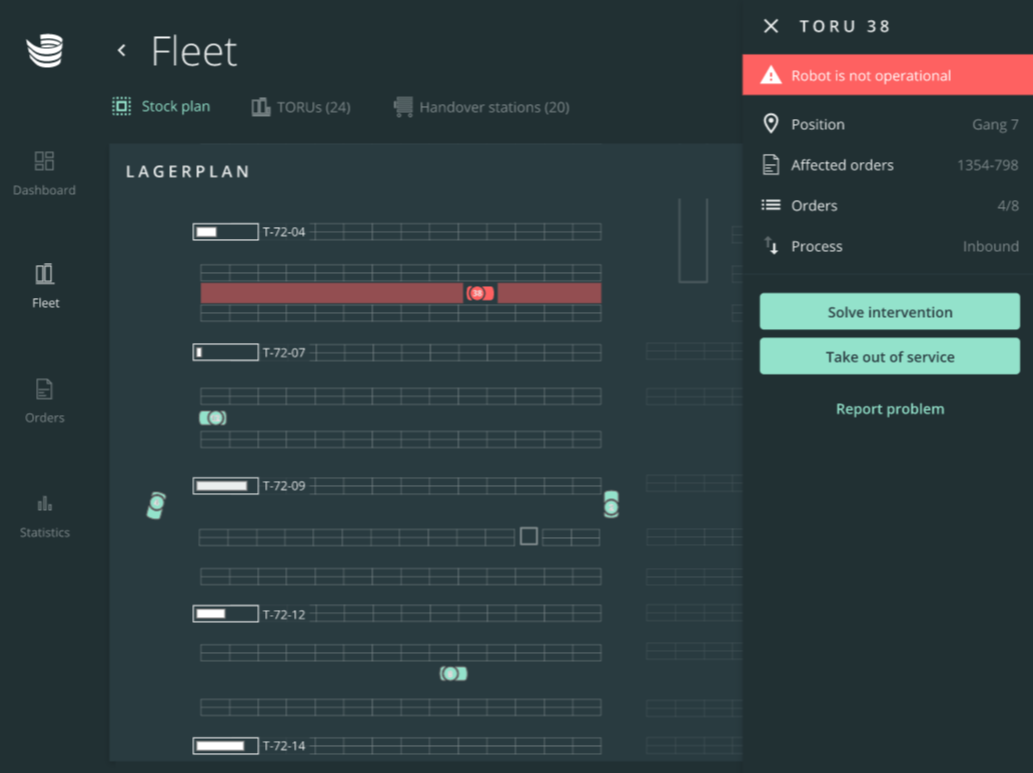
Navigate to the Fleet section and click on the red colored robot icon. Press ‘Solve intervention’ in the right-hand panel.
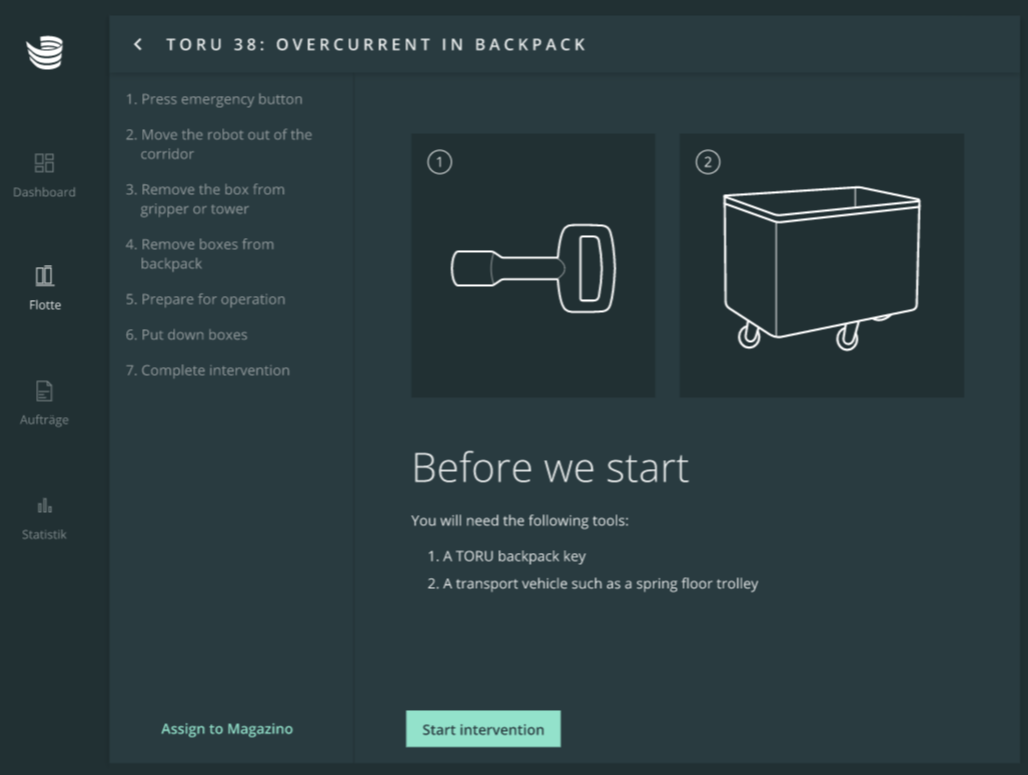
Make sure you have a TORU backpack key and a transport vehicle (such as a spring floor trolley) before proceeding.
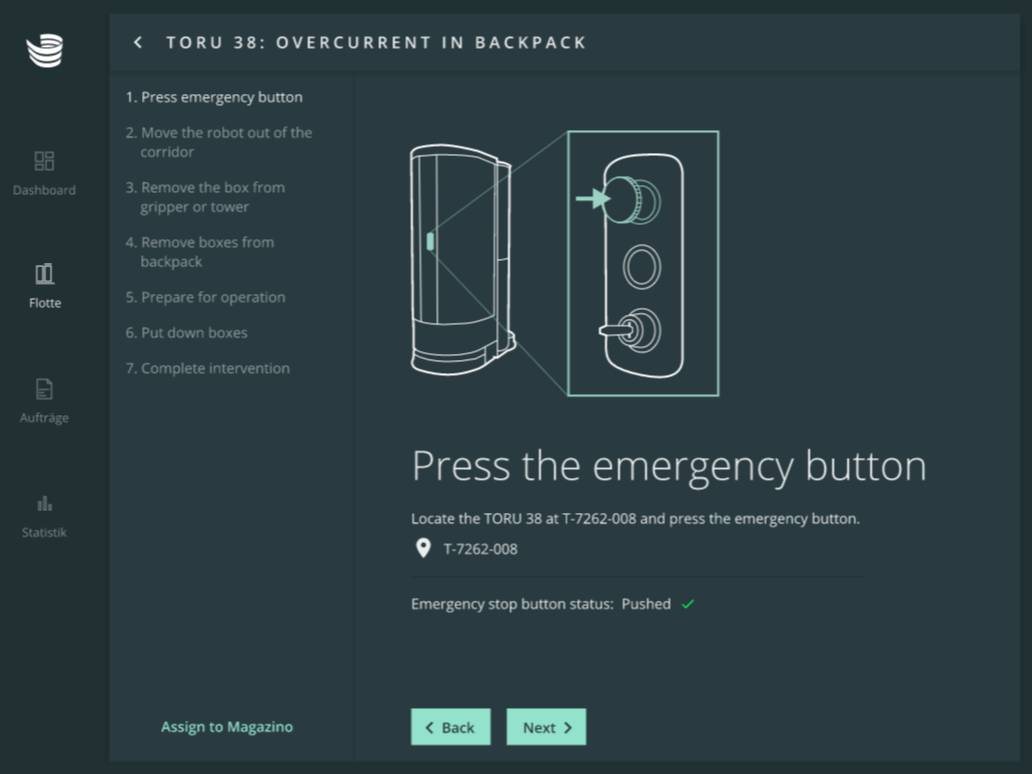
Press the emergency button on the robot.
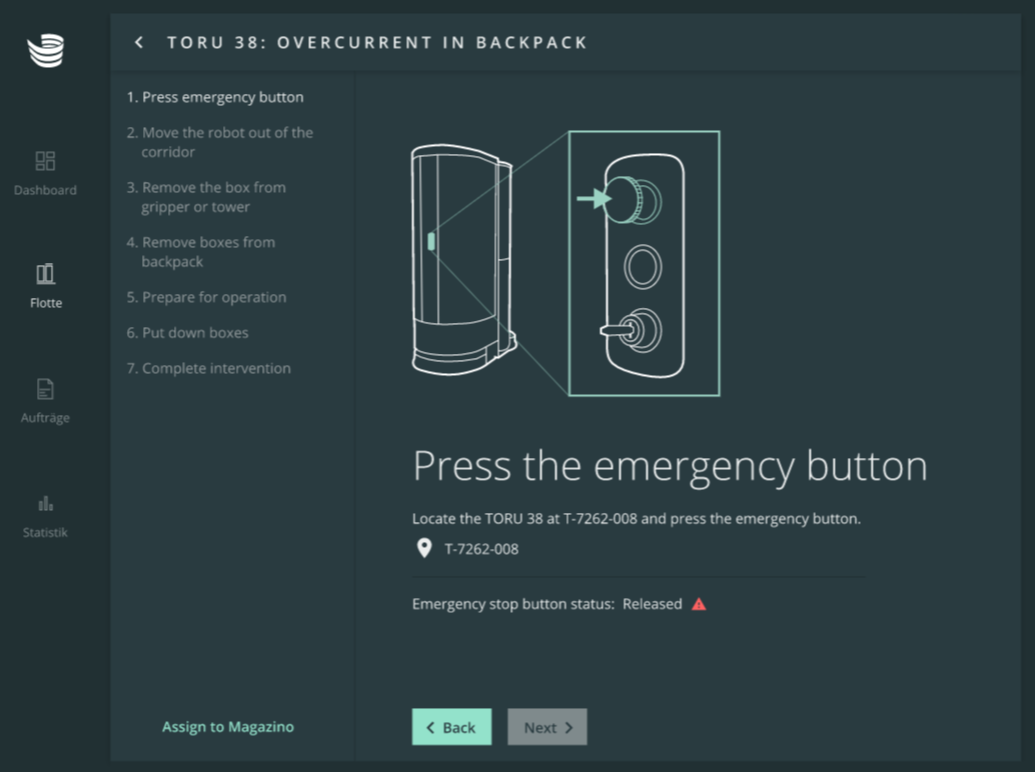
The emergency stop button status should change to “Pushed” in ARC. Then press ‘Next’.
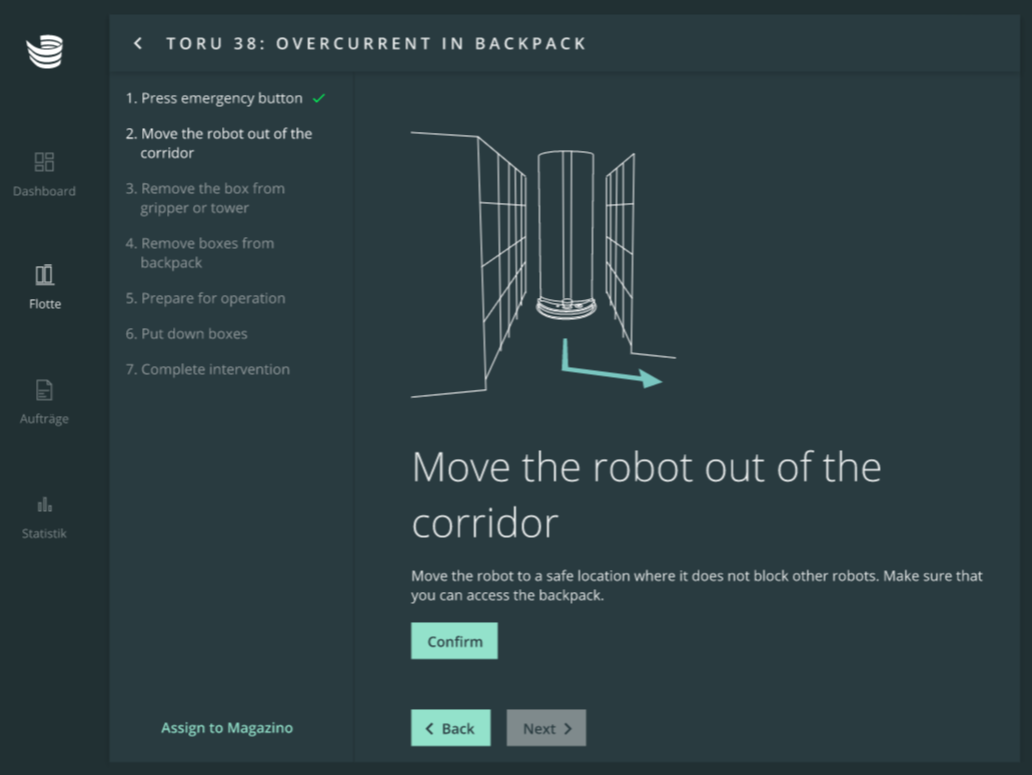
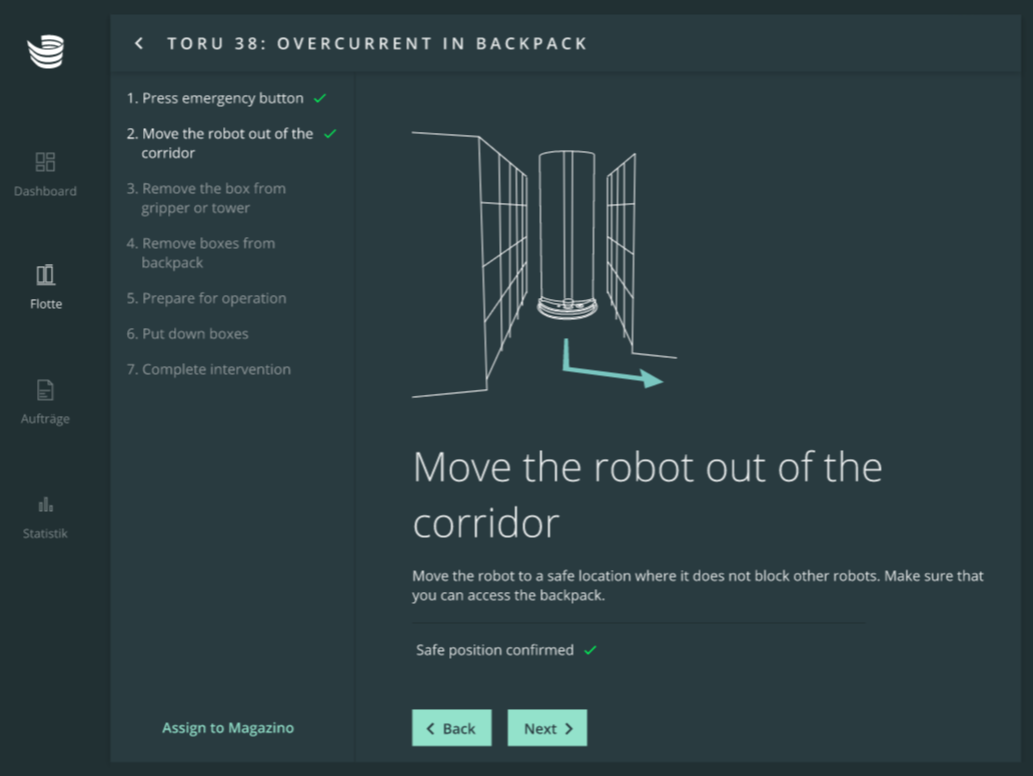
Manually move the robot out of the corridor and to a safe location where it does not block other robots. Then press ‘Confirm’.
The safe position status should change to “Confirmed”. Then press ‘Next’.
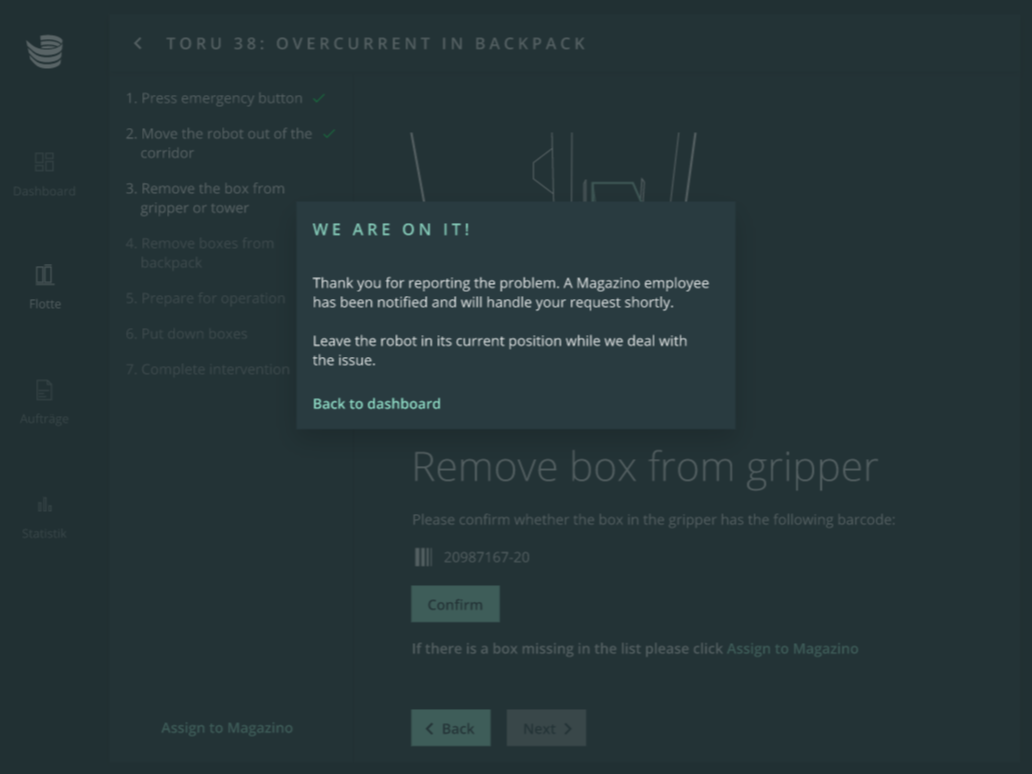
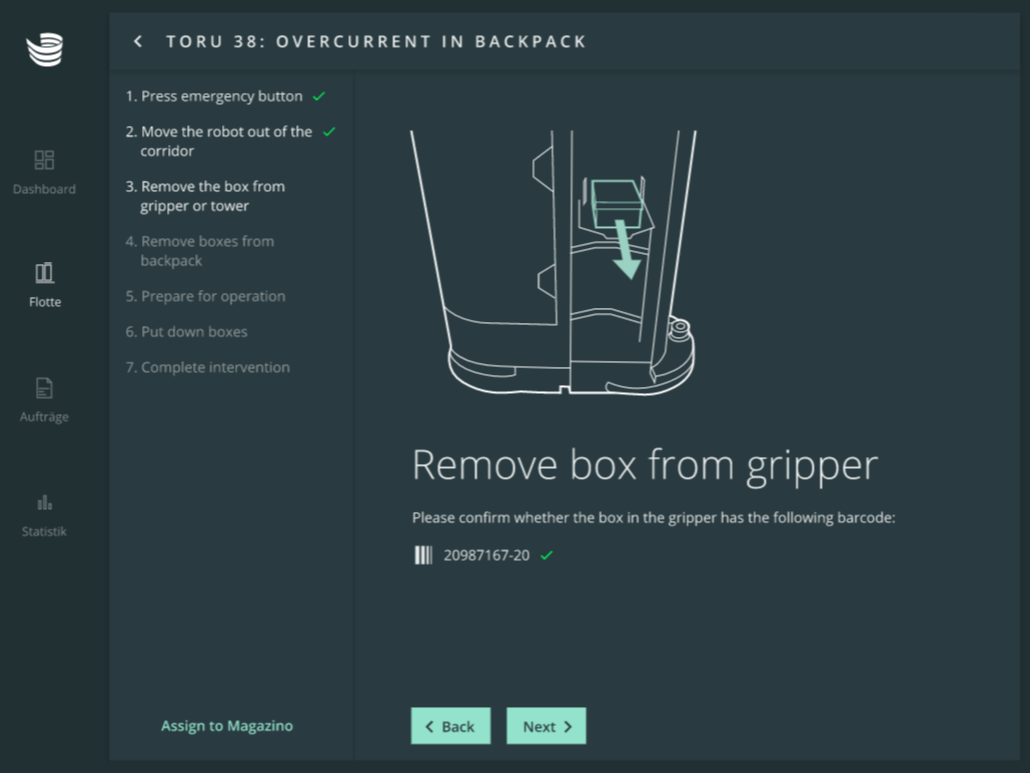
Remove the box from the gripper and check that the barcode of the box corresponds to the barcode specified in ARC. Then press ‘Confirm’.
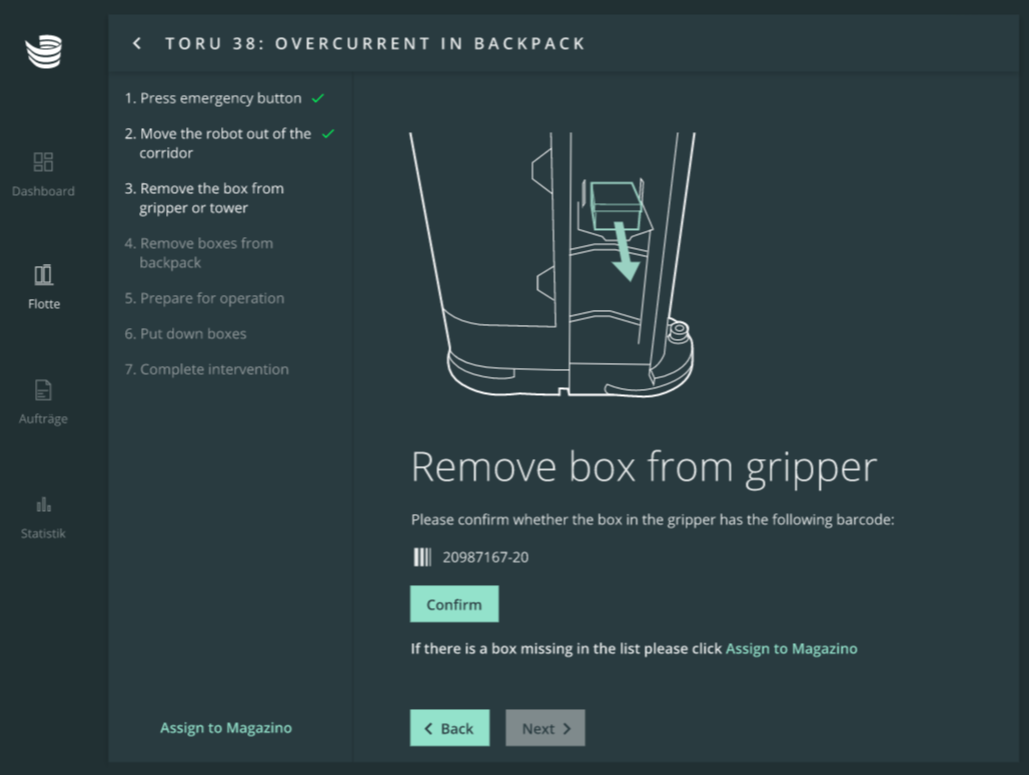
A green checkmark should appear next to the barcode. Then press ‘Next’.
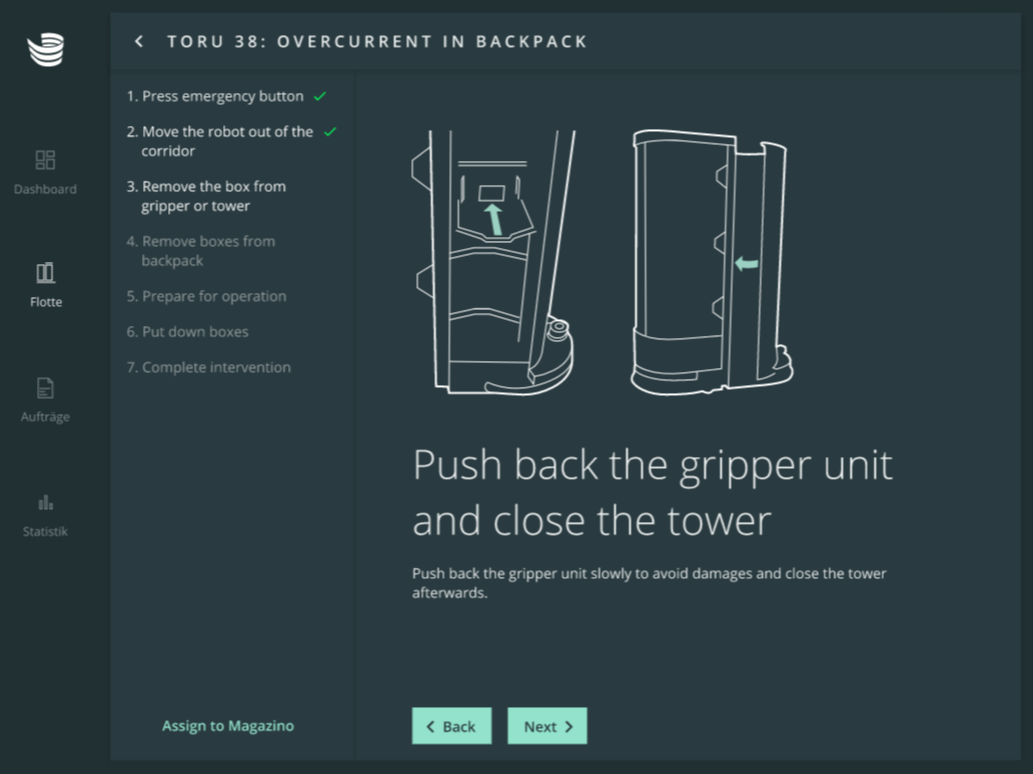
Push the gripper unit back into the tower slowly to avoid damages. Then close the tower of the robot. Once done, press ‘Next’.
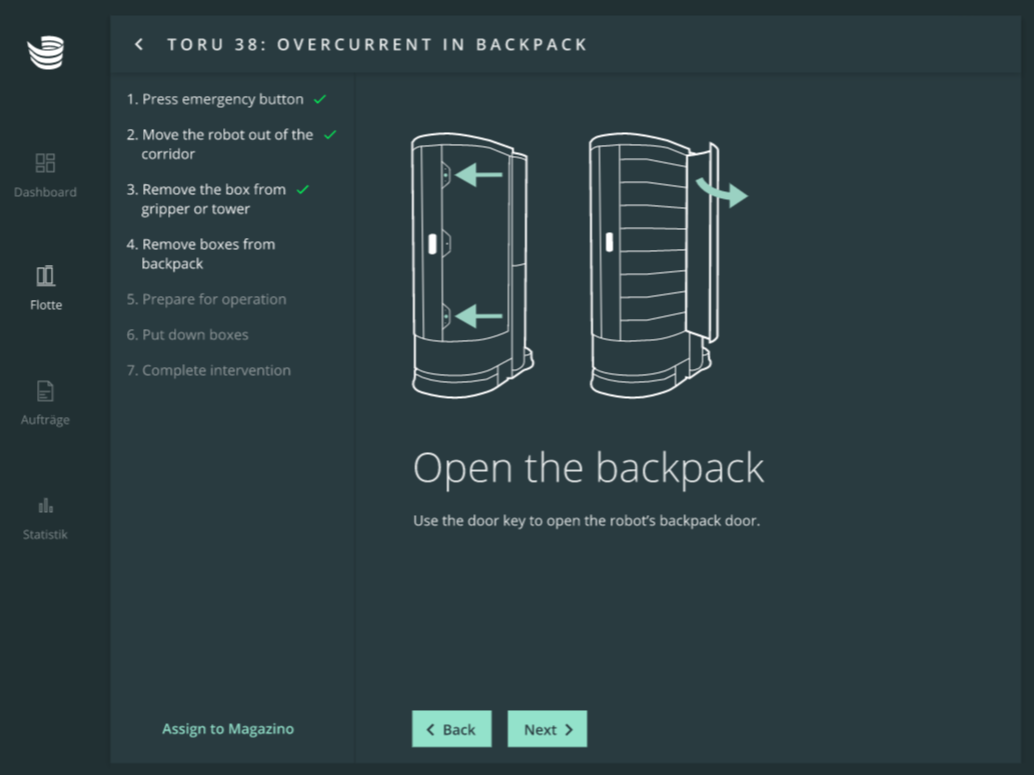
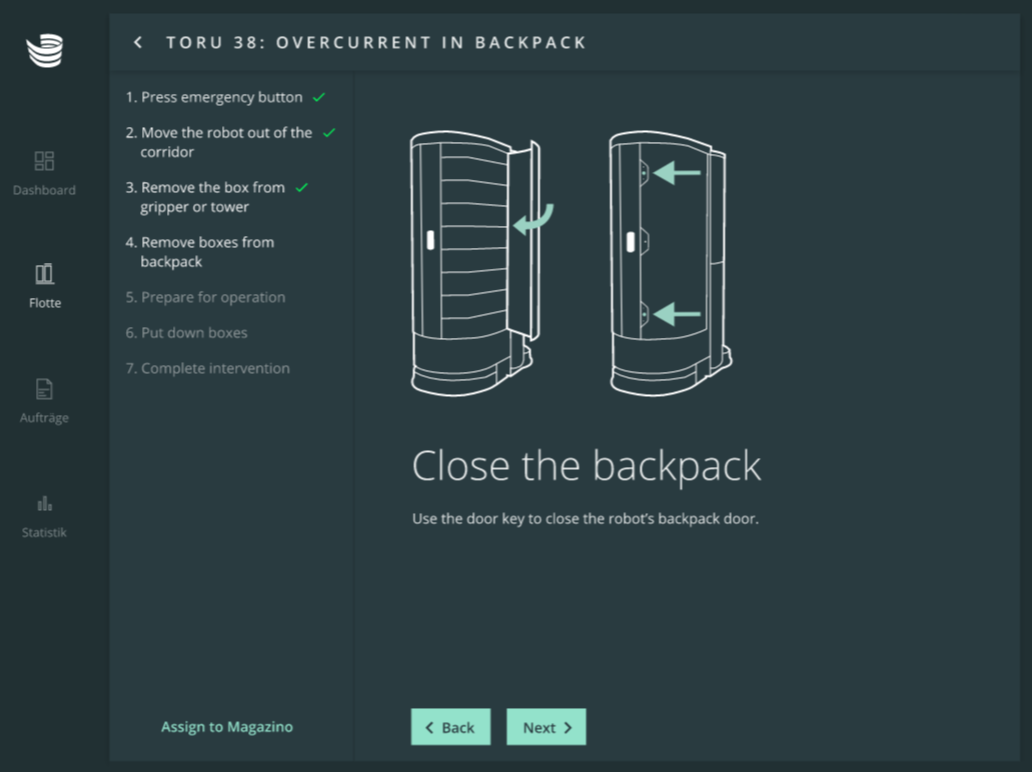
Use the TORU key to unlock the backpack door. Then open the door and press ‘Next’.
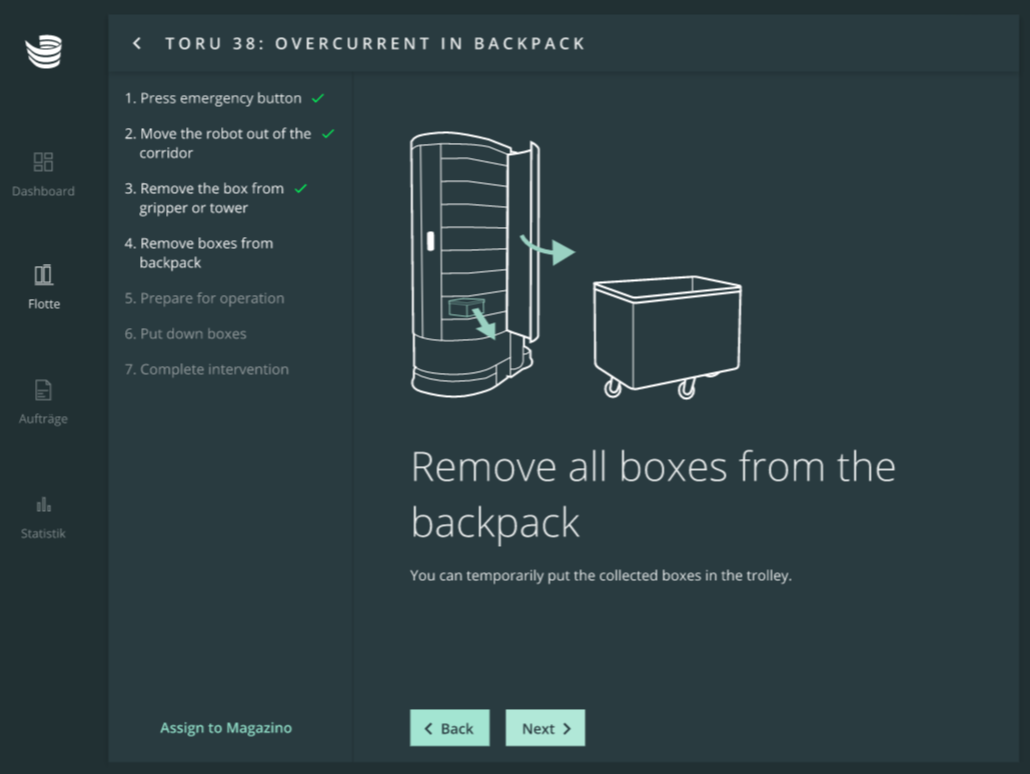
Remove all boxes from the backpack and temporarily store them in the trolley. Then press ‘Next’.
Close and lock the backpack door. Then press ‘Next’.
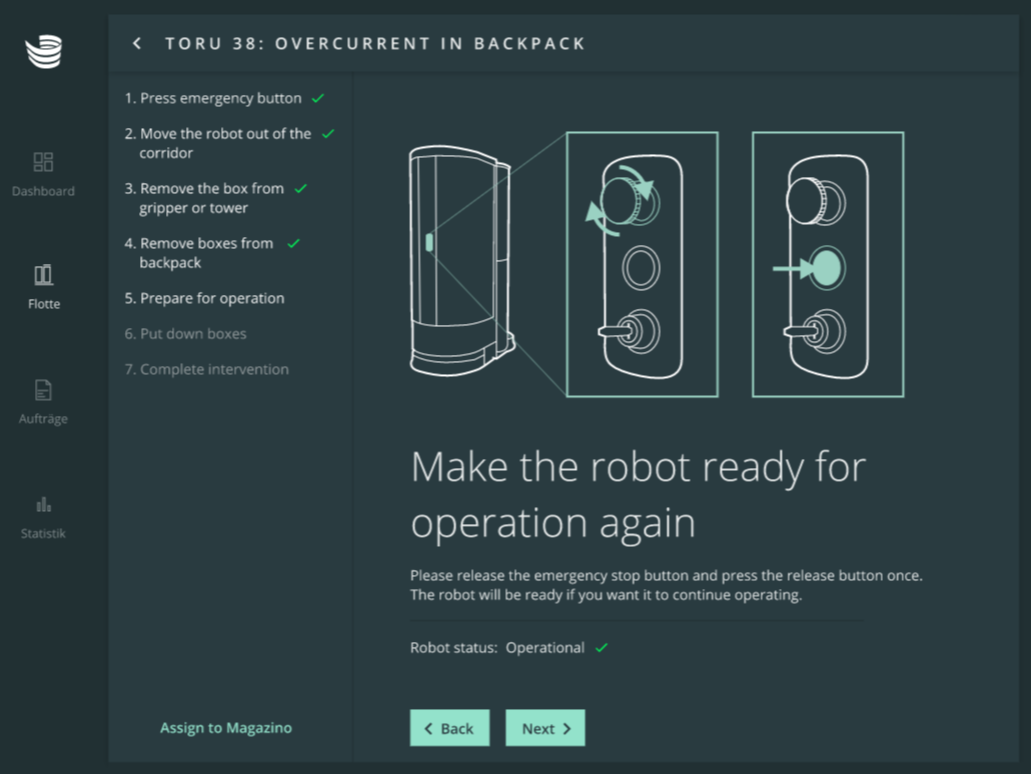
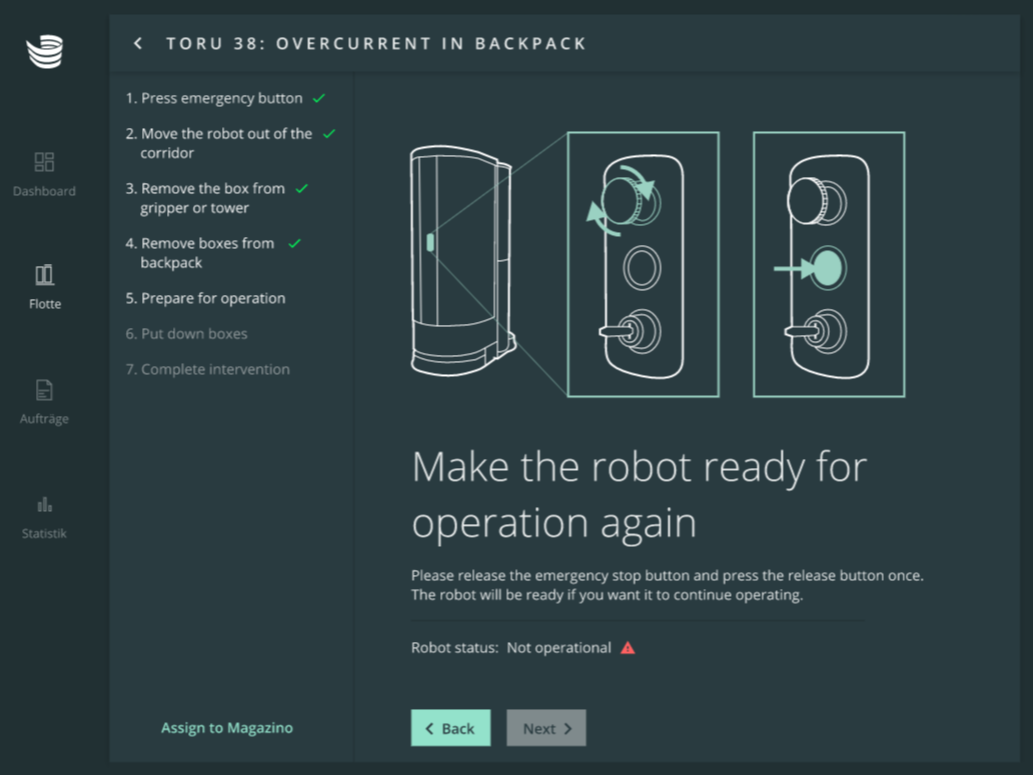
Release the emergency button and press the restart button on the robot. Then press ‘Next’.
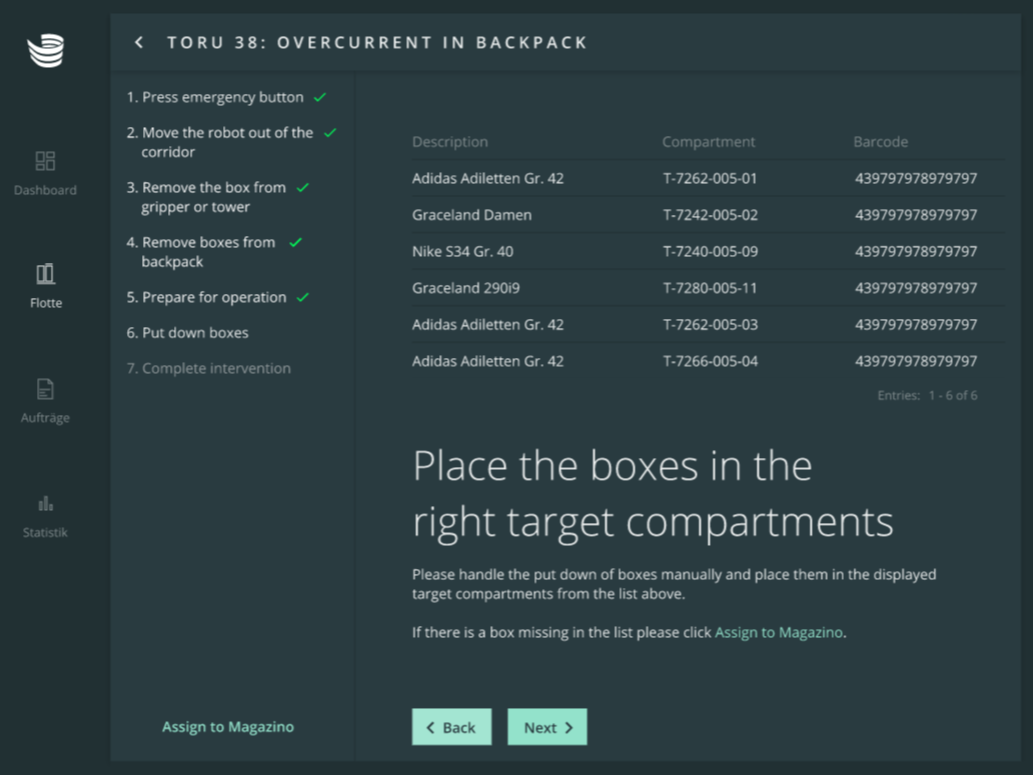
Check the item list and place the extracted boxes in the specified target compartments. As you proceed, click the checkmark symbol next to each item on the list – the symbol will turn green. Then press ‘Next’.
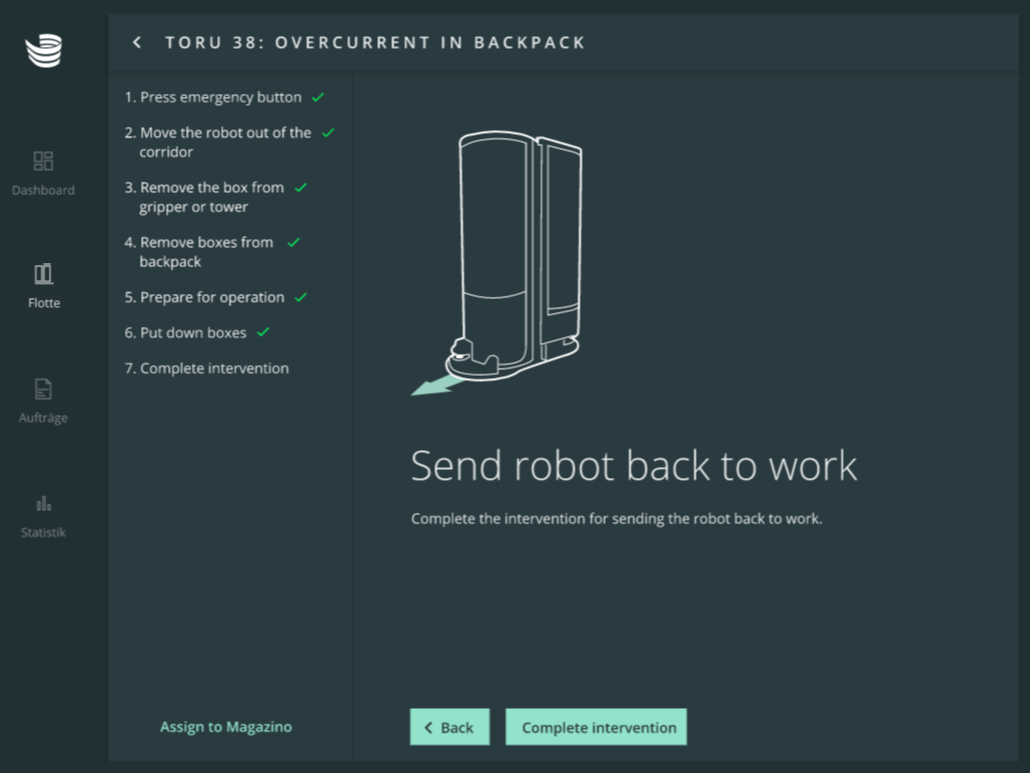
Press ‘Complete intervention’ to send the robot back to work.
If you are unable to make the robot operational, press ‘Assign to Magazino’ in the bottom left corner.
Choose ‘Yes’ and then press ‘Confirm’.
The Magazino Support team will reach out to you as soon as possible.